
运输类飞机最小离地速度试飞设计与风险控制
2019-09-10 18:42屈飞舟刘静
航空科学技术 2019年1期
关键词:风险控制
屈飞舟 刘静
摘要:最小离地速度是民用运输类飞机制定起飞特征速度的关键。最小离地速度试飞是民用运输类飞机最大性能起飞的试验机动,是在地面效应影响下的飞机低速大迎角试飞科目,试验难度大、风险高,对试飞技术、试飞组织和试飞驾驶技术要求很高。目前国内仅有新支线飞机按照民用航空规章进行了相关试验。研究了民用运输类飞机最小离地速度试飞的类型和理论,对运输类飞机最小离地速度试飞中的关键技术和风险控制方法进行了深入研究,可供所有类型运输类飞机最小离地速度试飞借鉴使用。
关键词:最小离地速度;试飞方案;尾橇;适航,风险控制
中图分类号:V217.3 文献标识码:A
最小离地速度(氏u)是民用运输类飞机制定起飞速度和保障飞机安全起飞的的关键速度,新研制的飞机必须按照适航规章的要求进行最小离地速度试飞。在军用运输类飞机飞行试验中引入适航管理理念,需要进行最小离地速度试飞,而最小离地速度是飞机在大迎角状态下离地获得的,试飞风险高,难度大,试飞员将其比喻为“刮胡刀刮脸”,飞机上安装的尾橇系统就是“刮胡刀”,跑道就是“脸”,国际上能玩好这把刮胡刀的试飞员不超过10个。最小离地速度试飞方案如何设计、风险如何控制就成了试验能否成功的关键研究点。
1 最小离地速度试飞类型
最小离地速度试飞中,飞机加速到特定速度时,试飞员拉杆使飞机抬头,飞机保持最大迎角状态直至离地起飛。飞机最小离地速度的试飞类型与飞机的几何特性、失速特性和升降舵操纵效能相关。图1给出了飞机升力系数CL随迎角α变化的典型曲线。图中θ为俯仰角。
若飞机抬前轮后,可以达到图1中1点的升力系数,而飞机尾部还没有接地,飞机迎角不能再继续增大,否则飞机还未离地就已经失速。这种类型飞机的最小离地速度受失速限制。该类型的飞机极少。
若飞机抬前轮后,达到图1中2点的升力系数位置,还未到达起飞构型下的最大升力系数,同时飞机的尾部已经接地,飞机的抬头姿态无法继续增大,则这种飞机的最小离地速度是受飞机几何结构(尾部擦地)限制的。该类型的飞机较为常见。
第三种类型是飞机的俯仰操纵权限达到最大,飞机还没有达到尾部触地的状态,同时也未达到最大升力系数位置,即图1中3点的位置,此时飞机的最小离地速度受俯仰操纵权限限制。
2 最小离地速度理论分析
最小离地速度试验要求准确确定飞机离地时的校正空速。分析飞机离地时的受力状态,在航迹坐标系下,飞机在纵向平面内的动力学方程为[1]:
当飞机离地时,动力学方程应当满足如下条件:式中:T为发动机推力;W为飞机重力;γ为航迹角;αmu为最小离地速度对应的迎角;φp为发动机安装角;CLmu为飞机以最小离地速度起飞时对应的升力系数;q为动压;S为机翼参考面积。
航迹角γ很小,约为零,则式(2)可变为:
最小离地速度试飞各推重比试验点在不同的试验重量下进行,导致不同推重比的最小离地速度试飞结果并不存在一定的线性规律,因此需要引入基准失速速度VSR,对最小离地速度试飞结果进行规一化处理,同时更容易进行起飞速度的符合性分析。式中:VSR为参考失速速度;CLmax为参考失速速度对应的升力系数。
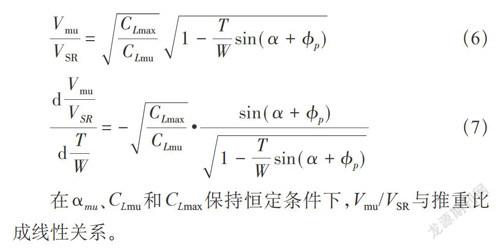
将式(5)代入式(4),可得:
在αmu、CLmu和CLmax保持恒定条件下,Vmu/VSR与推重比成线性关系。
3 适航条款分析
为了防止飞机在起飞时出现机尾擦地的情况,适航规章要求在飞行试验中要进行过早抬前轮起飞、过度抬前轮起飞、过早过度抬前轮起飞,过早过度过快抬前轮起飞和最大可用速率抬前轮起飞,在各种试验情况下检查申请人制定的起飞速度和起飞程序是否足够安全[2]。
最小离地速度是制定起飞特征速度的基础。在适航规章中对最小离地速度的要求为该速度为校正空速,在等于和高于该速度时,飞机可以安全离地并继续起飞。最小离地速度必须在申请审定的整个推重比范围内由申请人选定。在制定飞机的抬前轮速度(VR)时,要求飞机如果在VR速度上以实际可行的最大抬头率抬头,得到的离地速度(VLOF)将不小于全发工作Vmu的110%,且不小于按单发停车推重比确定的Vmu的105%[3]。对适航条款的总结如图2所示。适航条款通过这种安全裕度要求,确保飞机在起飞离地过程中与地面之间有足够的间隙,以保障起飞的安全性。
4 试验方案设计
4.1 试验重量重心的选择
从第二节的理论分析可知,最小离地速度与飞机的推重比近似呈线性关系,试飞时需要改变飞机的推重比进行。控制推力和控制飞行重量都可以实现推重比的改变,所以原则上试验重量可以任意选择。但是现代运输类飞机的最小飞行重量和最大起飞重量之间的间隔很大,仅仅通过燃油量的改变无法覆盖飞机的推重比范围,往往重量的改变需要在试飞中调整飞机配重来实现,试验的成本和进度都会受到很大影响。因此,国内外飞机进行该项试飞时通常都采用改变推力的方法进行。即在飞机建立大仰角起飞姿态前,将飞机的油门杆收到特定的位置,实现推重比的调整。
重心位置主要影响飞机的静稳定性,飞机前重心时静稳定性好,为使飞机达到可能的最大抬头姿态,作用在平尾上的向下的空气动力就要大。对于静稳定的飞机来说,由于平尾的空气动力与机翼的升力方向相反,在相同姿态角时,前重心离地所需机翼的升力大,即当重量和离地姿态相同的情况下,前重心的离地速度要大些,因此,从适航角度考虑,在重心前限进行最小离地速度试飞得到的结果更为保守,安全性更高。如果试验时重心不在前极限,或者因为飞机在重心前限下达不到最大可能姿态(受俯仰操纵权限限制的飞机),则可以在稍后一点的重心进行试验时,但条例允许的重心允差范围是飞机整个重心范围的±7%[4]。在其他重心位置进行的试验,其结果必须进行修正。试验状态的升力系数采用下式进行修正:其中:CLmubz为修正到标准重心位置的最小离地速度对应的升力系数;CLmubz为试验重心时的最小离地速度对应的升力系数;Lt为水平尾翼力臂;CGbz为标准重心位置;CGsj为实际重心位置。
对于飞机前限变化比较复杂的情况,为了在重心的前极限位置进行试验,试飞的重量就不是任意选取的,必须与飞机的重心相匹配。
4.2 最小推重比的确定
咨询通告AC25-7C中要求,如果飞机的起飞速度在大推重比情况下受最小离地速度的限制,则需要进行包含一发不工作的最大推重比和全发工作的最大推重比两种状态的试飞。如果飞机的起飞速度在小推重比情况下受最小离地速度的限制,则需要进行包含一发不工作的最小推重比和全发工作的最小推重比两种状态的试飞。
最小离地速度试飞的风险很高,因此条例允许使用全发工作模拟一发不工作情况下的推重比。即便如此,使用全发工作模拟一发不工作情况下的最小推重比仍然具有较高风险。
图3中A点和B点分别是飞机一发不工作状态的最小推重比和最大推重比,C点和D点分别是飞机全发工作的最小推重比和最大推重比。A1点是使用全发工作模拟的一发不工作的最小推重比。A1点和A点之间的差值是考虑飞机一发不工作引起的阻力增加造成的。
通过对飞机一发不工作的极曲线和全发工作的极曲线试验结果进行分析,可以得到飞机一发不工作的阻力增量随偏航力矩的变化关系曲线,如图4所示。计算一发不工作时的偏航力矩,然后從曲线中查得一发不工作造成的阻力系数增量,计算阻力的增加量。使用全发工作模拟一发不工作的推重比时,全发工作的推力值需减去阻力增量,因此使用全发工作进行模拟时,试验的推重比更小一些[5]。
全发模拟试验的推重比确定后,需要在空中先以确定的推力和预测的最小离地速度进行起飞一阶段和二阶段的爬升梯度检查,确保飞机在进行最小离地速度试飞时能够安全起飞离地。如果推重比不满足适航条款的最低要求,则最小推重比的试验需受飞机爬升梯度的限制。
4.3 纵向配平的选择
当表明飞机受俯仰操纵权限限制时,咨询通告允许使用比正常情况更大的飞机抬头配平进行试验。在最小离地速度试飞时,与正常的配平量相比,使用更大的抬头配平可以使飞机更早抬头,飞机达到预定姿态更早,从而使试飞员调整俯仰操纵到飞机离地之间的时间间隔更长,提高试验的成功率。对于受几何结构限制的飞机,在开始进行试验时应首先使用正常起飞配平,在已经表明飞机不受俯仰操纵权限限制时,可以使用更大的抬头配平优化试飞操作程序[6]。
4.4 离地信号的判断
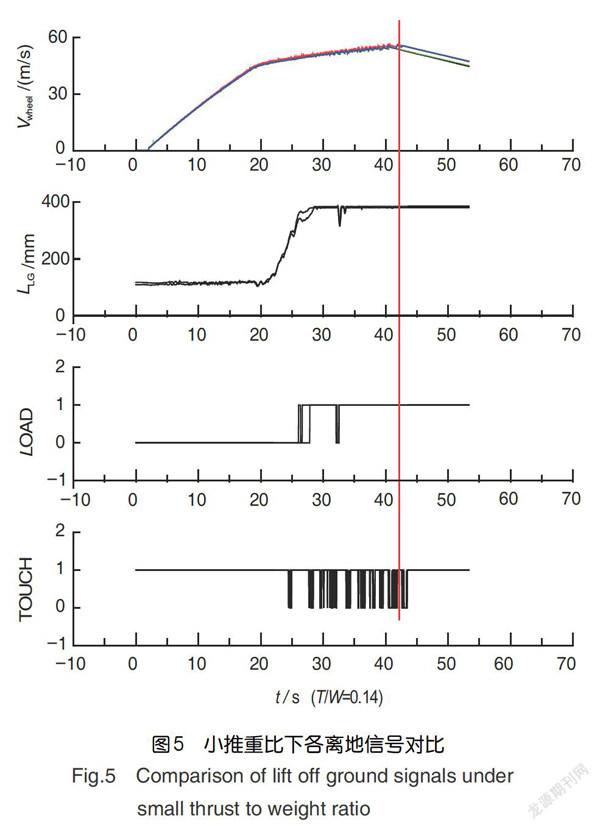
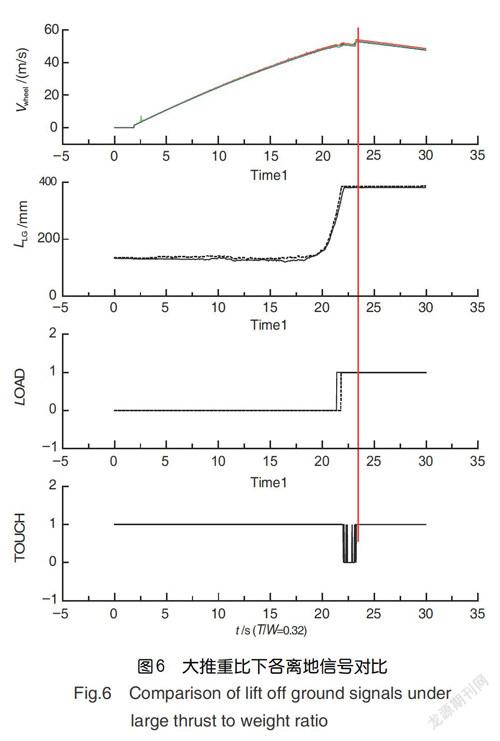
通常机轮载荷、起落架缓冲支柱位移和机轮轮速信号被用来作为飞机离地点的判断信号[7]。不同的试验对飞机离地点的判断精度要求不同,最小离地速度试飞要确定一个基准速度用于制定飞机的起飞特征速度,判断飞机离地点就变得尤为重要。图5和图6给出了不同推重比状态下各种信号的对比。图中参数从上到下依次为轮速、起落架缓冲支柱位移、轮载信号和尾橇擦地信号。
通过对不同推重比状态下各种信号进行对比分析,轮速与尾橇擦地信号较为一致,随着推重比的不同,4个参数之间的相互变化关系发生了明显变化。当推重比较小时,缓冲支柱全部伸展和轮载消失后,飞机并没有离地,轮速还在增加,尾橇擦地显示飞机没有离地。当推重比较大时,缓冲支柱位移和轮载与轮速和尾橇擦地信号才较为一致。因此,轮速是确定飞机离地点的重要参数,而起落架缓冲支柱位移和轮载信号不能用于飞机离地点的判定。
5 风险控制研究
5.1 风险分析
最小离地速度试飞中,飞机在近地面保持大迎角姿态离地,可能导致飞机尾部擦地和低空失速两大风险,尾部擦地会损伤飞机结构,而低空失速直接会导致机毁人亡的重大事故。同时在小推重比试验中,发动机功率小,所需的起飞距离长,而此时又由于飞机姿态角很大,试飞员的视野受限,很难看到跑道正前方,因此在该试验中飞机也有冲出跑道或偏出跑道的风险。针对试飞员视野受限问题,在该试验中,需要事先调高座椅的位置,同时副驾驶或观察员时刻关注飞机的状态,根据需要及时增大发动机功率,可以避免飞机偏离或冲出跑道。
对于低空失速的风险,首先要设置好飞机失速保护系统的状态,保留副驾驶一侧的失速告警,既可以提醒机组飞机所处的状态,又避免了告警对主驾驶操纵的影响。主驾驶在飞机离地过程中对飞机俯仰角速度和滚转的控制也极为重要,离地瞬间较小的俯仰和滚转姿态变化可以避免飞机进入复杂的运动状态。
尾部擦地是最小离地速度试飞中最主要的风险点,后文对此风险的控制进行了详细分析。
5.2 尾撬设计
最小离地速度试飞中最大的风险点是飞机尾部擦地损伤,图7为某型飞机进行最小离地速度试飞时尾部擦伤情况。
飞机加装了尾橇用于保护机体结构。但还是出现了尾部擦伤的情况。选取A380飞机最小离地速度试飞进行比较研究,图8中(a)为A380飞机,(b)为尾部擦伤的飞机。对两者进行比较发现,当尾橇触地时,后者的尾部最低点已经几乎接近地面,当飞机离地时,俯仰姿态进一步增加,就极可能出现尾部擦伤的情况。观察两者的尾部结构,可以看出,A380飞机的尾部呈圆锥状,曲面没有向下弯曲,而后者的尾部有向下弯曲,这种情况在飞机设计上是应该极力避免出现的。
通常要求尾橇装机后,飞机最大俯仰角的减小量不超过0.5°[8],尽量减小尾橇对飞机最小离地速度的影响,获得最大的飞机性能收益。对于图8(b)中的飞机,在进行尾橇设计时要考虑飞机的特点。适当增大尾橇结构,当尾橇擦地时飞机尾部离地面有足够的间隙。在性能损失可接受的情况下,确保飞行试验的安全。
另外,由于尾橇在触地过程中会产生大量的热量,并迸出火花,因此在选择尾橇材料时,要求材料具有耐磨性好,导热差,具有阻燃特性[9]。
5.3 离地俯仰姿态的控制
对于受几何结构限制的最小离地速度,一般期望在尾部触地瞬间飞机俯仰角速度近似为零,以避免由于尾部重接地带来的结构损伤现象。但是,不同推重比的最小离地速度试飞,从拉杆建立姿态、尾部触地调整操纵到飞机离地整个过程中的时间间隔均存在差异,因此,这会给试飞员操作带来很大的难度。
试验推重比较小时,飞机滑行加速度较小,尾部触地到飞机离地之间的时间间隔相对较长,通常有5~10S,此时试飞员可以回杆调整纵向操纵,消除尾部触地时重接地的现象。
试验推重比较大时,滑行加速度较大,尾部触地到飞机离地之间的时间间隔通常只有2~3s,如果此时要求试飞员较早地回杆修正,以降低尾部触地的俯仰角速度,可能存在没有达到尾部触地飞机就已经离地[10]。因此,大推重比的最小离地速度可能存在尾部重接地和飞机没有达到尾部触地就已经离地两种现象之间的矛盾。
因此,对于大推重比的最小离地速度试飞,考虑可以使用能够实现推重比的最大重量,以便尽力增加飞机离地速度,保证尾部触地到离地之間具有足够的加速时间,减轻试飞员进行操纵调整的难度。同时可以采用连续接地起飞的方式训练试飞员在滑跑阶段保持一定俯仰角的能力,实践证明,这是一种十分高效的最小离地速度驾驶技术训练方法。
6 结束语
本文分析了最小离地速度与飞机推重比的关系和最小离地速度对起飞速度制定的影响。对试飞中可能出现的飞机尾部擦地、低空失速以及偏出跑道等风险进行了详细分析,重点剖析了尾部擦地造成结构损伤的原因,以及如何通过加装尾橇系统和控制离地姿态的试飞技术来缓解风险。针对影响试飞结果的关键技术点,制订了相应的试飞方案,对后续运输类飞机进行最小离地速度试飞具有参考价值。
参考文献
[1]张妙蝉,张建,吴密翠.运输类飞机最小离地速度试飞数据处理方法[J].飞行力学,2011,29(5):81-96.
[2]刘静,郗超.民用运输类飞机最大可用速率抬前轮试飞技术研究[J].航空科学技术,2015,26(5):44-47.
[3]CCAR-25-R4中国民用航空规章第25部运输类飞机适航标准[S].2011.
[4]EAA.AC25-7C Flight test guide for certification of transportcategory airplanes[S].2012:23-28.
[5]杨洪平,王立新,李勤红.民机最小离地速度的工程计算方法[J].飞行力学,2006,24(2):9-12.
[6]张建.飞机最小离地速度试飞设计和风险控制技术[J].飞行力学,2014,32(6):549-556.
[7]Sligerland R.Minimum unstick speed impact on horizontal tailsizing for jet transports[C]//AIAA 2005-815,43rd AIAAAerospace Sciences Meeting and Exhibit,Reno,Nevada,2005.
[8]张建,屈飞舟,刘静.受结构限制的运输类飞机最小离地速度试飞技术[J].飞行力学,2012,30(5):458-462.
[9]陈明太,刘立苏.民用飞机最小离地速度试飞实施方法研究[J].民用飞机设计与研究,2013,110(3):12-40.
[10]屈展文,张彤,揭裕文.最小离地速度合格审定飞行试验优化方法研究[J].飞行力学,2016,34(6):90-94.
猜你喜欢
法制博览(2016年11期)2016-11-14
企业导报(2016年19期)2016-11-05
时代金融(2016年23期)2016-10-31
经营者(2016年12期)2016-10-21
经营者(2016年12期)2016-10-21
经营者(2016年12期)2016-10-21
商(2016年27期)2016-10-17
企业导报(2016年13期)2016-07-19
企业导报(2016年8期)2016-05-31
企业导报(2016年9期)2016-05-26
