考虑过电分相的高速列车节能操纵方法
2019-08-19 10:25麻存瑞毛保华杜慎旭张思佳
中国铁道科学 2019年4期
麻存瑞,毛保华,柏 赟,杜慎旭,张思佳
(1.北京交通大学 城市交通复杂系统理论与技术教育部重点实验室,北京 100044;2.中铁第四勘察设计院集团有限公司 线路站场设计研究处,湖北 武汉 430063)
我国高速铁路接触网上每隔20~30 km就有1个电分相。正常情况下动车组采用ATP自动过电分相,使受电弓在无电流情况下惰行通过分相区。过电分相是高速铁路列车运行过程中不可或缺的一个重要步骤。因此,研究考虑过电分相的高速列车节能操纵方法,对降低企业运营成本,实现高速列车安全、节能运行具有重要实际意义。
列车节能操纵优化是在保证列车安全、正点、舒适、准确停车的基础上,研究如何操纵列车,使列车牵引能耗最小。ICHIKAWA[1]在不考虑坡度变化的情况下,通过构建简单的列车运行方程,利用Hamiltonian函数寻找列车的最优控制策略,得到了列车惰行与制动的最佳工况转换点。随后众多学者对该问题进行了深入研究,并取得了突破性的进展。MILROY[2]和LEE等[3]研究了平缓坡道、较短站间距条件下,列车最优速度轨迹包含3个阶段:最大加速、惰行和制动,较长区间还应包括巡航阶段。之后,南澳大利亚大学的研究学者HOWLETT[4]基于Pontryagin极大值原理进一步系统地证明了平直线路上的列车最优操纵应包含最大牵引、巡航、惰行、最大制动4个阶段,并给出了各工况转换点的求解方法。此外,他们还针对线路限速对优化曲线的影响展开研究,指出当限速值低于列车最佳巡航速度时,列车以最大允许速度行驶是一种最为节能的操纵方式[5],并且针对变坡道情况下,认为内燃机车所产生的功率与燃料供应速率成正比,给出了变坡道情况下的最优控制策略的关键方程[6]。我国学者也对该问题展开了大量研究。金炜东等[7]讨论了在起伏坡道下的列车节能操纵问题,将列车运行区间划分为若干小区间,并提出了1种全局优化与局部优化相配合的算法结构。刘海东等[8]从曲线、坡道以及列车重量等方面对城市轨道交通能耗的影响进行了仿真研究。崔恒斌等[9]考虑了再生制动利用率对列车节能控制的影响,提出了基于再生制动的列车的节能操纵策略。刘建强等[10]基于典型操纵序列“最大牵引—恒速运行—惰行—最大制动”,提出了1种先搜索无限速约束最优解,再根据限速约束对结果进行调整的方法。王青元等[11]考虑高速列车制动系统,将制动力分再生制动和空气制动,引入最小值原理证明了考虑再生制动时列车最优控制的必要条件。上官伟等[12]根据线路高、低限速及其组合关系将列车运行区间分为不同的子区间类型,然后分析不同子区间类型的列车最优节能策略,采用差分进化算法对该问题进行了研究。柏赟等[13]在标准4阶段操纵方法的基础上,通过进一步优化操纵工况序列及其转换点,减少了地铁列车在长大下坡道上制动的时间,并充分利用坡道势能来减少牵引能耗。可见,对于列车节能操纵优化问题,既有研究已从各个方面进行了深入研究,但是这些节能优化研究对于电分相存在情况下的问题并未进行深入分析。因此,有必要构建考虑过电分相的定时节能操纵模型,并设计相应的算法研究电分相和列车牵引能耗之间的关系。
本文结合我国高速列车必需过电分相的特点,构建考虑过电分相的操纵优化模型,并基于4阶段节能策略,结合司机实际操纵时惰行“丢时间点”的特征,采用划分子区间及优化工况序列及其转换点的方法设计了2种求解算法,即司机常规操纵仿真算法和1种具有双层编码的遗传算法,求解考虑电分相的高速列车节能操纵问题。
1 问题描述
既有研究表明,单列车的最优节能速度轨迹一定由最大牵引、巡航、惰行和最大制动4种工况组成。因此,本文首先根据限速和电分相将运行区段划分为多个小区间,然后根据小区间特点对每个小区间进行分类,并对分类后的不同类型的子区间运用4阶段节能策略,实现列车整体节能。
图1为某高速列车从A站出发至B站停车的子区间及其运行阶段划分。由图1可以看出,图中共有4个限速和1个电分相,它们将列车的整个运行区段划分为6个子区间。根据进出站信号机,可将列车的整个运行过程分为站内和区间,电分相只能设在区间。为了在后文中对电分相的位置便于分析,将出站信号机与列车达到巡航速度的点所在的区段称为加速区,将起模点至进站信号机所在的区段称为减速区,将区间中的其它区段称为恒速区。列车在运行过程中若下一子区间限速高于当前子区间,说明列车在下一子区间将可能会加速运行,也说明列车在当前区间不可能制动减速。当下一子区间的限速低于当前子区间时,说明列车在进入下一子区间时,速度必须满足子区间限速约束,也说明列车在当前子区间可能会存在惰行和制动工况。此外,列车通过分相区时,为了安全必须惰行通过。因此,对于列车运行过程中的各个子区间可以分为3类。
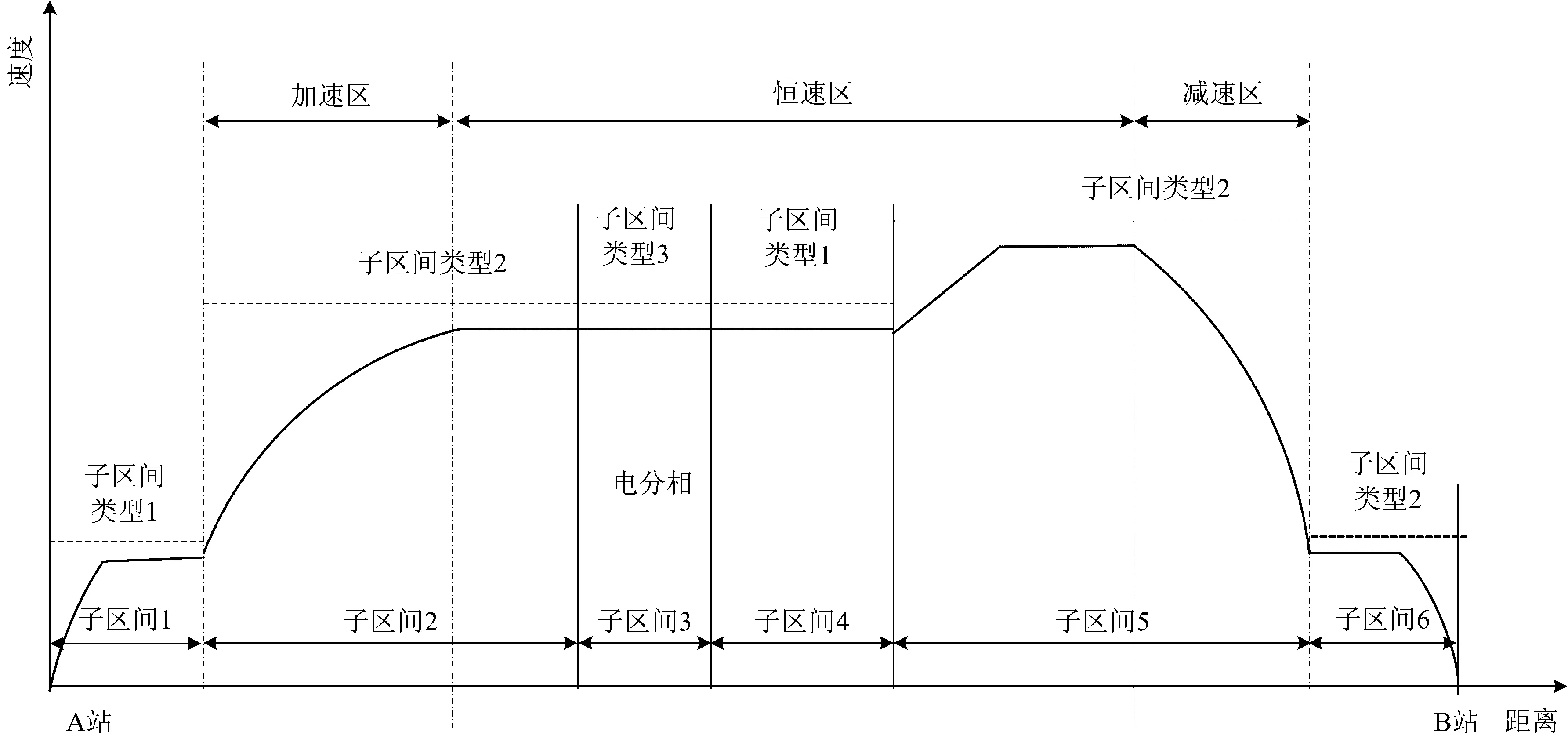
图1 子区间及运行阶段划分
子区间类型1:当前子区间的限速小于下一子区间的限速。
子区间类型2:当前子区间的限速大于等于下一子区间的限速。
子区间类型3:电分相区间。
设定最后一个子区间的下一个子区间的限速为0。由于列车在分相区必须惰行通过,所以当列车速度较高,分相区又处在大下坡时,列车可能会在分相区超限速。为了在分相区不超限速,列车在进入分相区前必须减速至一定的合理范围内。因此,将在分相区之前与其限速相同的子区间也归类为子区间类型2。
将所有子区间归类后,可以发现:子区间类型1由于其下一个子区间限速高于当前子区间,其运行轨迹中不可能会出现制动减速的运行状态;子区间类型3由于是电分相区间,所以正常情况下列车必须惰行运行通过;子区间类型2由于其下一个子区间的限速低于当前限速,所以子区间类型2中一定存在惰行减速或最大制动减速的运行状态,可能会存在最大牵引加速或巡航运行的状态。对于该问题,本文主要通过优化可能的工况组合和潜在转换点来找到列车最优速度轨迹。
2 模型构建
首先做如下模型假设:在任何情况下,列车都能够取得理论上的最大牵引力和最大制动力,不考虑牵引网网压对列车牵引和制动性能的影响;列车牵引力和制动力对控制量和车速是连续的;不考虑车载ATP(Automatic Train Protection)限速等动态限速对列车操纵的影响;电分相可以设在除车站之外的任意区域,不考虑其工程限制条件。
1)决策变量
按照子区间划分和归类方法,将列车整个运行区段划分并归类后,依据上文中提到的列车在不同类型子区间可能存在的运行状态,结合列车在巡航过程中尽可能避免制动巡航的节能策略,从而可以确定子区间类型1只需确定子区间巡航速度或子区间运行时分便可确定其运动轨迹,子区间类型3只需确定子区间运行时分或进入速度也可确定其轨迹;而子区间类型2除了确定子区间运行时分外,还需知道其巡航速度或牵引转巡航的点后才可以确定其速度轨迹。
2)参数定义
E为牵引能耗,kWh;η为牵引力使用系数;Ft(v)为牵引力,kN;Fb(v)为制动力,kN;Fi为坡道阻力,kN;Fr为曲线阻力,kN;S为终到站中心里程;s为位移,m;TS为计划运行时分,s;δ为时分误差;vlim为限速,km·h-1;Δa为加速度变化量;Ttimer为时间步长;Hi为第i时间步长的列车运行工况;M为列车质量,t;g为重力加速度,m·s-2;i为坡道千分数,‰;R为曲线半径,m;SD-H为分相区;P为牵引工况;C为惰行工况;B为制动工况。
3)优化模型
模型以高速列车运行中总的牵引能耗最小作为优化目标,主要约束有定时约束、限速约束、舒适度约束和电分相约束等。
目标函数为

(1)
约束条件为
(2)
0≤v(s)≤vlim
(3)
(4)
Hi∈{P,C,B}
(5)
Ft(v)Fb(v)=0
(6)
(7)
Fi=Mgi
(8)
(9)
v(0)=0
(10)
v(S)=0
(11)
ω0=a+bv+cv2
(12)
约束条件中,式(2)为定时约束,表示列车实际运行时分与计划运行时分需在一定的误差范围内;式(3)为限速约束,表示列车在任一里程点的速度必须满足限速约束;式(4)为舒适度约束;式(5)表示列车运行只有3种工况,牵引、惰行和制动;式(6)表示牵引力和制动力不能同时存在;式(7)为列车在电分相区域的工况约束,表示当列车在分相区时,只能存在惰行工况;式(8)和式(9)分别表示坡道附加阻力约束和曲线附加阻力约束;式(10)和(11)分别表示列车起终点速度约束;式(12)为基本阻力公式。
3 算法设计
针对电分相存在条件下的高速列车定时节能优化问题,设计2种求解算法:司机常规操纵仿真算法和节能操纵算法。
3.1 司机常规操纵仿真算法
《CRH系列动车组操作规则》要求动车组列车需“启动稳、加速快、适时使用恒速功能、一次稳准对标停车”。实际中,当列车启动后,动车组司机会操纵列车、快速牵引至允许速度,然后以允许速度巡航运行,当列车在前方车站需停站时,通常采用惰行“丢时间点”的方式来实现定时约束,最后制动减速至停车。然而,假若电分相设在一个坡度较大的下坡道时,若采用这种司机常规操纵仿真算法,列车在电分相区域可能会超限速,因此列车需在电分相前的某个点开始制动减速,才能使列车在限制速度以下运行。司机常规操纵仿真算法流程如下。
步骤1:查找下坡道的电分相,从电分相右界处惰行反推至电分相左界处,若左界处的速度高于允许速度,转步骤(2),否则步骤(3)。
步骤2:采用二分法获得电分相右界的速度。初始化时上界为顶棚速度区允许速度,下界为平均旅行速度,平均旅行速度通过线路总里程和计划运行时分确定。
步骤3:查找高限速至低限速区段,从低限速起点开始制动反推获得高限速开始制动减速的点。
步骤4:采用二分法寻找巡航转惰行的点,将冗余的时分通过惰行“丢时间点”的方式消耗,实现定时约束。
步骤5:惰行转制动的点通过惰行曲线和制动曲线的交点确定。
3.2 节能操纵算法
遗传算法具有强大的全局搜索和局部搜索能力,适合求解列车节能操纵问题,因此本文采用遗传算法求解。考虑到高速铁路站间距长,线路变化多样,求解规模庞大,若单纯地对每个子区间的工况转换点进行染色体编码求解,将会很难满足定时要求,产生大量不可行解,从而影响算法效率。因此,论文采用2层编码的染色体编码形式,通过上下2层染色体共同控制来提高算法的收敛性,其中第1层为每个子区间分配运行时间,第2层为每个子区间确定工况转换点。
每个子区间类型的上下两层染色体均采用二进制编码,其中每个子区间类型的上层编码染色体长度为8,下层编码染色体长度为16。由于目标函数都为正值,故以目标函数的倒数作为个体适应度。交叉算子、变异算子和选择算子是遗传算法的重要组成部分。文中交叉算子第1层采用单点交叉[14],第2层采用双点交叉[15],变异算子均采用基本位变异[14],选择算子采用轮盘赌选择[15],并精英保留。交叉变异产生的新个体可能会不满足定时约束,此时通过局部搜索算子来动态调整巡航转惰行的点,使其满足子区间定时约束。
图2为列车节能操纵算法流程。图2上层算法中每个子区间类型的最小运行时分通过列车节时运行获得,线路总冗余时分为计划运行时分和最小运行时分的差值,每个子区间类型的运行时分由式(13)—(15)计算求得。下层算法中,每个子区间类型2的巡航速度由式(16)和(17)计算求得。

图2 列车节能操纵算法流程
(13)
(14)
tk,value=tk,min+Δtk
(15)
(16)
vk,value=vk,min+(lim(vk)-vk,min)vk
(17)

式(13)为上层染色体解码计算式,表示将二进制染色体编码转变成十进制整数;式(14)表示求解子区间类型的时间增量;式(15)表示求解子区间类型的运行时间;式(16)表示将下层染色体二进制编码转变成十进制小数,即求解子区间类型2的速度增量比例;式(17)表示求解子区间类型2巡航速度,其中,vk,min通过第k个子区间类型的长度和上层算法确定其运行时间的比值。
此外,图2下层算法中的子区间类型1的巡航速度及子区间类型3的进入速度和离去速度,可依据上层算法得到的子区间类型运行时分,采用二分法计算求得。当子区间类型1和子区间类型3的运行轨迹确定后,可根据子区间类型2的运行时分和巡航速度确定巡航转惰行的工况转换点,而惰行转制动的工况转换点为惰行曲线和制动反推曲线的交点。
4 案例应用
仿真线路选用2条实际线路和1条虚拟线路。为了便于分析,将选用的武广线上的实际线路称为线路1;设坡长不变,依据《高速铁路设计规范》,随机增大了坡度的线路1,称为线路2;将贵南线上的实际线路称为线路3。将司机常规操纵仿真算法称为算法1,将节能操纵算法称为算法2。线路1、线路2和线路3均仅设1个电分相,可设在加速区、恒速区或减速区,分相区长度为800 m。线路1、线路2和线路3的坡度信息分别如图4、图5和图6所示。电分相设置的位置信息和线路曲线信息如表1所示。仿真列车各参数信息,见文献[12]。列车牵引特性曲线如图3所示,牵引力采用线性插值计算方法求得。列车采用基于减速度的制动方式,制动响应时间为3.5 s。减速度制动公式为
(18)

图3 列车牵引特性曲线
仿真案例中,线路1和线路2只有坡度不同,其余参数均相同。线路长42.8 km,最大常用制动限速315 km·h-1,允许速度310 km·h-1,道岔限速80 km·h-1,列车计划运行时分800 s。仿真线路3全长22.735 km,最大常用制动限速240 km·h-1,允许速度230 km·h-1,道岔限速80 km·h-1,列车计划运行时分550 s。遗传算法参数取值中,种群大小200,双点交叉率0.95,单点交叉率0.98,基本位变异率0.1。

图4 线路1

图5 线路2

图6 线路3

表1 电分相设置位置与线路曲线
每条线路均设1个电分相,分别依次设在线路1、线路2和线路3的加速区、恒速区和减速区,并分别采用算法1和算法2求解,得到如表2所示结果。

表2 列车运行能耗(kW·h)
由表2可知,对于坡度起伏较小的线路1,算法1和算法2的求解效果基本一致,算法1求得的能耗略小。究其原因,主要由于本文中的遗传算法采用二进制编码,二进制转变为十进制时有一定的精度误差,并不能够得到最优的工况转换点。然而,对于线路坡度起伏较大的线路2和线路3,算法2的求解效果明显优于算法1,节能率超过5%。分析其原因,以电分相设在恒速区时的列车运行轨迹为例,当电分相设在恒速区时,2种算法求得的列车在线路2和线路3上的速度位移轨迹如图7和图8所示。算法1和算法2所得的列车运行轨迹在恒速阶段存在不同,算法1以固定的速度作为巡航速度且整个站间只有1个巡航速度,而算法2能够根据所划分的子区间优化计算获得不同的巡航速度,使得当线路起伏较大时,算法2比算法1能够利用更多的势能。

图7 当电分相设在恒速区时2种算法求得的列车在线路2上的速度位移轨迹

图8 当电分相设在恒速区时2种算法求得的列车在线路3上的速度位移轨迹
此外,由表2还可以看出,算法2求解3条线路的结果均是电分相设在恒速区最为节能,而算法1只有求解线路1的结果是电分相设在恒速区最为节能,求解线路2和线路3的结果均是电分相设在加速区最为节能。分析其原因,以电分相设在加速区和恒速区时算法1所得的速度轨迹为例,如图9和图10所示,当电分相设在加速区和恒速区时算法1求得的线路2和线路3上的速度位移轨迹,当电分相设在加速区时,因电分相约束使得列车首次恒速运行的里程点比电分相设在恒速区时列车首次恒速运行的里程点要大,从而使得电分相设在加速区比设在恒速区略微缩短了以制动工况维持巡航运行的持续时间。因此,算法1求解线路2和线路3的结果是电分相设在加速区最为节能,而算法2由于能够根据线路条件实现全局优化,其求解结果均是电分相设在恒速区最为节能。

图9 当电分相设在加速区和恒速区时算法1求得的列车在线路2上的速度位移轨迹
5 结 论
(1)提出了1种考虑电分相的高速列车定时节能操纵方法,结果表明所设计的方法能够求得电分相存在时的任意线路的列车最优节能运行轨迹,并且电分相设在恒速区最为节能。
(2)与司机常规操纵仿真算法相比,当线路坡度起伏不大时,2种方法的节能效果一致,当线路坡度起伏较大时,节能操纵算法的优化效果明显更优,节能率超过5%。

图10 当电分相设在加速区和恒速区时算法1求得的列车在线路3上的速度位移轨迹
(3)考虑电分相的高速列车节能操纵方法,对高速列车节能操纵和铁路设计部门优化电分相位置具有实际意义。
(4)本文尚未分析ATP(Automatic Train Protection)限速对列车操纵的影响,ATP曲线的计算及其ATP防护下的高速列车节能操纵建模还有待进一步研究。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
煤气与热力(2022年4期)2022-05-23
防爆电机(2021年5期)2021-11-04
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
舰船科学技术(2021年12期)2021-03-29
铁道通信信号(2020年1期)2020-09-21
中国外汇(2019年13期)2019-10-10
小学生学习指导(低年级)(2019年6期)2019-07-22
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27