基于工控网关架构的无人机机舱设备故障诊断方法
2019-11-08 06:01徐东黄海艇刘典勇苏道静
粘接 2019年9期
徐东 黄海艇 刘典勇 苏道静


摘要:文章提出了一种基于工控网关架构的无人机机舱设备故障诊断方法,具体介绍了系统的硬件、软件组成,并对该方法的工作原理和实现方法进行了介绍。结果显示当无人机机舱设备发生故障时,该方法可准确地诊断故障,提高无人机的安全性和自动化程度。
关键词:工控网关;无人机;故障诊断
中图分类号:V241 文献标识码:A 文章编号:1001-5922(2019)09-0102-07
近年来,无人机因操作简单、工作效率高等特点广泛地应用于航拍、农业、军事等领域。无人机系统通常由飞行控制系统、动力系统、GPS导航系统、无线电台传输系统以及其它任务系统组成。无人机系统工作时,可同时完成多项任务,当机舱内部发生故障时,轻则影响无人机飞行作业的精度,重则导致无人机系统失灵,出现坠机事故。现有的无人机系统发生故障时,约90%的故障检测和诊断过程都在飞行控制器中完成,该过程在无人机系统工作时会占用一部分内存,影响系统工作。当前无人机故障的诊断基本依赖于事后工程师的经验性分析,然而支持分析工作的信息仅限于发生故障造成的结果以及机舱设备可能保存的一些警告信息等,开展无人机机舱设备诊断工作困难并且需要花费大量时间才能诊断出故障发生的原因。
工控网关作为物联网和工控系统的核心组件,使用不同的通信协议、数据格式或语言、在相同或者不同结构的两种体系之间进行数据的移动,是目前最复杂的网络互连设备,工控网关在自动控制系统中起着承上启下的作用。由于工业现场的设备通讯通常都遵守一定的规约格式,这些规约其实由大量的国际工业巨头制定的标准,他们发布这些标准,一方面是为了实现自己产品才有的特色,另一方面,也是为了更多地推广自己生态链内的产品。常见规约都是跟着PLC走的,比如施耐德:modbus,西门子:Profibus/Profinet,罗克韦尔:DFl/EthernetIP,三菱:CCLink等。但是在工业现场涉及的产品种类非常多,使用的协议也不相同,然而设备和设备,系统和系统之间一定有相当多信息要互相沟通,才能达成整体自动化。因此,工控网关把不同的语言转换成同一种语言,这样整个系统才能达成统一。
因此文章結合现有的无^机机舱设备诊断技术,提出了一种基于工控网关的无人机机舱设备故障诊断方法,该方法由故障发生的分系统发送无人机通用故障代码到飞行控制器中,飞行控制器解译故障代码,并与标准故障代码库中的代码匹配,查找并显示出该故障代码对应的诊断信息,使用工控网关技术能够自动进行搜集故障信息和提供诊断结果。该方法在一定程度上提高了无人机机舱设备诊断系统的安全『生和自动化程度。
1.故障诊断工作原理
1.1无人机机体模型
1.3电量
目前市场上的无人机大多数采用锂电池作为动力来源,锂电池在工作过程中,电压会随着放点过程逐渐降低,并且电压变化率也会随着电池电量的变化而变化。通过搜集不同型号的锂电池,统计了额定电压为12V的锂电池在放电过程中的电压变化,结果如图1所示。
诊断系统首先根据接收的电池参数确定电池的电量和类型,同时计算当前已消耗的电量。为保证无人机的作业安全,当无人机电池电量低于额定电压的30%时,就向系统发出报警信号,系统根据警告信号进一步的对电池故障进行检测,当剩余电量大于5%时发出报警。另外当无人机电量充足的过程中,检测无人机的飞行姿态角,姿态角度大于70°时,表明无人机飞行不稳定,有坠机危险,并及时向系统发出报警信号。
1.4飞控系统故障
2.系统组成
针对无人机作业过程中常见的故障问题,文中提出了一种基于工控网关的故障诊断系统,对无人机机舱设备故障进行诊断,该系统的硬件组成如图3所示。便携式的工控计算机作为总线控制器,同时外接各种总线仪器,便于现场诊断过程中显示和输出诊断结果。
2.1硬件模块
工控网关作为物联网和工控系统的核心组件,使用不同的通信协议、数据格式或语言、在相同或者不同结构的两种体系之间进行数据的移动,是目前最复杂的网络互连设备,工控网关在自动控制系统中起着承上启下的作用。文章将Modbus Master通信协议用于工控网关中,物理端口支持RS485。便携式工控机采用Intel core i78700型,内存为64GB。主要完成无人机机舱设备故障诊断过程中的故障信息的存储、数据分析整理、解译故障代码并生成诊断维修报告。工控机还对传回的数据进行分类处理,同时完成对数据的分析,包括频谱分析和波段分析等,最后显示检测和诊断的结果,也可以完成人机交互功能。
二通道的智能数据采集卡用于对无人机发送的数据波形、时序在线监视和测量,以及完成对接受的信号进行频谱分析和波段分析,并将分析结果储存。该数据采集卡的采样频率为50MHz,分辨率为6bit,带宽为20MHz。
通用信号测试卡主要用于对无人机上各种电信号检测,主要包括陀螺仪信号、各旋翼电机信号、气压传感器信号、GPS信号、飞行参数信号(飞行高度、飞行速度和航向角等)、电源电压参数等,这些信号主要以电压、电流、电阻和逻辑测试档等形式出现。为满足不同机型的无人机在各种环境下测试,采用适配器来满足对无人机各个接插口的实时监测。
2.2软件模块
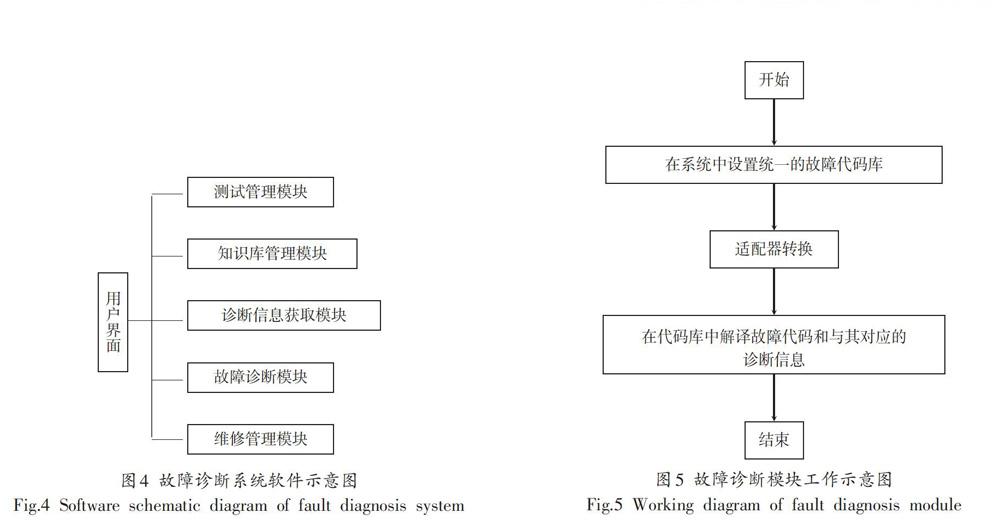
基于工控网关的无人机机舱设备故障诊断系统的软件采用模块化思想设计,主要包含有测试管理模块、知识库管理模块、诊断信息获取模块、故障诊断模块以及维修管理模块。软件的工作示意图如图4所示。
测试管理模块主要完成对智能数据采集卡和通用信号测试卡等的管理,通过测试无人机的各种性能指标参数、波形及时序分析,并实现对信号的储存和分析。知识库管理模块主要由规则库、故障树模型库、故障事例库以及维修资料库组成。该模块为知识库的建立和维护提供开放式的操作。即用户可方便地对这些库进行输入、修改、添加、删除及浏览操作。用户通过搜集无人机作业故障的诊断信息,通过对上述的库进行添加操作,丰富库资源,提高无人机故障诊断的精度。诊断信息获取模块由数据采集,征兆数据库和交互获取三部分组成,通过自动和交互两种方式获取与诊断推理有关的信息。有些信息可通过自动测试平台自动获取,对于难于获取的信息可以通过专家分析后才能获得的信息则必须通过交互方式得到。
故障诊断模块由框架推理、模型推理和规则推理三部分组成。它根据获得的故障信息首先进行框架推理,启动故障征兆对应的系统级框架,然后启动相应的故障搜索树模型框架,进而进行规则推理,直至将故障定位到可更换的位置。故障诊断模块工作流程图如图5所示。维修管理模块主要是将每次故障诊断与维修的结论生成维修情况报告表,如果故障征兆数据库中没有本次故障征兆,则将本次故障作为事例存人事例数据库。用户界面则是为了方便实现人机交互功能,用户可根据界面上的引导选择相关功能,系统根据用户的选择试验相应的功能。
2.3故障诊断结果
无人机机舱设备故障诊断软件在Windows7环境下采用C#语言在Microsoft Visual Studio中编程开发的。Microsoft Visual Studio(简称VS)是美国微软公司的开发工具包系列产品,VS是一个基本完整的开发工具集,它包括了整个软件生命周期中所需要的大部分工具,如UML工具、代码管控工具、集成开发环境(IDE)等。故障诊断软件采用模块式设计,用户可根据自身需要选择相应功能。
为检测故障诊断软件的灵敏度和诊断精度,进行了相关的试验验证。实验中,采用四旋翼无人机作为测试无人机,无人机的相关参数如表1所示。
试验过程中分别设置了无人机常见的三种故障类型,分别是恒增益故障、恒偏差故障和卡死故障,分别测试不同故障类型情况下系统特性与正常运行情况下的系统特性对比。同时为了验证所提出的基于工控网关的无人机机舱设备故障诊断方法的有效性,使用Matlab2016的Simulink插件進行仿真试验,通过对无人机机舱相关设备进行施加故障,并输出仿真结果。
当无人机系统无故障时,仿真结果如图6所示。
由图中曲线可得,当无人机系统无故障时,故障标志为0,作动器实际输出与解析输出变化趋势一致,残差基本为零,系统工作状态正常。
当对无人机系统施加信号产生卡死故障时,输出的仿真结果曲线如图7所示。由图7中曲线可知,当无人机系统发生卡死故障时,实际输出与解析输出变化趋势不同,随着步数的增加,残差值逐渐变大,故障标志由正常状态下的0变为1。由仿真结果可看到,无人机在第210步时发生卡死,系统诊断出故障时的采样步数为215步,由此可推算出系统诊断出卡死故障的时间为0.05s。
当对无人机系统施加恒增益故障时,仿真时设置的增益变化值为0.5,输出的仿真结果如图8所示。
由图8中的曲线可知,当系统发生恒增益故障时,实际输出与解析输出出现偏差,残差值的变化趋势为先增大后减小,故障标志由正常状态下的0变为故障标志1。仿真结果显示,恒增益故障发生在215步,当故障诊断系统检测到故障时,采样步数为218步,因此可推算出,故障诊断系统检测时间为0.03s。
仿真时,对无人机系统施加恒偏差故障信号时,仿真结果如图9所示。
由图9中的曲线可知,无人机系统发生恒偏差故障时,实际输出与解析输出变化趋势不同,残差值迅速变化,并稳定在-1左右,因此表明恒偏差的度数为1度。故障标志位由正常状态的0变化为故障标志1。输出结果显示,系统接收到恒偏差故障时的步数为220步左右,当诊断系统检测到恒偏差故障时的采样步数为225步,由此可推算故障诊断系统的响应时间为0.05s。
为检测系统诊断故障的准确率,试验一共进行了20组试验,并统计了每次试验的准确率,准确率曲线如图10所示。
由图10中曲线可知,20次重复试验的诊断准确率都在96%以上,表明所设计的无人机机舱设备故障诊断系统可准确的诊断出无人机系统的故障。
3结语
基于工控网关技术开发了无人机机舱设备故障诊断系统,该系统利用工控网关技术可同时对飞行控制系统、动力系统、GPS导航系统、无线电台传输系统以及其它任务系统的接口信号快速、准确地进行波形、时序以及电参数等测量分析。结合故障诊断库系统,通过对故障信号解译获取故障信息,并给出诊断结果和解决措施,该系统具有较强的故障诊断能力,经过仿真测试可知,系统诊断故障的准确率高于96%,表明系统稳定可靠、准确性良好。另外基于c#语言的人机交互界面,可实现人机友好交互,采用适配技术,具有良好的通用性和可扩展性。该系统为便携式系统,方便实时对无人机系统进行检测,当无人机出现故障时,快速准确诊断出结果,并在报警前给出处理方法,有效避免了无人机飞行风险,在无人机领域有一定的发展前景和发展潜力。
猜你喜欢
今日自动化(2022年1期)2022-03-07
科学与财富(2020年3期)2020-04-02
科学导报·学术(2019年14期)2019-09-10
振动工程学报(2019年2期)2019-05-13
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
现代电子技术(2009年15期)2009-09-30