
基于改进型有限时间LQR的平衡车控制研究
2019-09-10 00:22刘锐军谢广明罗文广
广西科技大学学报 2019年2期
关键词:Matlab仿真
刘锐军 谢广明 罗文广


摘 要:针对平衡车启动及停止时发生抖动的问题开展了相应的研究.通过建立系统动力学模型,设计了系统的改进型有限时间LQR(LQR, Linear Quadratic Regulator)控制器;对系统矩阵及控制矩阵进行改进,增加小范围增量矩阵,系统能够实现自适应调节,并使最优控制率在小范围内可调,进而使性能指标达到最佳;通过仿真计算并选取最佳的加权矩阵[Q]和[R],使性能指标达到最优.仿真实验表明该方法具有可行性和实用性,解决了小范围不稳定情况,有效克服了超调量过大而引起的不稳定.
关键词:线性二次型;加权矩阵;最优控制器;MATLAB仿真
中图分类号:U489;TP273 DOI:10.16375/j.cnki.cn45-1395/t.2019.02.005
0 引言
平衡車是电动车的一种,市场上的平衡车主要分为独轮和双轮两种,其关键技术是动态稳定控制.就双轮平衡车而言,传统的平衡车是靠陀螺仪和加速传感器来检测车体的姿态变化,同时用伺服控制系统来驱动电机以确保系统的稳定.1985年日本提出了两轮平衡车的模型,经过21世纪初的一个快速发展期,多个国家对该模型进行优化改进研究,主要有美国、日本、瑞士和法国等,直到2005年日本发布了“村田顽童”自行车机器人,该模型有了质的飞跃.国内关于平衡车的研究起步较晚,主要集中在高校,如:清华大学、西北工业大学等高校.目前平衡车的快速发展,也大力支持高校与企业之间合作及共同开展项目研究.
平衡车是在新产品的迭代创新过程中改进的.双轮平衡车在启动和停止时会出现抖动不稳的现象,需要一种控制方法来解决该问题,以确保其安全性.经典的线性二次型调节器LQR是一种具有较好鲁棒性的控制器,其研究对象是现代控制理论中以状态空间形式给出的线性系统,而性能指标函数为对象的状态和控制输入的二次型函数.LQR问题之所以受到普遍重视是因为它的应用不局限于某种物理系统,具有普遍意义且鲁棒性较强.LQR最优控制器设计主要是求出状态反馈控制的增益[K],使二次型性能指标函数J取最小值,而[K]由加权矩阵[Q]和[R]唯一决定,故此[Q]和[R]的选择尤为重要.本文将LQR控制器进行改进,以解决小范围不稳定情况.该方法应用到双轮平衡车上可以精确地检测车身偏移角度,并结合精密的中央处理器下达指令使陀螺仪能够及时调整车身角度,从而达到平衡控制[1].
1 双轮平衡车系统建模
1.1 系统模型建立
双轮平衡车简称移动机器人.近几年研究的移动机器人有很多种类,包括:仿生的爬行机器人、类似动物运动的四脚机器人以及装甲车式的履带爬楼机器人等.这些机器人的发展为人们带来了实际效益,同时也带来了很大的方便.双轮平衡车在实际生活当中应用最广泛,例如,大型运动场、大型商场的治安员等都会用到双轮平衡车来快速达到短距离目的地[2-3].
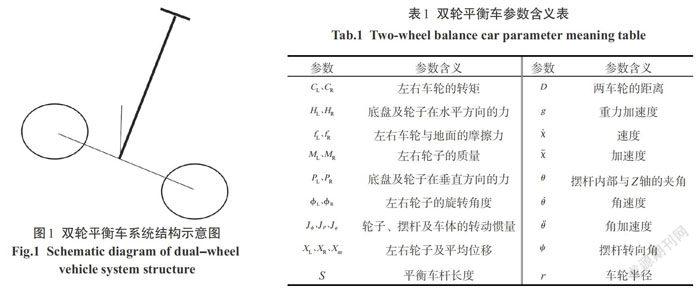
由于轮式机器人要比足式或爬行机器人的速度要高,因此需要轮式机器人在运动控制上具有较高的精度.这就要求控制器在设计上采用高性能控制策略,使其能够在运行过程中进行准确的定位.以下根据平衡车结构建立系统模型,分析其动力学模型,并建立动力学方程[4-5].
1.1.1 对车轮建模
左、右车轮力学方程及转动惯量为:
[MLXL=fL-TL], [JLφL=CL-fLr] (1)
[MRXR=fR-TR], [JRφR=CR-fRr] (2)
1.1.2 对摆杆建模
①水平方向的平衡方程为:
[mxP=TR+TL] (3)
其中,[xp=xm+Ssinθ],[xp=xm+S(θcosθ-θ2sinθ)]
[xm=xL+xR2] (4)
②转矩方程为:
[JPθ=S(PR+PL)sinθ-S(TR+TL)cosθ] ; (5)
③垂直方向的平衡方程为:
[mxZ=-mg+PR+PL] (6)
其中,[xZ=S(cosθ-1)],[xZ=S(θ2cosθ-θsinθ)]
④平衡车在转弯时的平衡方程为:
[Jψψ=(TR+TL)D2] (7)
[ψ=-xR+xLD] (8)
⑤兩轮平衡车的数学模型为:
[CR+CLr=xm(2Jϕr2+2M)-mSθ] (9)
[-mLxm=θ(mS2+JP)-mgSθ] (10)
[-CR+CLr=ψ(DM+2JψD+DJϕr2)] (11)
由式(9)—式(11)可得平衡车系统方程如下:
[xxθθ=0001a210000010a41000θxθθ+b11b12b21b220000CRCL] (12)
[ψψ=0100ψψ+b11b1200CRCL] (13)
由于本動力学方程有两个角度,必须满足一定的条件才能成立,式(9)—式(11)是在假设当[θ]在[±5∘]变化时([±5∘]变化是指平衡车内部IMU检测摆杆内部机械的偏差,而非平衡车摆杆的倾斜度或车身的倾斜度.因IMU模块检测比较灵敏,故若检测值偏离太大,反映在摆杆及车身的角度远大于偏离值,因此[±5∘]符合要求),[sinθ≈θ],[cosθ≈1]成立,满足该条件,从而[θ2≈0].
在平衡车中控制系统是关键的部分,整个车身的运行情况都由控制系统实现,因此,精准的控制系统设计是平衡车安全与否的关键.因为设计简单便捷,市面上大多平衡车采用PID算法来控制.该算法应用到平衡车上,虽然能够很好的利用其闭环系统实现控制,但在精准控制上难以保证,因此迫切需要一种控制器来实现精准控制.LQR控制器以其易于构成闭环系统、设计简单及能够较好的实现最优控制目的的优点,成为平衡车设计控制器的新方法.本文对LQR控制器进行了改进,增加微量调节反馈矩阵,使其能够对启动及停止时的微小抖动问题实现良好的控制.
2 平衡车LQR控制器设计
LQR即线性二次型调节器,LQR可以得到状态线性反馈的最优控制规律,易于构成闭环最优控制,可在不消耗过多能量的情况下,保持系统状态各分量仍接近平衡状态.LQR最优控制充分发挥成本低这一特点,使其原系统达到较好的性能指标,也可以对不稳定系统进行调整.线性二次型问题解出的控制率可以通过状态反馈实现闭环最优控制,成为当今控制工程领域中主要设计方法之一.
由于目前很多平衡车在启动和停止时出现不可控制的抖动现象,导致车身不稳,对人身安全造成一定的危险,因此,本设计采用自加调节式系统控制,利用微小调节矩阵检测偏移角度,从而矫正偏移量,使平衡车能够在整体倾斜角度范围内,通过自加调节式系统克服角度差,使车身能够在偏离一定角度后立刻得到矫正.
2.1 传统设计方案
状态调节器的任务在于,当系统状态由于任何原因偏离了平衡状态时,能在不消耗过多能量的情况下,保持系统状态各分量仍接近于平衡状态.在研究这类问题时,通常是把初始状态矢量看作扰动,把零状态取作平衡状态.因此,需要解决的问题是,寻求最优控制率[u]矩阵,在有限时间内将系统初始状态转移到零点附近.平衡车系统在当前状态由于任何原因偏离了平衡状态时,要在最短时间内,保持系统状态各分量仍接近于平衡状态,尤其在外部干扰情况下要求系统状态转移到零点附近.其系统满足最优控制的线性二次型调节器.
①系统状态方程为:
[x(t)=A(t)x(t)+B(t)u(t)x(t0)=x0y(t)=C(t)x(t)] (14)
②性能指标为:
[J=12eT(tf)Fe(tf)+12t0tf[eT(t)Q(t)e(t)+uT(t)R(t)u(t)]dt] (15)
其中,[A(t)]称为状态矩阵,[B(t)]称为控制输入矩阵,[C(t)]称为输出矩阵,[x(t)∈Rm];[u(t)∈Rm],无约束;[y(t)∈Rl],[0<l≤m≤n];输出误差向量[e(t)=z(t)-y(t)],[z(t)∈Rl],为理想输出向量,要求确定最优控制[u∗(t)],使性能指标[J]取得极小值[6-7].在系统方程(14)和二次性能指标式(15)中,如果[C(t)∈I],[z(t)=0],则有:
[e(t)=-y(t)=-x(t)] (16)
那么將式(16)代入式(15)得性能指标为:
[J=12xT(tf)Fx(tf)+12t0tf[xT(t)Q(t)x(t)+uT(t)R(t)u(t)]dt] (17)
式(17)即为状态调节器的性能泛函.
构造哈密顿函数(Hamilton)
[H[x,u,λ,t]=12[xT(t)Q(t)x(t)+uT(t)R(t)u(t)]+λT[A(t)x(t)+B(t)u(t)]] (18)
从而得到:
[u∗(t)=-R-1(t)BT(t)P(t)x(t)=-K(t)x(t)] (19)
其中,[K(t)=R-1(t)BT(t)P(t)],[P(t)]可以通过黎卡提(Riccati)微分方程来计算.
[P(t)=-P(t)A(t)-AT(t)P(t)+P(t)B(t)R-1(t)BT(t)×P(t)-Q(t)] (20)
式(17)中加权矩阵[Q是n×n]维半正定矩阵,[R是r×r]维正定矩阵;第一个积分项表示系统动态跟踪误差加权平均和的积分;第二个积分项表示系统控制能耗总量. LQR最优控制器设计主要是求出状态反馈控制的增益[K],使二次型性能指标函数[J]取最小值,而[K]由加权矩阵[Q]和[R]唯一决定,故此[Q]和[R]的选择尤为重要.在本设计平衡车控制器中[Q]和[R]的选取主要取决于工程上的调试及结构设计,一般根据设计要求的不同来选择[Q]和[R]的大小从而加以约束状态量及控制量.
2.2 改进型的设计方案
①系统状态方程为:
[x(t)=A+ΔA1(t)x(t)+B+ΔB1(t)u(t)x(t0)=x0y(t)=C1(t)x(t)] (21)
其中,[A]和[ΔA1]为相同维数的矩阵,[B]和[ΔB1]也为相同维数的矩阵,[ΔA1]与[ΔB1]为不确定性矩阵,而这两个矩阵分别是在外界干扰时所产生的,通过调节[ΔA1]与[ΔB1]来确定系统的稳定[8].增量矩阵[ΔA1]与[ΔB1]是通过平衡车的IMU检测后反馈系统的差值,根据差值适当增加[ΔA1]与[ΔB1]矩阵以达到稳定的目标.增量矩阵不是无限随意增加,根据平衡车抖动的范围设定增量矩阵的界限,因此在检测到偏差值后反馈给系统即可以确定增量矩阵大小,从而调节系统稳定性.
②相应的[u∗(t)]及[P(t)]如下:
[u*(t)=-R-1(t)B+ΔB1T(t)P(t)x(t)=-K1(t)x(t)] (22)
[P(t)=-P(t)A+ΔA1(t)-A+ΔA1T(t)P(t)+P(t)B+ΔB1(t)R-1(t)B+ΔB1T(t)×P(t)-Q(t)] (23)
3 仿真实验及分析
3.1 仿真实验数据选择
式(24)—式(25)中,系统矩阵:[A+ΔA1];输入矩阵:[B+ΔB1];输出矩阵:[C1];输入向量:[u];状态向量:[X];输出向量:[Y].
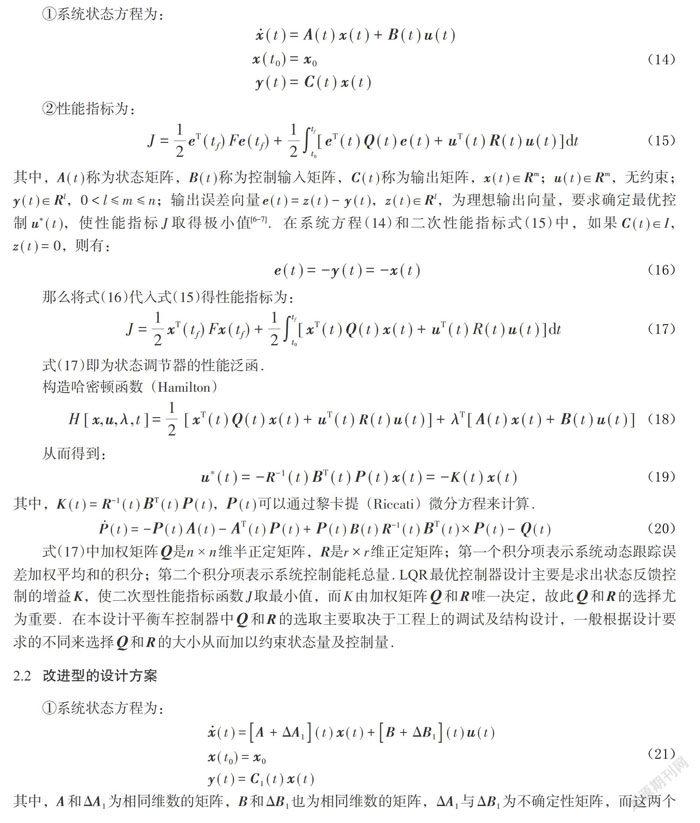
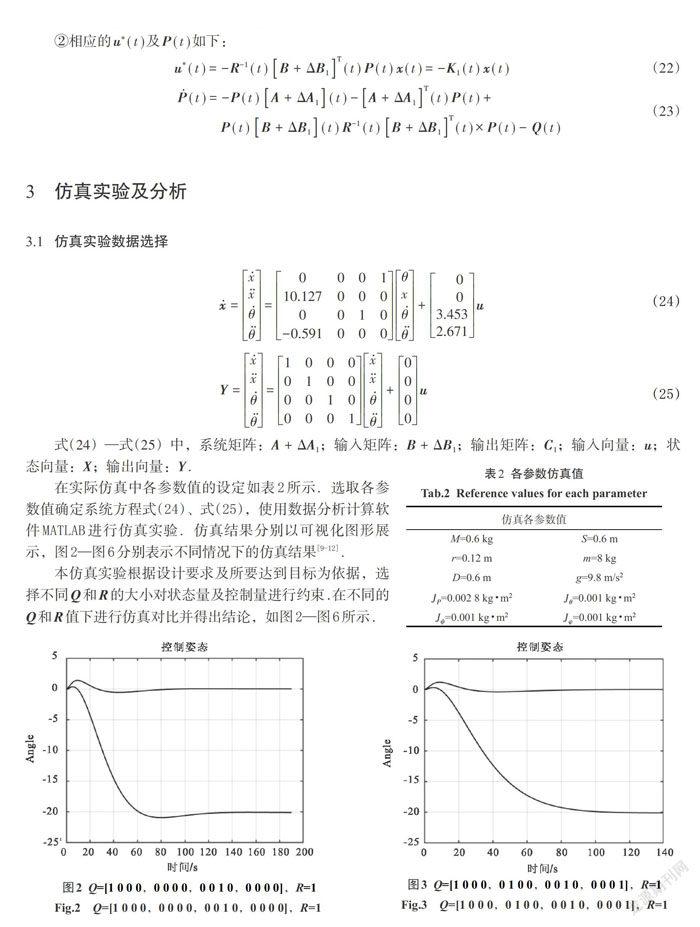
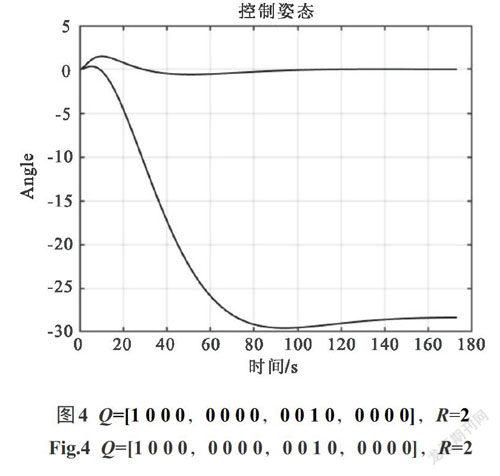
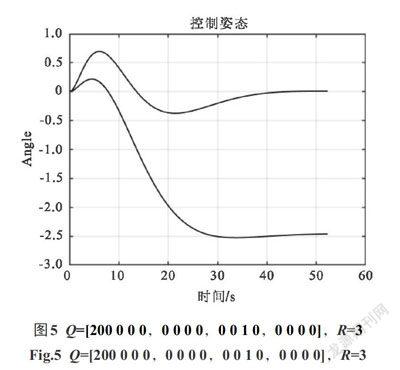
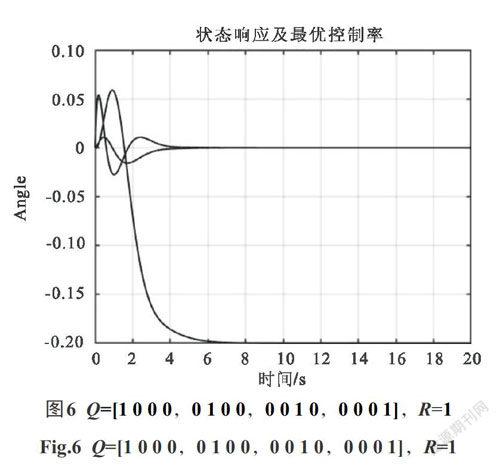
在实际仿真中各参数值的设定如表2所示.选取各参数值确定系统方程式(24)、式(25),使用数据分析计算软件MATLAB进行仿真实验.仿真结果分别以可视化图形展示,图2—图6分别表示不同情况下的仿真结果[9-12].
本仿真实验根据设计要求及所要达到目标为依据,选择不同[Q]和[R]的大小对状态量及控制量进行约束.在不同的[Q]和[R]值下进行仿真对比并得出结论,如图2—图6所示.
3.2 仿真结果分析
由以上仿真实验得知:解决双轮平衡车在启动与停止时小范围抖动的问题,关键在控制器的设计,控制器的参数值是控制效果的直接决定因素.仿真中可以得出,改进型的控制器只要选定合理的参数就可以实现较短时间内达到稳定状态.图2和图4代表加权矩阵[Q]相同而加权矩阵[R]不同的情况.从图中可以看出在加权矩阵[Q]相同[R]不同时:当[R]越小,摆杆的摆幅偏离中心方向越小,而且到达稳定时间较短,并且[R]越小,会出现小范围的超调量,但很快就恢复正常.图2和图3代表加权矩阵[R]相同[Q]不同的情况.这种情况下改变[Q]的单一向量会消除超调量,并且在控制摆幅相等时,稳定时间会更短.图5表明同时选择较大的[Q]和[R]会使平衡车出现明显的超调量,而且稳定性无法得到控制.图6是经过调试后确定的[Q]和[R]值,并得到的状态响应及最优控制曲线.图中可以看到平衡车在发生抖动时能够很快得到控制并趋于稳定,控制效果很好,在该条件下[K]=[-12.541 9, -1.000 0, 20.282 2, -22.626 8].通过实验仿真验证了该方案的可行性,即:增加小范围偏移防抖动矩阵有效解决了双轮平衡车在启动及停止时刻出现小范围抖动的问题.
4 结束语
大量的仿真结果表明,当在系统中引入可调节控制矩阵时控制效果比传统的效果好,并且可以较为简单的实现调节功能.本文利用力学知识对平衡车进行系统建模,计算出系统方程;通过黎卡提(Riccati)微分方程来计算,从而得出P(t),进而计算出反饋矩阵.另外,在控制过程中[Q]和[R]的选取对控制效果有明显的影响,而且二者是相互制约的关系,改变其中任何一个都会有较大影响,在多次试验后选取了最优控制的加权矩阵[Q]和[R].文中虽然达到了控制效果,但还需改善达到最优控制的时间,才能使系统更加快速的达到稳定状态,该方案将在实际工程中具有很好的参考与指导价值.
参考文献
[1] 朱年华.两轮自平衡电动车控制系统设计与研究[D].南昌:华东交通大学,2016.
[2] 牛伯冕.线性最优控制方法及其在旋转倒立摆中的应用分析[J].自动化与仪器仪表,2018(2):183-186.
[3] 杨正才,吕科.基于模糊PID控制方法的两轮直立自平衡电动车研究[J].控制工程,2016,23(3):366-370.
[4] 薛凡,孙京诰,严怀成.两轮平衡车的建模与控制研究[J].化工自动化及仪表,2012,39(11):1450-1454.
[5] 申铁龙,梅生伟,王宏,等.鲁棒控制基准设计问题:倒立摆控制[J].控制理论与应用,2003,20(6):974-975.
[6] 段广仁.线性系统理论[M].2版.哈尔滨:哈尔滨工业大学出版社,2004.
[7] 張晓亮,罗文广.汽车主动悬架系统的线性二次最优控制研究[J].广西工学院学报,2011,22(4):44-48.
[8] 刘爱民,梁亚茹.基于修正型线性二次最优控制的PID参数优化方法及其应用[J].组合机床与自动化加工技术,2007(11):36-39.
[9] 周加全,罗文广,李亮,等.仿生机器鱼位姿模糊控制研究[J].广西科技大学学报,2017,28(2):17-22.
[10] 谢超艺,罗文广,张午昀,等.基于AD5435的永磁同步电机矢量控制系统仿真[J].广西科技大学学报,2015,26(2):8-13.
[11] PRASAD L B,TYAGI B,GUPTA H O.Optimal control of nonlinear inverted pendulum system using PID controller and LQR: performance analysis without and with disturbance input[J].国际自动化与计算杂志(英文版),2014,11(6):661-670.
[12] ENDERLE J D,WOLFE J W. Time-optimal control of saccadic eye-movements[J].IEEE Transactions on Biomedical Engineering,1987,34(1):43-55.
Design of optimal controller for balanced vehicle based
on improved LQR
LIU Ruijun1, XIE Guangming2, LUO Wenguang*1
(1.School of Electric and Information Engineering, Guangxi University of Science and Technology, Liuzhou 545006, China;2.Engineering School, Peking University, Beijing 100871, China)
Abstract: In this paper, a systematic study is made on the jitter problem of balancing vehicle when starting and stopping. The improved LQR (LQR, Linear Quadratic Regulator) controller is designed by establishing the system dynamics model. The system matrix and control matrix are improved to increase the matrix of small range increment, the system realizes the adaptive adjustment, and the optimal control rate is adjustable in a small range so as to achieve the best performance index. The improved method solves the small-scale instability and effectively overcomes the instability of the overshoot. We can find the Q and R values that make the best performance by the simulation calculation of different Q and R. Through the simulation calculation and selecting the appropriate weight matrix Q and R, the performance index is optimized. Simulation experiments show that the method is feasible and practical.
Key words: linear quadratic; weighted matrix; optimal controller; MATLAB simulation
猜你喜欢
现代情报(2016年11期)2016-12-21
科学与财富(2016年26期)2016-12-01
科技视界(2016年21期)2016-10-17
电脑知识与技术(2016年12期)2016-06-14
电脑知识与技术(2016年9期)2016-05-18
考试周刊(2016年11期)2016-03-17
现代电子技术(2015年17期)2015-09-23
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年10期)2015-05-29
无线互联科技(2015年2期)2015-04-02
