
激光导引头输出斜率温度补偿算法及仿真技术研究*
2019-08-22 06:18杨凯,刘兵,徐燕
弹箭与制导学报 2019年2期
杨 凯,刘 兵,徐 燕
(西安现代控制技术研究所, 西安 710065)
0 引言
某型直升机载激光制导空地导弹,导弹飞行全程可分为方案段、中制导段和末制导段。在方案和中制导段,采用“程序控制+三通道姿态控制”方案,稳定导弹弹体姿态,补偿系统扰动,控制导弹按设计的方案弹道飞行[1];在末制导段采用“过重力补偿+倾斜稳定+阻尼+比例导引”方案,改善弹道特性、补偿系统扰动,控制导弹按改进比例导引律飞行,实现对目标的精确打击[2]。

图1 掠靶高飞故障示意图
文中所描述的导弹掠靶高飞故障现象如图1所示,文中对该故障的机理及解决思路进行阐述,提出一种适合激光导引头输出斜率的温度补偿算法,并完成仿真计算,可有效提高该武器系统的综合作战性能。
1 掠靶高飞故障机理分析
1.1 故障原因分析
从整个空地导弹系统工作原理进行分析,造成导弹掠靶高飞的可能原因有以下几点:
1)发射系统工作异常包括:发射装置工作异常、发射电子单元工作异常、地面观瞄指示器工作异常等;
2)目标系统异常:包括靶面异常、回波能量异常、激光光斑异常等;
3)导弹部件工作异常:包括导引头工作异常、弹上计算机工作异常、陀螺仪工作异常、弹上电源工作异常、舵机工作异常等[3]。
依据外弹道曲线,可以计算出导弹飞行需要的俯仰视线角速度信号,计算原理如图2所示。
图2 俯仰视线角速度信号计算原理图
根据外弹道数据提供的导弹位置M(Xm,Ym)和目标位置T(Xt,Yt),通过如下公式计算出导弹飞行需要的俯仰视线角信号((°))和俯仰视线角速度信号((°)/s)[4]:
俯仰视线角:
俯仰视线角速度:
式中:T为采样时间。
根据记录的导引头OK1、OK2信号,按照如下公式计算出导引头输出的俯仰视线角速度信号((°)/s):
计算的故障弹飞行需要的俯仰视线角速度与计算的导引头实际输出的俯仰方向视线角速度对比曲线如图3所示。
图3 飞行需要的俯仰视线角速度与导引头实际输出的俯仰方向视线角速度(OKy)
由图3可见,认为故障弹掠靶高飞的原因是导引头输出的视线角速度不能反映弹道实际需要的视线角速度。经进一步分析认为该故障的产生原因为:1)导引头输出斜率散布在某些环境使用条件下异常偏大;2)导引头跟踪能力在某些环境使用条件下异常下降。
文中仅针对导引头输出斜率散布异常,对导引头输出斜率温度补偿算法进行阐述。
1.2 导引头输出斜率散布偏大造成掠靶高飞机理
某型激光导引头制造与验收规范中关于输出斜率的表述如下:视线角速度1 °/s时导引头输出信号1.65 V,在常温(20 ℃)状态下误差为(±1.65)×10%。然而从测试数据可以看出:导引头在不同温度状态下,输出斜率的散布范围偏大,在-20 ℃、-40 ℃状态下,导引头输出斜率误差甚至超出(±1.65)×25%的范围。
将导引头输出斜率设置在不同的区间,引入控制系统设计要求中规定的各种误差源,进行蒙特卡洛仿真分析[5],仿真结果见表1。
表1 蒙特卡洛仿真结果
由表1可见:当导引头输出斜率固定设置为1.237 5时,导弹命中概率为89.1%,蒙特卡洛仿真导弹落点散布如图4所示,当导引头输出斜率偏低时,导弹命中点散布向靶面正Y方向偏移,对导弹命中概率带来不利影响,出现掠靶高飞的故障风险。
图4 蒙特卡洛仿真导弹落点散布图
因此亟待研究一种适合导引头全温度范围输出斜率补偿的数学算法,确保导引头输出斜率的期望稳定,可确保导弹命中概率的进一步提高。
2 导引头输出斜率补偿算法研究
2.1 问题描述及解决思路
激光导引头测量并提供导弹与目标之间瞄准线角速度信息,导引头输出斜率作为导引头测量精度的最重要的特性指标之一,在工程实际中,该指标随着温度变化往往存在着一定的分布规律。例如在常温状态(+20℃)导引头输出斜率为X1±(X1×10%),高温状态(+50℃)导引头输出斜率为X2±(X2×10%),低温状态(-40℃)导引头输出斜率为X3±(X3×10%),X1、X2、X3之间的分布规律可通过大量的工程测试得到。
工程应用中,对于需要实现相同的导弹与目标相对运动的寻的制导弹道,首先设计确定的导航比N[6],通过相同的导航比N,来达到统一的比例导引效果。假使在相同的导弹与目标相对运动的弹道条件下,瞄准线角速度变化规律相同,但是由于激光导引头输出斜率会随温度而变化,其测量的瞄准线角速度信息却并不相同,相当于改变了预先设计的比例导引规律导航比N的大小,得到的比例导引结果必然产生差异,严重时,会导致比例导引系数过大或过小。同时,该类型导弹末制导段通常会引入过重力补偿策略或落角控制策略,以提高导弹命中目标时的弹着角,由于导引头输出斜率散布偏大,改变了比例导引规律的导航比N后,导弹的飞行弹道偏离设计的弹道规律,导弹的命中点散布中心发生偏移,导弹命中目标时的弹着角也发生变化,这些变化很可能导致导弹脱靶。
目前该类型激光半主动导弹武器系统,对导引头输出斜率散布特性,未采用工程归一化算法处理,仅仅通过设计具有很强冗余度的导航比N,保证在一定的导引头输出斜率散布范围内,导弹依然能够命中目标,但是该方案在工程实践中已经逐步暴露出其固有的缺陷,因此文中提出了下述导引头温度补偿算法[7]。
2.2 算法步骤
1)首先进行各温度点导引头输出斜率测试,确定-40 ℃、-20 ℃、0 ℃、20 ℃、50 ℃温度特征点的导引头输出斜率K-40、K-20、K0、K20、K50的统计值。
2)0℃以下,根据3个温度特征点-40 ℃、-20 ℃及0 ℃下的导引头输出斜率K-40、K-20、及K0可按如下方法确定一条抛物线:

式中:
C1=c1×10 000=K0×10 000
Th为导弹温度,单位:℃;Kq2,cz为任意温度下导引头输出斜率值。
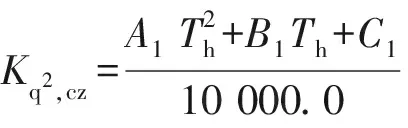
3)同理,0 ℃以上,根据3个温度特征点0 ℃、20 ℃及50 ℃下的导引头输出斜率K0、K20及K50可确定如下一条抛物线:
其中:
C1=c1×10 000=K0×10 000
其中:Th为导弹温度,单位:℃;Kq2,cz任意温度下导引头输出斜率值。
4)假设设计比例导引回路导航比N时,应用的导引头输出斜率Kq2为20 ℃条件下的导引头输出斜率为1.65,则在任意温度条件下对导引头输出斜率按如下公式进行温度补偿。
任意温度下的导引头输出斜率温度补偿系数OKxz及相关参数见表2[8]。
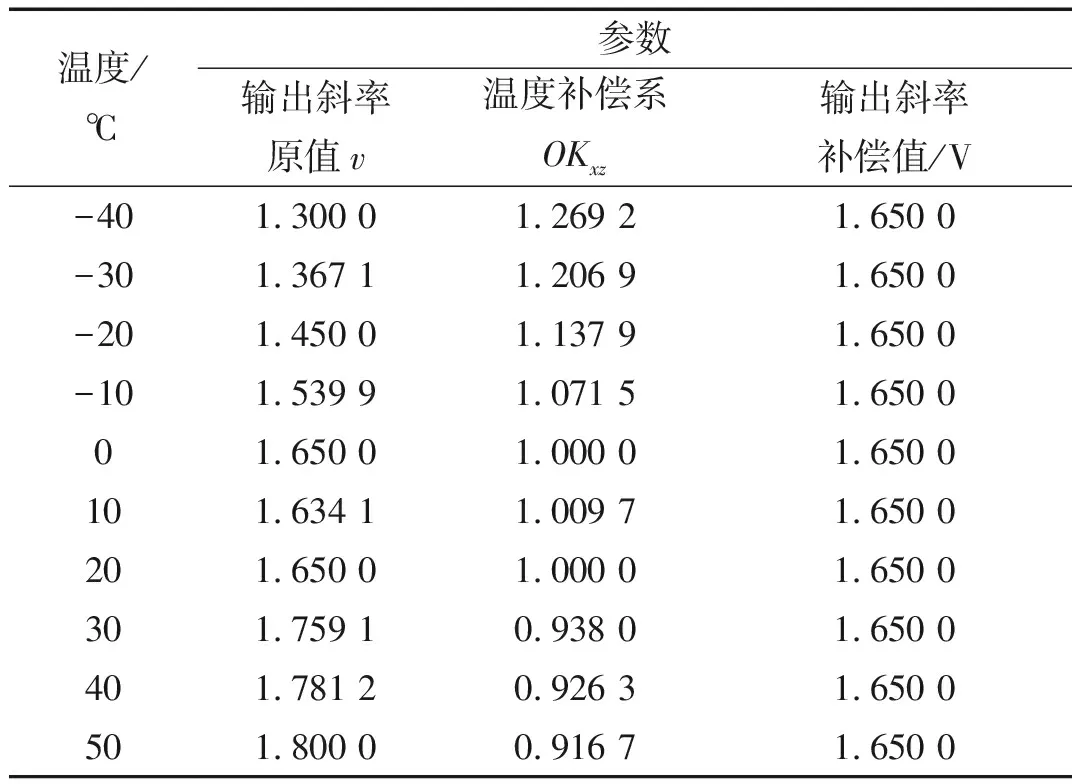
表2 导引头输出斜率温度补偿系数
3 温度补偿算法仿真结果
空地导弹比例导引回路设计结构如图5所示,采用温度补偿算法后的导引头输出斜率如图6所示。

图5 比例导引回路原理图

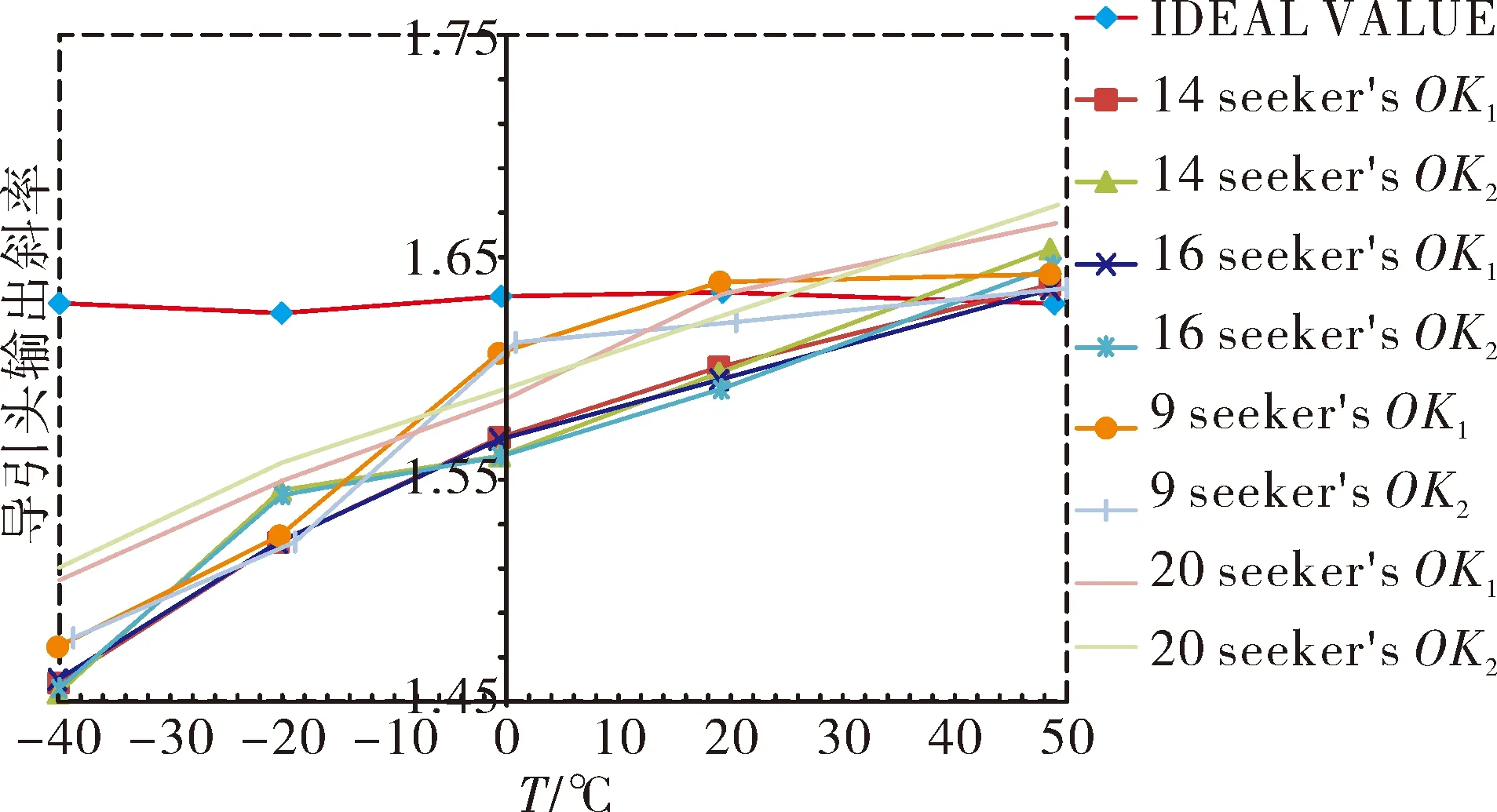
图6 温度补偿算法后导引头输出斜率
经温度补偿归一化后,导引头输出斜率补偿到设计技术要求的常温中值附近,经蒙特卡洛数学仿真计算,导弹命中点散布规律如图7所示,采用温度补偿后导弹命中点散布中心趋于中心。
4 结论
文中首先确定了导弹掠靶高飞故障的原因是在某些环境使用条件下导引头输出斜率散布偏大和导引头跟踪能力异常下降引起的,然后针对导引头输出斜率散布偏大的现象,提出了一种温度补偿算法,可有效降低导引头输出斜率散布,将导引头输出斜率补偿到常温中值1.65±(1.65×10%)范围内。经数学仿真、半实物仿真及飞行试验验证,采取该温度补偿算法,可有效解决导弹掠靶高飞问题,提高该武器系统的综合作战性能。
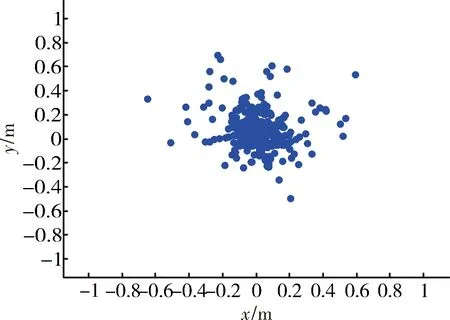
图7 导弹命中点散布
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
导航与控制(2019年2期)2019-06-12
雷达科学与技术(2019年2期)2019-05-18
新课程·中旬(2019年3期)2019-05-10
中学课程辅导·教师通讯(2018年10期)2018-09-04
农村农业农民·B版(2017年11期)2017-12-06
中学生数理化·高一版(2017年3期)2017-07-08
作文周刊·小学一年级版(2017年14期)2017-06-22
