
基于霍尔位置传感器的永磁同步电机速度估计方法研究
2019-08-05 07:20王凯王之赟宗兆伦张建亚张露锋
电机与控制学报 2019年7期
关键词:永磁同步电机
王凯 王之赟 宗兆伦 张建亚 张露锋
摘 要:为了提高永磁同步电机(PMSM)驱动系统的环境适应性并降低控制系统成本,采用开关型霍尔位置传感器取代通常使用的高分辨率位置传感器—光电编码器或者旋转变压器进行转子位置和速度的估算,实现对电机的高性能矢量控制。该文首先分析了传统霍尔位置传感器的估算算法,为了解决传统估算算法中的问题并提高霍尔位置传感器的估算效果,使用一种闭环的估算方法,将霍尔位置信号矢量化,前馈解耦后通过观测器估算出连续的位置信号,并结合改进的锁相环结构(PLL)提取速度信号,实现位置和速度的准确估算。最后通过实验平台验证对比了该方法和传统的估算方法的性能。
关键词:霍尔传感器;永磁同步电机;矢量控制;位置观测器;锁相环
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2019)07-0046-07
Abstract:In order to improve the environmental adaptability and reduce the cost of the permanent magnet synchronous motor (PMSM) control system,Halleffect sensors were taken to replace the traditional high resolution position sensorsoptical encoders or resolvers, which are usually used to achieve the rotor position and speed of the motor to realize vector control. The estimation algorithm of the traditional Hall position sensor was analyzed firstly. In order to solve the problems in the traditional estimation algorithm and improve the estimation performance of the Hall position sensor, a closed loop estimation method was proposed. Considering Hall position signals as vector signals, the position estimated observer with feedforward decoupling was used to gain continuous position information. Then the speed signal was extracted by the improved structure of phase locked loop (PLL), realizing the accurate estimation of position and speed. Finally through the experiment platform, this estimated method was verified and compared with the traditional method.
Keywords:Halleffect sensors; permanent magnet synchronous motor; vector control; position observer; phaselock loop
0 引 言
因永磁電机具有转矩密度高,机械结构简单,体积小的特点,近些年来永磁电机被广泛运用于生产生活领域。相比于无刷直流电机(brushless direct current motor,BLDC)明显的转矩脉动,永磁同步电机能够输出平滑的转矩,降低系统运行的噪音。永磁同步电动机一般采用矢量控制方式,控制系统需要获得准确可靠的位置信息实现对电机速度和电流的控制。驱动系统通常采用高分辨率的机械式位置传感器获得位置和速度信息,例如:光电编码器,旋转变压器。但是同轴安装的机械式传感器需要额外的机械结构,增加了系统的所占的空间和成本,而且在高温潮湿高盐等较为恶劣的工况下,机械式传感器的可靠性降低。
为了替代传统机械式传感器的无位置传感器方法主要分为两种技术路线:一种是基于电机的电压电流方程的计算方法,这种方法对参数的精度要求较高且在低速时性能不理想。另一种是利用了电机的凸极率注入高频信号后提取位置和速度信号,高频信号注入法在低速和零速范围也能取得较好的估算效果,但是这种方法不直接适用于凸极率小的表贴式电机,且滤波器的构建导致算法较为复杂。
综合考虑上述方法存在的问题,采用开关型霍尔位置传感器一类的低分辨率位置传感器取代原本的机械式传感器成为一种兼具可靠性和成本优势的技术方案。开关型霍尔位置传感器最初是使用在BLDC的控制系统中,使用三个霍尔位置传感器获得6个离散的位置信号,控制三相电流的换向。但是离散的位置信号不能直接应用于永磁同步电机的正弦波控制中,需要通过一定的算法将离散的位置信号拟合成连续的位置信号。文献[1-3]通过计算相邻两个霍尔扇区之间转子的平均速度,通过插值法结合离散的位置信号估算出连续的转子位置信号,但是当转速变化剧烈时因为扇区间的平均速度更新滞后会导致误差。文献[4]提出利用线性校正取代直接校正改善由于安装误差带来的角度跳变提高系统性能。文献[5]提出了一种反电动势观测器结合霍尔位置传感器的估算方法,提高了估算的精度和解决了反电动势无位置技术低速使用的问题。文献[6-8]提出了一种零滞后的位置估算方法,将离散的位置信号当作空间矢量输入由电机机械运动方程构建的观测器中,估算出连续的位置和速度信号。文献[9]指出了这种方法不仅适用于3个霍尔位置传感器的情况而且适用于单霍尔位置传感器,两个霍尔位置传感器的情况下。直接从这种观测器结构中提取的速度信号中包含了较多的高频噪声,因此本文为了抑制速度信号中的这种高频噪声提高转速估算的性能采用霍尔位置观测器结合改进结构锁相环的结构。这种方法适用于全速度范围内的估算,具有较好的跟踪性能。本文基于dSPACE 的电机控制平台对该方法进行了验证。
1 基于平均速度的估算方法
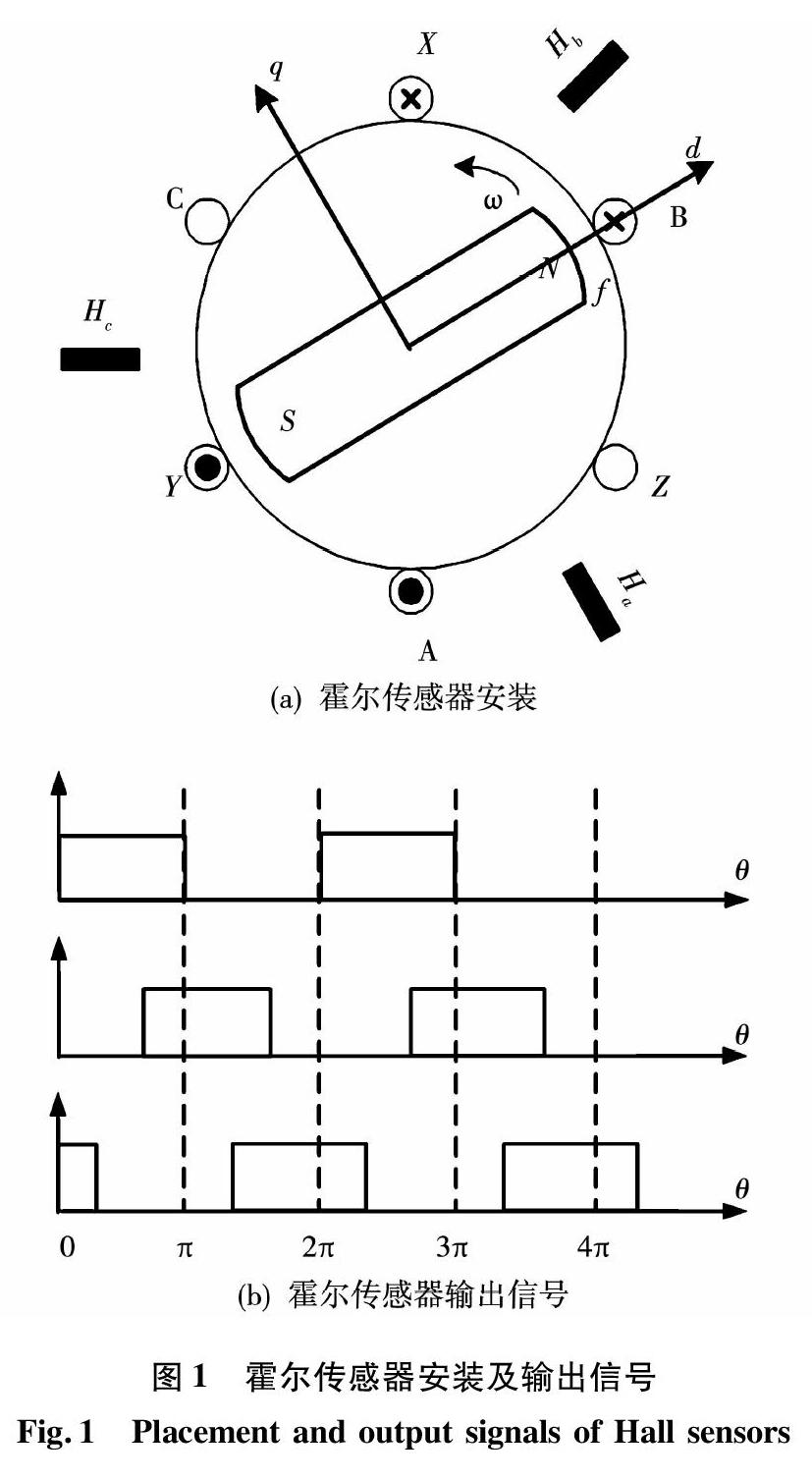
三个霍尔位置传感器分别被命名为Ha,Hb,Hc,间隔120°电角度安装在电机定子上,随着转子的旋转,霍尔位置传感器通过检测转子磁场强度过零点输出示每相间隔120°电角度、占空比为50%的方波信号,霍尔传感器的安装如图1(a)所示,输出波形如图1(b)所示。
三相霍尔信号可以组合成6个有效的位置信息可以将一个电周期均分为6个位置扇区。转子在扇区中的平均速度ω-h的计算公式为
但是这个估算方法还是存在着转速估算滞后的原理性误差,为了解决这种估算滞后引起的系统性能下降的现象,所以采用了一种基于霍尔位置传感器的位置观测器结构解决这种滞后问题。
2 基于位置观测器的估算方法
2.1 位置信号估算
为了解决这种因为平均速度计算导致的速度估算滞后性,建立了基于电机机械运动方程的位置观测器,电机机械运动方程为
其中:J是电机转动惯量;Tem是电机的电磁转矩;iq是q轴电流; Kt是电机的转矩常数;对于表贴式永磁同步电机Tem=Ktiq,TL是负载转矩,Ω电机转速,通常粘滞摩擦项B×Ω对电机的影响可以忽略。
将霍尔位置信号看作为做不连续运动的合成矢量信号。合成矢量中包含了连续旋转的基本矢量,和一系列的谐波矢量信号,矢量的分解表达式如式(7)所示。基波矢量为连续信号,代表了转子实际运动位置,谐波矢量导致合成矢量为间隔60°离散信号。
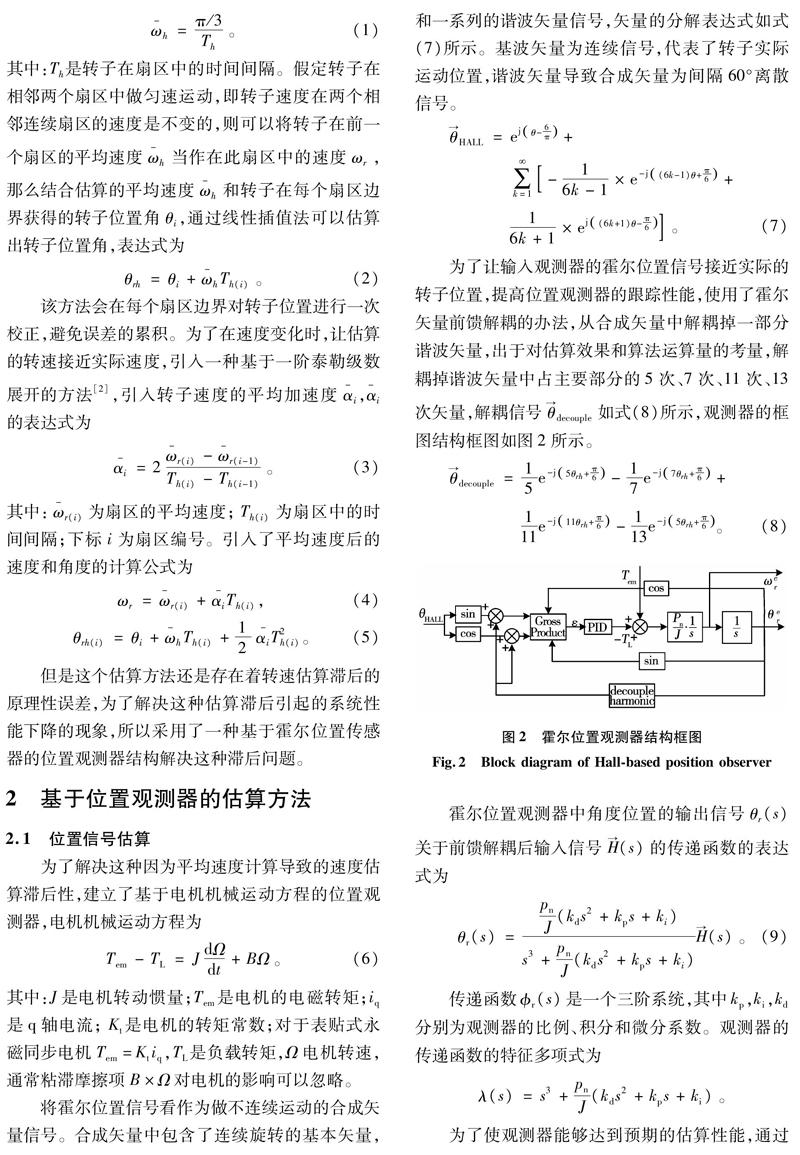
为了让输入观测器的霍尔位置信号接近实际的转子位置,提高位置观测器的跟踪性能,使用了霍尔矢量前馈解耦的办法,从合成矢量中解耦掉一部分谐波矢量,出于对估算效果和算法运算量的考量,解耦掉谐波矢量中占主要部分的5次、7次、11次、13次矢量,解耦信号θ→decouple如式(8)所示,观测器的框图结构框图如图2所示。
为了使观测器能够达到预期的估算性能,通过设定一个预期的带宽来整定调节器参数。将特征多项式改写为的理想形式(s+ωn)3,这里带宽ωn就变为系统唯一的调节参数[10],选取合适的ωn,就可以确定调节器的参数kd,kp,ki,上述传递函数可以改写成
本文中所述Hz的电机系统的转速范围为0~800 r/min,霍尔位置信号的频率的范围是0~80 Hz,则观测器的带宽ωn设置为80 Hz 。
2.2 速度信号提取
上述观测器除了能获取角度信号还能得出速度信号,速度信号ωr(s)关于输入信号H→(s)的传递函数为
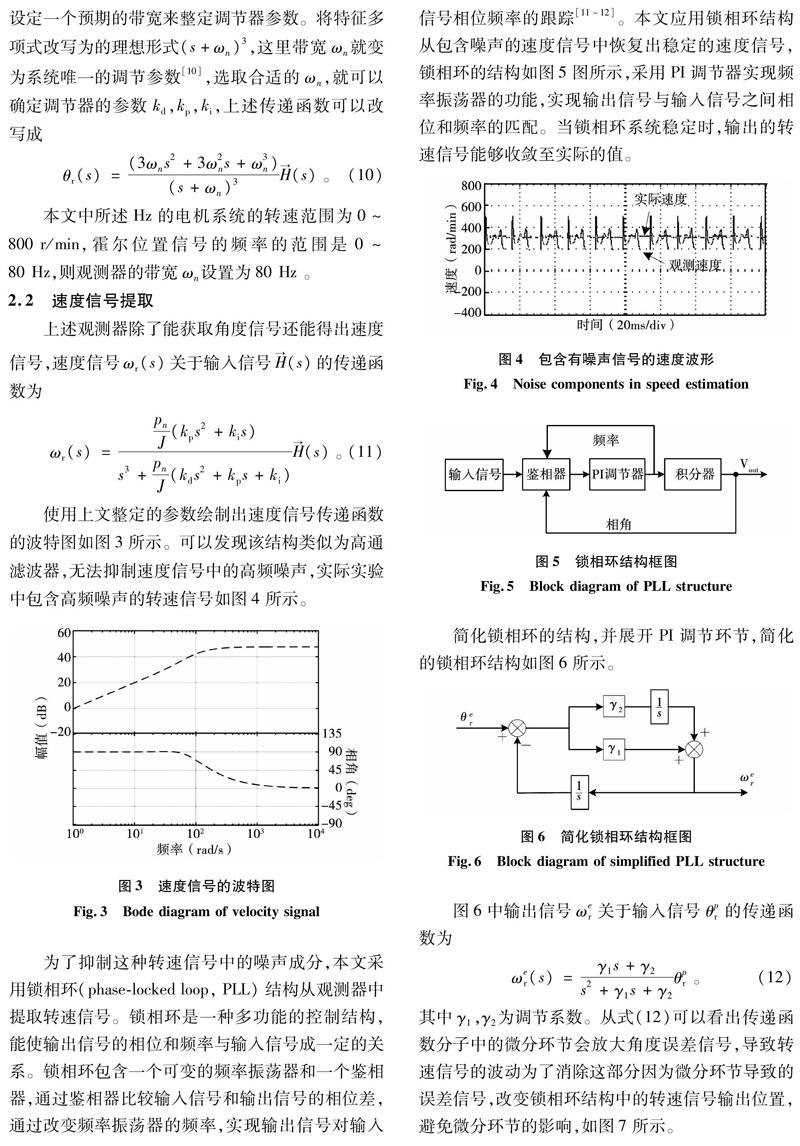
使用上文整定的参数绘制出速度信号传递函数的波特图如图3所示。可以发现该结构类似为高通滤波器,无法抑制速度信号中的高频噪声,实际实验中包含高频噪声的转速信号如图4所示。
为了抑制这种转速信号中的噪声成分,本文采用锁相环(phaselocked loop, PLL) 结构从观测器中提取转速信号。锁相环是一种多功能的控制结构,能使输出信号的相位和频率与输入信号成一定的关系。锁相环包含一个可变的频率振荡器和一个鉴相器,通过鉴相器比较输入信号和输出信号的相位差,通过改变频率振荡器的频率,实现输出信号对输入信号相位频率的跟踪[11-12]。本文应用锁相环结构从包含噪声的速度信号中恢复出稳定的速度信号,锁相环的结构如图5图所示,采用PI调节器实现频率振荡器的功能,实现输出信号与输入信号之间相位和频率的匹配。当锁相环系统稳定时,输出的转速信号能够收敛至实际的值。
简化锁相环的结构,并展开PI调节环节,简化的锁相环结构如图6所示。
其中γ1,γ2为调节系数。从式(12)可以看出传递函数分子中的微分环节会放大角度误差信号,导致转速信号的波动为了消除这部分因为微分环节导致的误差信号,改变锁相环结构中的转速信号输出位置,避免微分环节的影响,如图7所示。
式(12)和式(13)的表达式可以发现,改进的锁相环输出结构的传递函数比传统的少一个微分环节,这样的结构减小了输出信号的稳态误差,抑制了输出信号中的高频噪声,改进锁相环提取的速度的输出信号的波形如图8所示。
基于霍尔位置传感器观测器结合改进的锁相环的整体框圖如图9所示。
3 两种估算方法实验对比验证
3.1 实验介绍
为了验证上文所述基于霍尔位置传感器的估算方法,搭建了基于DS1107 dSPACE 的实验验证平台,如图10所示。主要包括稳压电源、工控机、DS1107 dSPACE半实物仿真器、永磁同步电机,电机同时安装光电编码器和霍尔传感器,光电编码器得出的信号作为电机的实际值作为实验参考。以下实验中将基于霍尔位置观测器结合改进锁相环的估算方法简称为基于霍尔观测器的估算方法,实验所用电机的参数如表1所示。
3.2 静态实验
静态实验的实验结果如图11所示,对比了传统的基于平均加速度的估算方法和霍尔观测器的估算方法。图中所示分别为光电编码器得到的实际位置,估算的角度位置和两者间的角度误差。两种估算方法实验的转速均为500 r/min,负载为2 N·m。通过实验波形可以看出,两种估算方法在电机稳定运行的状态下都能取得较好的估算效果。
3.3 动态实验
为了测试两种方法的动态性能,在保持控制系统参数不变的情况下,在电机运行于500 r/min时突加负载转矩至2 N·m,如图12所示。可以发现基于霍尔位置观测器的估算方法的恢复时间约为90 ms,基于一阶平均加速度的方法的恢复时间约为140 ms,基于霍尔位置观测器的估算方法的恢复时间要明显比传统的基于平均加速度的方法短。图13所示的为电机运行于500 r/min和轻载0.5 N·m的情况下改变给定转速为-500 r/min使电机由正转向反转切换的波形。可以发现基于平均加速度的估算方法在电机速度将为零后出现了堵转的现象,而基于霍尔位置传感器的位置估算方法的可以完成电机正反转切换。
4 结 论
本文研究了一种永磁同步电机基于霍尔位置传感器的估算方法,根据电机的机械运动方程建立了位置观测器,并通过前馈解耦霍尔矢量信号,得到准确的位置信号,同时针对速度输出中的噪声信号,使用改进的锁相环结构提取平滑的速度信号,取代了高分辨的位置传感器,实现对电机精确控制。通过实验平台将上述与传统的检测霍尔扇区间平均加速度的方法进行了对比,实验结果表明本文提出的方法相较于传统的估算方法具有更好的抗扰动校正性能和动态跟踪性能,是一种兼具成本和性能的电机位置传感器解决方案。
参 考 文 献:
[1] MORIMOTO S, SANADA M, TAKEDA Y, Sinusoidal current drive system of permanent magnet synchronous motor with low resolution position sensor[C]//San Diego, CA, Proc. IEEE IAS Annu. Meeting, 1996.
[2] MORIMOTO S, SANADA M, TAKEDA Y. High performance currentsensorless drive for PMSM and SynRM with only lowresolution position sensor[J]. IEEE Transactions on Industrial Electronics, 2003, 39(3):792-801.
[3] DALALA Z M, CHO Y H, LAI J S. Enhanced vector tracking observer for rotor position estimation for PMSM drives with low resolution halleffect position sensors[C]//Chicago, IL, IEEE Int. Electric Machines & Drives Conf. (IEMDC), 2013.
[4] 荀倩,王培良,蔡志端,等.霍尔转子位置预估方法及其误差校正[J]. 电工技术学报,2017,36(6):145-155.
XUN Qian, WANG Peiliang, CAI Zhiduan, et al. Hall rotor position estimation method and its error compensation[J]. Transactions of China Electrotechnical Society, 2017,36 (6):145-155.
[5] KIM S Y, CHOI C, LEE K, et al, An improved rotor position estimation with vectortracking observer in PMSM drives with lowresolution halleffect sensors[J]. IEEE Transactions on Industrial Electronics, 2011,58(9):4078-4086.
[6] CAPPONI F G, DONATO G DE , DEL FERRARO L, Brushless AC drive using an axial flux synchronous PM motor with low resolution position sensors[C]// Aachen, Germany, IEEE 35th Annual Power Electronics Specialists Conference (PESC04), 2004.
C. F. GIULII, G. D. DE AND L. F. DEL, AC brushless drive with lowresolution halleffect sensors for surfacemounted PM machines[J].IEEE Transactions on Industry Application,2006.42(2):526-535.
[7] DEGNER M W. Flux, position, and velocity estimation in AC machines using carrier signal injection[D]. Madison:University of WisconsinMadison, 1998.
[8] SCELBA G, DEDONATO G, PULVIRENTI M, et al. Halleffect sensor fault detection, identification, and compensation in brushless DC drives[J]. IEEE Transactions on Industry Applications, 2016, 52(2): 1542-1554.
[9] FU H, LIU C, ZUO Y F. A completely decoupling twodegreeoffreedom controller for permanent magnet synchronous motor speedregulation system[C]// Monte Carlo, 2016 Eleventh Int. Conf. Ecological Vehicles and Renewable Energies (EVER), 2016.
[10] LIU J M, ZHU Z Q. Improved sensorless control of permanent magnet synchronous machine based on thirdharmonic backEMF[J]. IEEE Transactions on Industry Applications, 2014, 50(3): 1861-1870.
[11] SHEN J X, IWASAKI S. Sensorless control of ultrahighspeed PM brushless motor using PLL and third harmonic back EMF[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2): 421-428.
(編辑:刘素菊)
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
