基于改进LSD和AP聚类的路径边缘识别策略
2019-11-13 07:25刘璧钺赵章焰
图学学报 2019年5期
刘璧钺,赵章焰
基于改进LSD和AP聚类的路径边缘识别策略
刘璧钺,赵章焰
(武汉理工大学物流工程学院,湖北 武汉 430063)
起重机金属结构攀爬机器人的路径边缘识别策略分为3个步骤。①图像预处理,利用改进的过颜色算子进行灰度化;②使用基于支持向量机(SVM)最优分类线的方法确定梯度阈值,并增设主方向角约束,改进线段分割检测(LSD)算法,得到直线段检测图像;③对直线段进行特征提取,构建聚类数据集,基于数据集动态变化的特点,将基于先验信息的判别模型与近邻传播(AP)聚类算法相结合,改进AP聚类算法,对直线段进行聚类,筛选出构成路径边缘的直线段,并拟合得到最终的路径边缘线。实验结果表明,相较AP聚类和其他聚类算法,改进AP聚类算法的筛选准确率最高;基于改进LSD和AP聚类的路径边缘识别策略的识别成功率为96%,且满足精度和实时性要求。
边缘识别;过颜色算子;LSD;SVM;特征提取;AP聚类
目前,国内外对起重机的检测主要依靠人力攀爬完成,风险大、效率低。因此,开发应用于大型起重机械的攀爬机器人,可降低对起重机保养、维护、检测的风险,提高工作效率。大型起重机的金属结构总体尺寸大,颜色单一,如图1所示。

图1 大型起重机械
攀爬机器人的路径识别对象主要是起重机金属结构等结构化路径。目前常见的结构化路径识别研究包括公路车道线识别[1]、变电站巡检机器人导引路径识别[2]、AGV小车导引路径识别[3-4]、智能汽车赛道识别[5]等。上述结构化路径具有显著特点:背景颜色单一,路径处于二维平面内,环境干扰较少,路径表面缺陷较少,路径颜色和地面背景颜色差别较大,故其边缘更易于识别。
相较于上述常见的位于二维平面上的结构化路径,金属结构路径处于三维空间中,环境与背景更为复杂多变,路径表面缺陷更多,导致路径图像中的干扰直线段更多,路径边缘提取更为困难。结合起重机金属结构路径的特点,本文提出一种基于改进线段分割检测(line segment detector, LSD)算法和近邻传播(affinity propagation, AP)聚类算法的路径边缘识别策略。整体流程如图2所示。
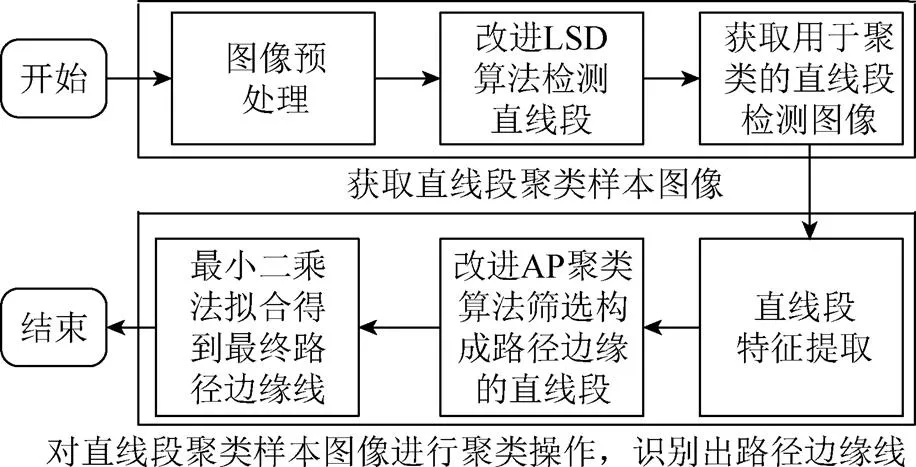
图2 识别策略流程图
LSD算法的目标在于检测图像中局部、平直的轮廓,对于被遮挡或局部模糊的路径边缘线,经常会被割裂为多条短直线。因此,需从LSD算法检测得到的所有直线段中,剔除干扰直线段,筛选出构成路径边缘的直线段。本文基于支持向量机(support vector machine, SVM)最优分类线的方法确定梯度阈值,并增设梯度阈值和主方向角约束,改进LSD算法,降低检测出的干扰直线段数量。
由于直线段检测图像始终随路径图像动态变化,因此难以确定合适的直线段特征,使其在不同图像中,均能稳定且准确地区分路径边缘线和干扰直线段。常见的基于特征约束和机器学习的路径边缘识别方法[6-7]不适用于本研究。
基于此,本文对每一幅直线段检测图像,提取合适的直线段特征,采用聚类算法,将特征相似的路径边缘线聚为一类并进行筛选。同时,基于聚类数据集动态变化的特点,将基于先验信息的判别模型与AP聚类相结合,改进AP聚类算法[8-9]。该算法无需调节参数,聚类结果准确度高、实时性强,可实现自适应聚类,适用于动态变化的聚类样本。
1 图像预处理
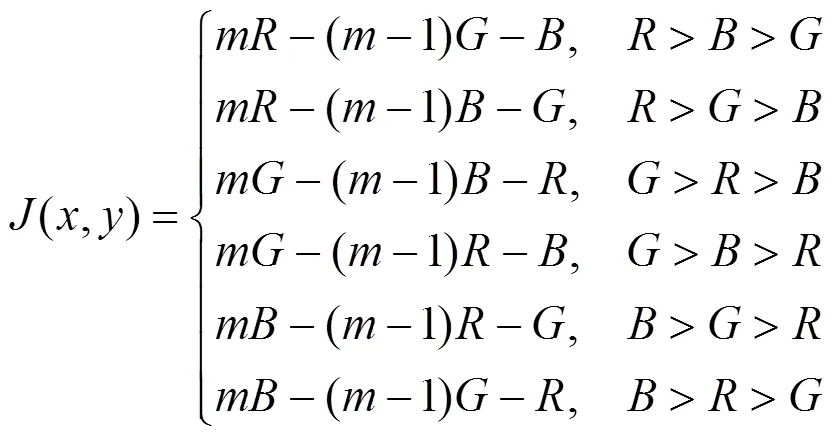
基于金属路径显著的颜色特征,本文通过构建RGB颜色空间下的过颜色算子对路径图像进行灰度化,过颜色算子用于凸显具有明显颜色特征的前景区域。通过确定需要凸显的颜色特征,将其对应的颜色分量记为主颜色分量,让每个像素点的主颜色分量减去其他颜色分量,并保证主颜色分量的权值绝对值等于其他颜色分量的权值绝对值之和。记(,)为像素点(,)处的灰度值,传统过颜色算子灰度化的公式为

其中,算子、算子和算子分别对应于凸显彩色图像中的红色、绿色和蓝色区域。
本文在传统过颜色算子的基础上进行改进。不仅考虑路径区域像素点的主颜色分量,还将其余2种颜色分量细化为更小的次颜色分量和最小的末颜色分量。根据3种颜色分量的相对大小关系,将主、末、次颜色分量的权值依次设为(>2)、–(–1)、–1。这样不但保证了主颜色分量的权值绝对值等于其余颜色分量的权值绝对值之和,而且通过增大被减数的权值,增大较小的减数权值,降低较大的减数权值,进一步提升了路径区域灰度值,增大了路径区域和背景区域的灰度差异,从而增大了路径边缘处梯度值,有利于路径边缘线的检测。改进过颜色算子灰度化的公式为
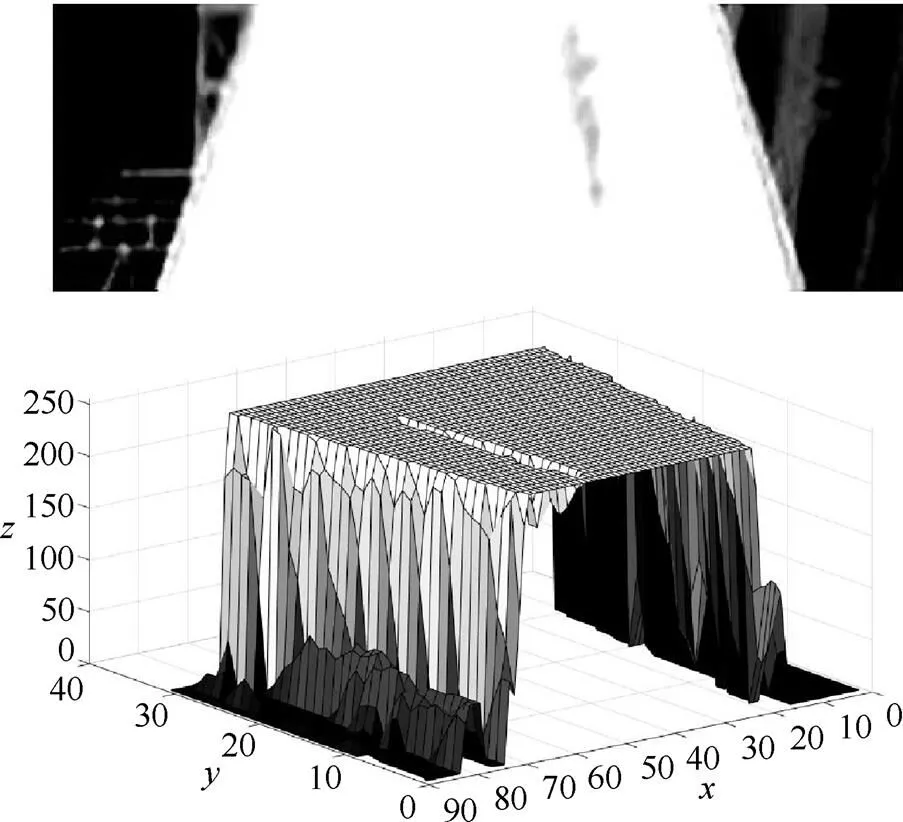
起重机金属结构路径表面存在漆面脱落、金属锈蚀、漆面污渍、光照阴影等表面缺陷区域,这些缺陷区域具有和路径区域相同的主颜色分量,只是分量值较低,因此在灰度图中表现为暗区域,其边缘梯度会导致干扰直线段的误检测。适度增大值可有效提升暗区域的灰度值,削弱暗区域,降低其边缘梯度值,如图3所示。
对于削弱后的暗区域,其边缘梯度远远小于路径边缘梯度,如图3中的三维灰度图所示。故通过增设梯度阈值约束,可消除由金属路径表面缺陷导致的干扰直线段。
2 路径边缘线识别
得到经预处理的路径灰度图之后,需用边缘检测算法得到直线段检测图像。相比于传统的Sobel,Log,Canny等边缘检测算法,LSD算法精度更高,处理速度更快且无需调节参数;同时,LSD算法可输出每条直线段在像素坐标系下的斜率k、截距b、端点的像素坐标及长度参数,便于获取用于聚类的直线段特征,如图4所示。因此本文采用LSD算法检测直线段。
然而,起重机金属结构错综复杂,背景区域往往会出现和路径区域具有相同颜色特征的非路径金属结构;同时,路径表面存在各种表面缺陷。因此,由LSD算法得到的直线段检测图像会包含很多干扰直线段。本文需提出一种路径边缘线识别策略,准确筛选出构成路径边缘的直线段。
2.1 LSD算法基本原理
LSD是一种直线分割检测算法[10]。该算法基于每个像素点的梯度方向和梯度幅值,通过约束规则,对满足约束的像素点进行区域生长,生成线支持区域,作为直线段检测的候选对象。通过线支持区域的最小外接矩形,可判定该线支持区域是否为一个直线段。

(a)=3
(b)=4
(c) m=5

图4 输出直线段参数
2.2 改进LSD算法
传统LSD算法中,满足要求的线支持区域被检测为直线段。因此,本文对线支持区域增设梯度阈值和主方向角约束,改进LSD算法[11-12],有效降低传统LSD算法检测出的干扰直线段数量。
2.2.1 梯度阈值约束
图像预处理后,削弱了常见金属表面缺陷造成的暗区域,增大了暗区域边缘与路径边缘的梯度差值。本文通过增设梯度阈值,消除上述暗区域边缘造成的干扰直线段。像素点梯度值按照2×2的掩模计算,像素坐标系下,记像素点(,)处的灰度值为(,),梯度值(,),即

其中,
梯度阈值应大于暗区域边缘处像素点的梯度值,小于路径边缘处像素点的梯度值。梯度值小于的像素点被拒绝参与线支持区域的构建,从而使输出的直线段不包含暗区域边缘干扰直线段。
通过将灰度图像转换为梯度图像,可利用大津阈值法自适应地确定每一幅梯度图像的梯度阈值。但由于大津阈值法是一个基于图像全局的阈值分割方法,确定时,考虑了梯度图像中大多数梯度值为0的像素点,故得到的极小,无法保证大于暗区域边缘处的梯度值。
因此,基于暗区域边缘和路径边缘梯度值的巨大差异,本文提出一种基于二分类SVM最优分类线的方法确定,使其能适用于所有图像。共有400幅训练集路径图像,在获取训练数据时,只需获取每一幅图像中,使暗区域造成的干扰直线段全部消失的最小梯度阈值U,使路径边缘线开始消失的最小梯度阈值H。通过得到分割和两类数据的最优分类线,确定。步骤如下:
步骤1.获取训练集数据。由于LSD算法可设置梯度阈值,故本文采用从小到大遍历梯度阈值的方法,对LSD的梯度阈值参数由小到大进行取值,观察直线段检测图像的结果,从而确定每一幅图像对应的U和H。
步骤2.添加标签。所有U构成集合U,将U内所有数据的类别标签设为–1;所有H构成集合H,将H内所有数据的类别标签设为1。则训练数据集={(1,1), (2,2),···,(800,800)},=(1,2),1为训练集图像标号,2为U和H包含的梯度阈值,∈{–1, 1}。
步骤3.用训练SVM,得到能将U和H分开的最优分类线。图5中黑线为SVM确定的最优分类线,圈出的数据点为支持向量。令为最优分类线中点对应的梯度阈值。
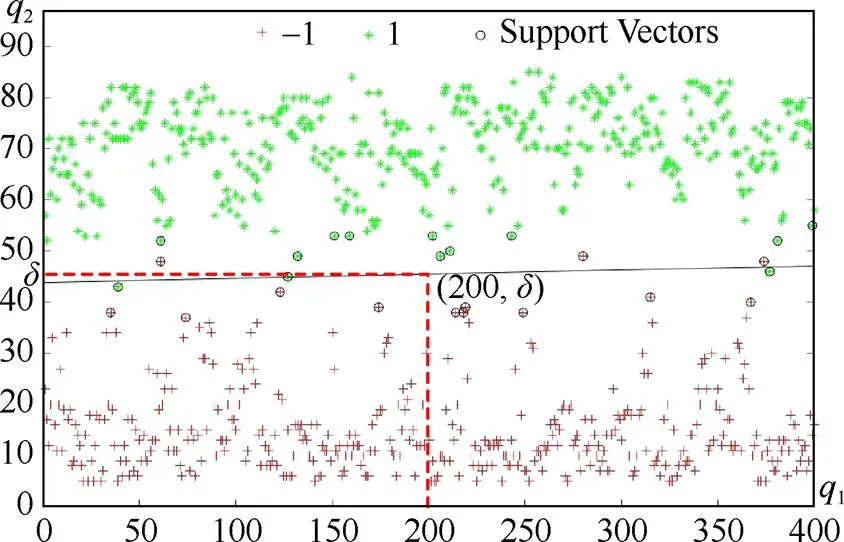
图5 SVM分类图像

={|为支持向量在训练数据集中的下标},将1=200代入式(4),解得2== 45.84。
基于SVM最优分类的思想,梯度阈值能实现对U与H两类数据的最佳分割,并具有最大分类间隔。由此得到的可保证使暗区域干扰直线段全部消失的同时,不影响路径边缘线的检测。
通过梯度阈值约束,路径区域内部因表面缺陷导致的干扰直线段被有效抑制,从而使检测出的干扰直线段都位于路径边缘线外的背景区域,并作为先验信息构建判别模型,改进AP算法。
2.2.2 主方向角约束
本文将LSD算法中,线支持区域最小外接矩形的主惯性轴方向作为其对应的直线段朝向。通过将主惯性轴方向角约束于指定角度范围,可使LSD算法检测出的直线段倾角均位于上述范围,改进LSD算法。基于此,通过将路径边缘线倾角所在范围作为角度约束范围,可剔除与路径边缘线倾角差异较大的干扰直线段,降低其数量。设右、左路径边缘倾角约束范围为[1,2]、[3,4]。
通过将线支持区域看做一个实体,其内每个像素点的梯度值作为像素点的质量,整个实体的质心作为最小外接矩形的中心点。记线支持区域为,其内像素点的坐标为(x,),梯度值为(x,y),则矩形的中心点(c,c)为
矩形的主惯性轴方向为矩阵的最小特征值对应的特征向量角度为
记特征值和2维列向量=(1,2)T,使



2.3 平面位置约束
由于构成左路径边缘的直线段不会整体位于中轴线右侧;构成右路径边缘的直线段不会整体位于中轴线左侧。因此,通过约束直线段端点的横坐标,使所有<0的直线段均整体位于中轴线左侧,>0的直线段均整体位于中轴线右侧,剔除图6(a)中的绿色干扰直线段2,得到图6(b)。
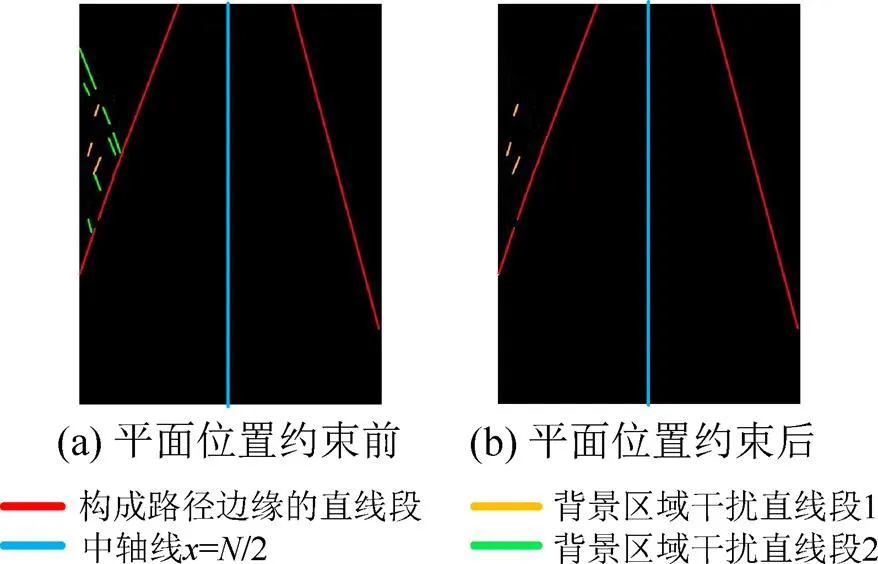
图6 平面位置约束检测图像
2.4 直线段聚类
经梯度阈值、倾斜角和平面位置约束后,显著减少了LSD算法检测出的干扰直线段数量,干扰直线段均位于路径边缘线外侧的背景区域,且和同侧路径边缘线的斜率正负相同,并位于约束范围内,得到最终用于聚类的直线段检测图像,定义为聚类样本图像,如图6(b)所示。
2.4.1 直线段特征提取
结合LSD算法输出的直线段参数,对于每一幅聚类样本图像,将位于中轴线左、右两侧的直线段各作为一个聚类样本集,分别提取特征并进行聚类操作,依次识别出左、右路径边缘线。提取的特征应满足:路径边缘线之间的特征差异较小,路径边缘线和干扰直线段之间的特征差异较大。特征提取如图7所示,对于聚类样本图像中的所有直线段,将每条直线段延长至与图像边缘相交,使每条直线段都对应一个直角三角形。直角三角形的两直角边L与W,点到直线的距离d以及直角三角形的面积S,都可作为直线段的聚类特征。由于上述4个特征之间具有相关性。本文从4个特征之中选取S和L这2个特征作为最终的直线段聚类特征,将4维特征向量降为2维特征向量,方便聚类的同时仍保留了区分能力。

图7 特征提取模型
2.4.2 AP聚类
AP聚类[13]是2007年在Science上提出的一种聚类算法,其特点为:无需指定聚类个数和聚类中心,将所有数据点视为潜在聚类中心,对数据的初始值、异常值不敏感。该特点适用于本文动态变化的数据集。
AP算法的基本思想是将全部数据看作网络节点,将所有节点视为潜在聚类中心,通过计算节点间的相似度,构成相似度矩阵,再通过节点间的消息传递,找到最合适的聚类中心[14]。
节点间传递的消息分为吸引度和归属度。吸引度(,)反映点适合作为点的聚类中心的吸引程度;归属度(,)反映点选择点作为其聚类中心的归属程度。(,)与(,)越强,点作为聚类中心的能力越大。AP聚类分为4个步骤:
步骤1. 初始化吸引度和归属度矩阵为0矩阵,并计算相似度矩阵,确定参考度,本文取相似度矩阵元素的中位数;
步骤2. 计算吸引度和归属度,即


步骤3.更新吸引度和归属度。为阻尼系数,用于调节收敛速度和迭代稳定性,本文取=0.7,即


步骤4.若迭代次数超过设定值或者聚类中心在若干次迭代后保持不变,则停止计算。取(,)与(,)之和最大的作为聚类中心,并依据聚类中心对数据点进行分类;否则返回步骤2循环。
2.4.3 改进AP聚类
由于数据存在误差,AP聚类得到的路径边缘线所在类别可能包含干扰直线段,或未包含全部路径边缘直线段。为了对路径边缘线进行更为精确的聚类,本文在AP聚类的基础上,结合基于先验信息的判别模型,改进AP聚类算法[15-16]。
为提高判别效率,只提取特征作为判别依据。记聚类数据集={1,2,···,,···,},=(S,L)为直线段对应的特征向量,AP聚类后的个类别为{1,2, ···,C, ···,C}。计算每个类别C中特征的平均值,记为ave-v,类别C的聚类中心记为core-v。本文可获得的先验信息如图8所示。
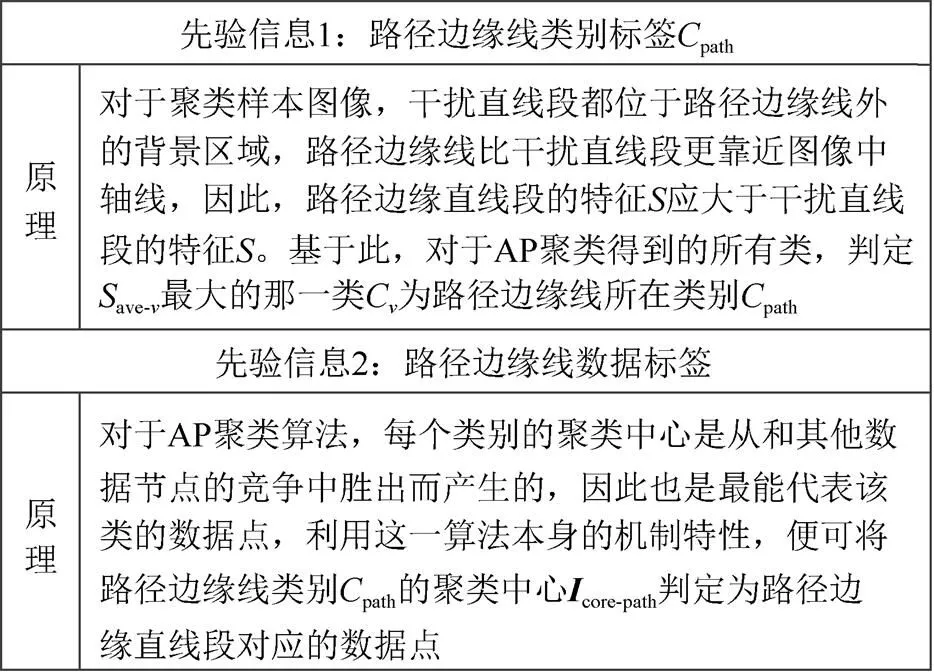
图8 先验信息
确定core-path后,设置路径边缘线识别半径,用于添加未识别的路径边缘线或剔除干扰直线段。距core-path对应的路径边缘线距离为0.035且平行的2条直线围成的梯形面积记为tra,取=0.5·tra,则识别半径,即

其中,,,分别为对应的路径边缘直线段的斜率、特征和特征。
结合先验信息的判别模型流程如下:
步骤1.基于先验信息1、2,经AP聚类得到path,其聚类中心core-path对应特征core-path,其他类别的聚类中心core-v对应特征core-v;
步骤2.计算∣core-path-core-v∣是否小于,对于小于的core-v,将其聚类中心core-v对应的类别C合并到path中,得到′path,′path的聚类中心记为等效聚类中心core-path,其值为原来的core-path与合并进来的其他core-v的均值,core-path对应特征core-path;
步骤3.计算path内其他数据点的特征与core-path的距离。若小于,则该数据点对应的直线段被判别为路径边缘线;若大于,被判别为干扰直线段,并从path中剔除,得到最终识别出的路径边缘线所在类别path-final。
判别过程如图9所示,对应上述3个步骤。
判别模型将C划入path,并在合并得到′path后,剔除干扰直线段,最终确定出路径边缘线类别path-final。由于该判别模型选用类别的聚类中心作为判别依据,故对由数据误差造成的异常点不敏感,可靠性更好;并且参数能随样本自适应变化,能自主实现对不同样本的精确筛选。
利用LSD算法输出的直线段信息,获得′path-final中直线段的端点坐标,作为路径边缘线的拟合点,拟合得到的直线作为路径边缘线。

图9 判别流程图
3 实验与分析
本文采用Matlab R2017b平台进行算法仿真测试。路径图像分别取自国内3个港口的起重机械以及本学院的港口起重机装备实验平台,共包含500张样本图片,图片大小分为640×480和480×640两种。
3.1 图像预处理
用改进过颜色算子灰度化,设置主分量系数=4,并和传统过颜色算子进行对比,测试示例如图10所示。可以看到,用改进过颜色算子灰度化后,路径区域和背景区域的灰度值差异较大,路径边缘明显,且由表面缺陷导致的暗区域被有效削弱,灰度化效果显著优于传统过颜色算子。
3.2 改进LSD算法测试
基于SVM的最优分类线,得到梯度阈值= 45.84。在本文实验环境下,对500幅路径样本图像进行分析,得到路径边缘线斜率的绝对值始终位于[2,4]之间,且路径边缘线倾角的变化幅度不超过15°,故将[2,4]设置为LSD算法的角度约束范围。测试示例如图11所示。

图10 图像预处理
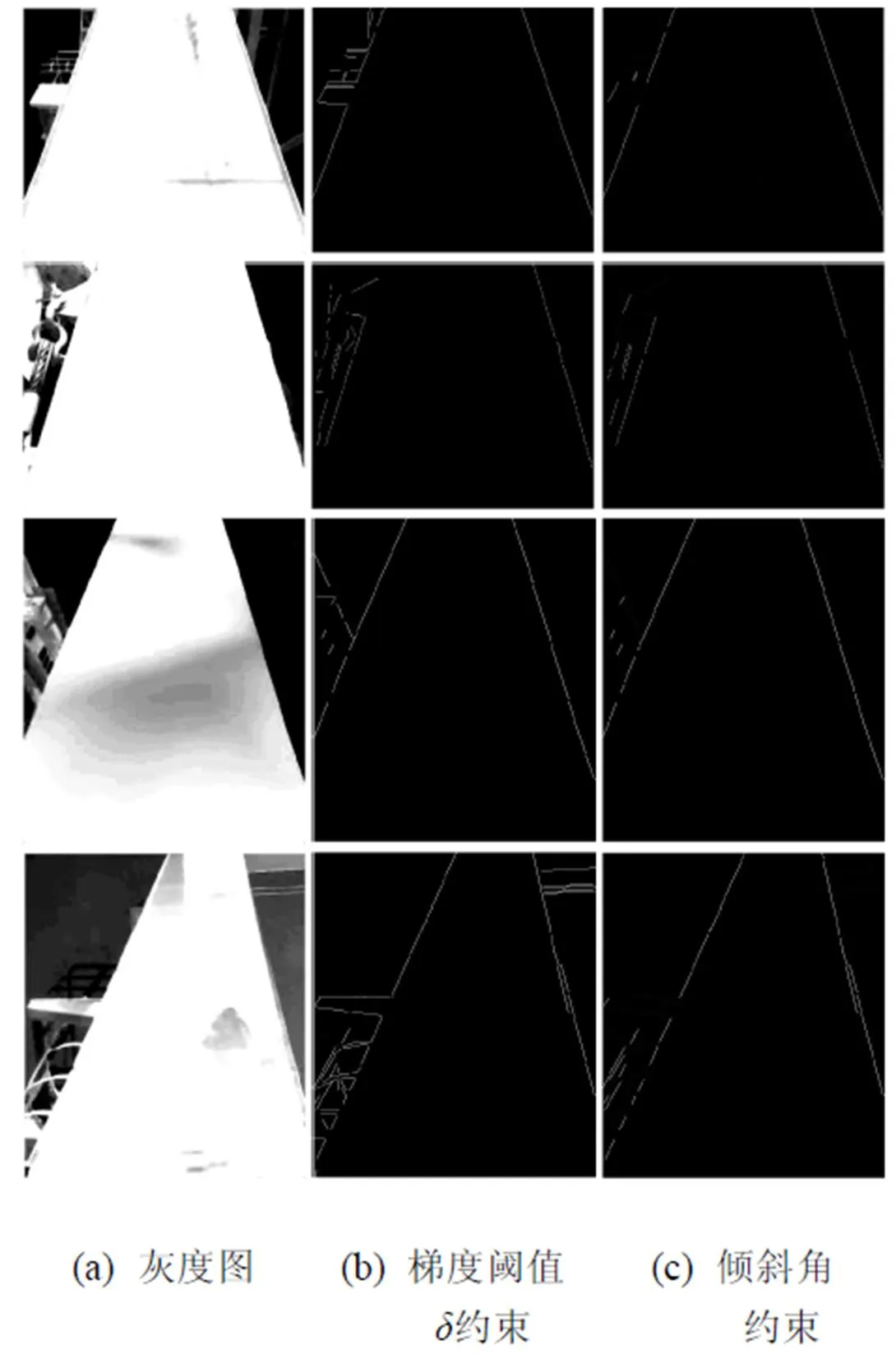
图11 改进LSD检测图
可以看到,经梯度阈值、主方向角、平面位置约束后,路径表面由暗区域导致的干扰直线段被有效清除,检测出来的直线段斜率||∈[2,4]。500幅样本图像中,仅有8幅图像的路径区域干扰直线段未被全部清除,成功率为98.4%,可见基于SVM的梯度阈值选取结果较为可靠。若需改变角度约束范围,在保证路径边缘线斜率始终位于约束范围之内的前提下,可更改LSD算法的角度约束范围。
3.3 路径边缘线聚类测试
聚类样本图像如图11(c)所示。本文列举7个变化的数据集,使用改进AP聚类算法筛选路径边缘直线段,测试示例如图12所示。图中红色虚线框为最终识别出的路径边缘线类别′path-final,其包含的数据点为最终筛选出的路径边缘直线段对应的数据点,在样本数据表中标红表示,聚类中心数据点的标号注明星号。为方便显示聚类结果,将特征放大100倍。
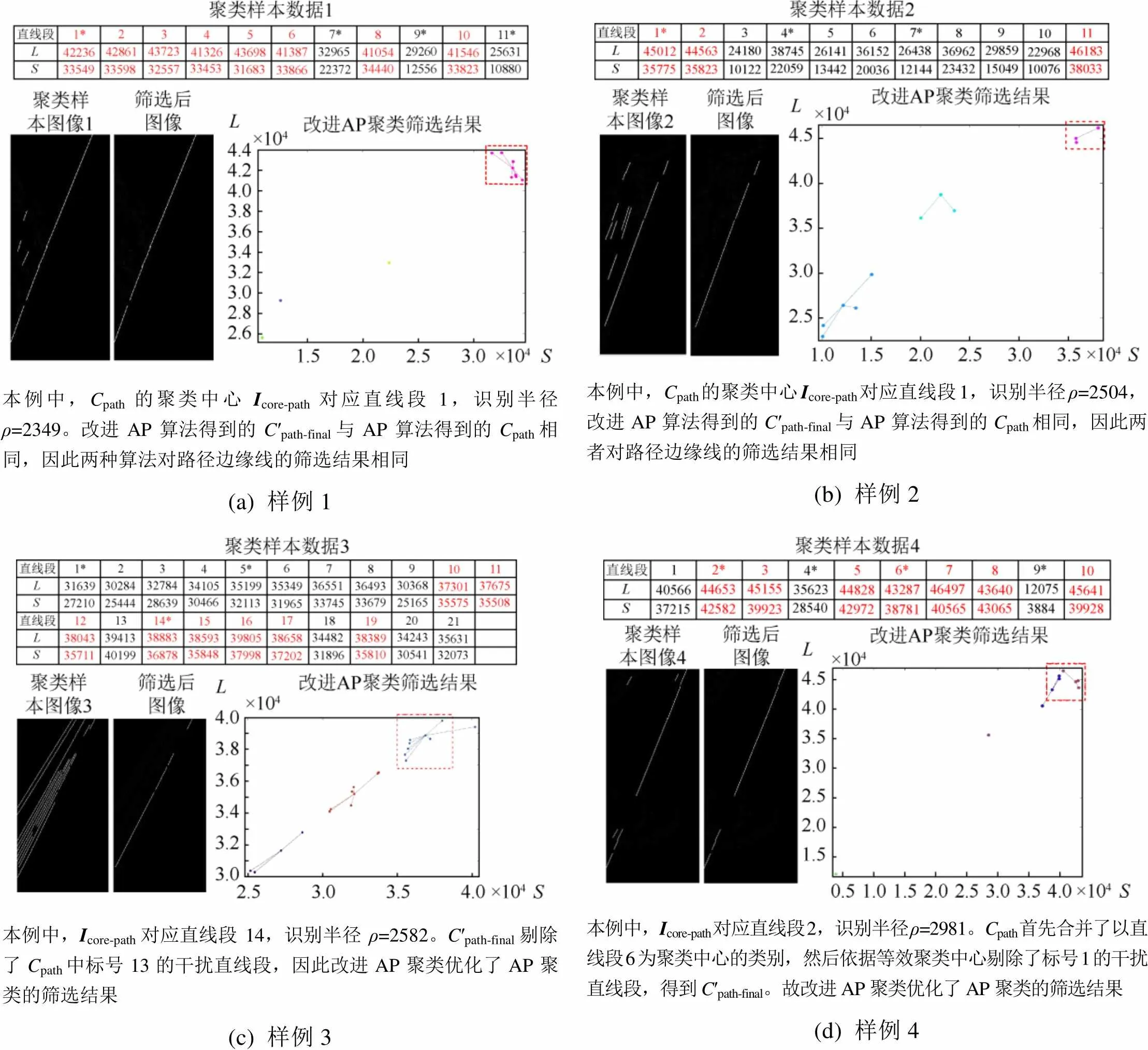
本例中,Cpath的聚类中心Icore-path对应直线段1,识别半径ρ=2349。改进AP算法得到的C′path-final与AP算法得到的Cpath相同,因此两种算法对路径边缘线的筛选结果相同(a) 样例1本例中,Cpath的聚类中心Icore-path对应直线段1,识别半径ρ=2504,改进AP算法得到的C′path-final与AP算法得到的Cpath相同,因此两者对路径边缘线的筛选结果相同(b) 样例2 本例中,Icore-path对应直线段14,识别半径ρ=2582。C′path-final剔除了Cpath中标号13的干扰直线段,因此改进AP聚类优化了AP聚类的筛选结果(c) 样例3本例中,Icore-path对应直线段2,识别半径ρ=2981。Cpath首先合并了以直线段6为聚类中心的类别,然后依据等效聚类中心剔除了标号1的干扰直线段,得到C′path-final。故改进AP聚类优化了AP聚类的筛选结果(d) 样例4
由图12可知,面对数据个数、数据大小、数据分布及数据密度都不同的聚类数据样本,改进AP聚类算法均能自主判断最佳聚类个数和聚类中心,从而准确筛选出所有构成路径边缘的直线段,无需手动调节参数,能够实现对动态聚类数据集的自适应聚类操作。
为了客观的表示聚类效果,本文定义路径边缘线正检率和干扰直线段误检率。

将本文聚类算法与其他常见的无需指定聚类个数的聚类算法进行比较,见表1。
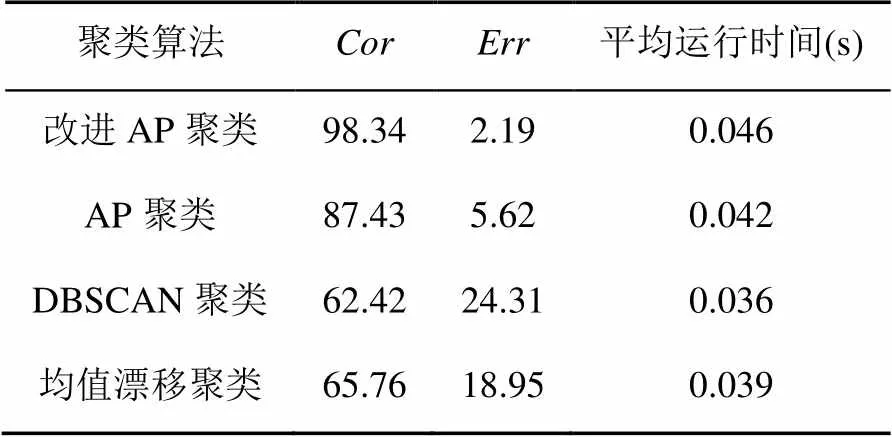
表1 聚类算法对比(%)
由表1可以看出,改进AP聚类算法的和均优于其他聚类算法,筛选效果最好,且运行时间满足实时性要求。
3.4 路径边缘线拟合
筛选出所有构成路径边缘的直线段后,将其端点作为路径边缘线的拟合点,拟合得到最终的路径边缘线,如图13所示。
3.5 评价与分析
基于拟合出的路径边缘线特征(sim,sim,sim)与真实路径边缘线特征(real,real,real),定义方位误差、倾斜角误差,即


大型起重机械的漆面颜色大部分为红色,橘色或黄色,少部分为蓝色,几乎没有绿色。因此样本的主颜色分量有R和B这2种。本文对比了不同主颜色分量和天气条件下的识别成功率,若≤3%且≤1°,则识别成功,其成功率见表2。

(a) 原图 (b)筛选结果 (c) 拟合结果
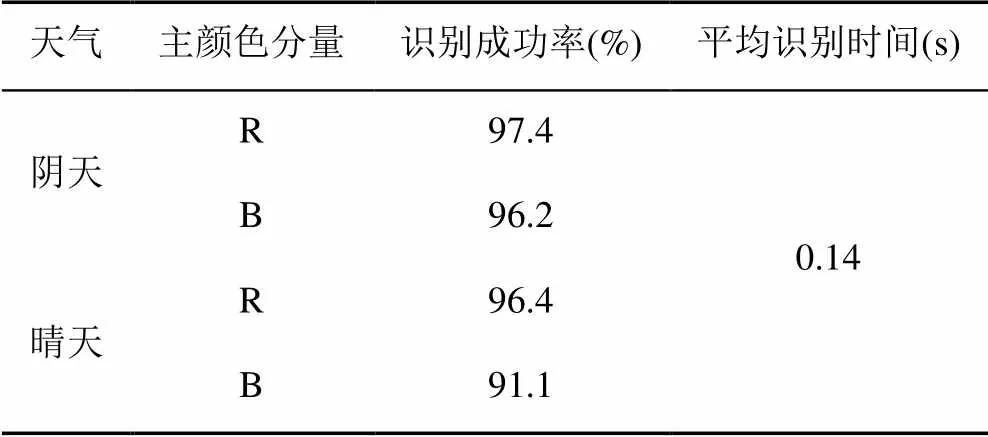
表2 识别成功率
由于晴天光照和天空背景的影响,晴天和主颜色分量为B时,识别成功率略低一些。主颜色分量为B的样本图像有79幅,主颜色分量为R的样本图像有421幅。本文按样本数量百分比加权平均,得到阴天的整体识别成功率为97.21%,晴天的整体识别成功率为95.56%,成功率较高。
选取所有识别成功的样本图像,计算识别精度见表3,整体精度较高。
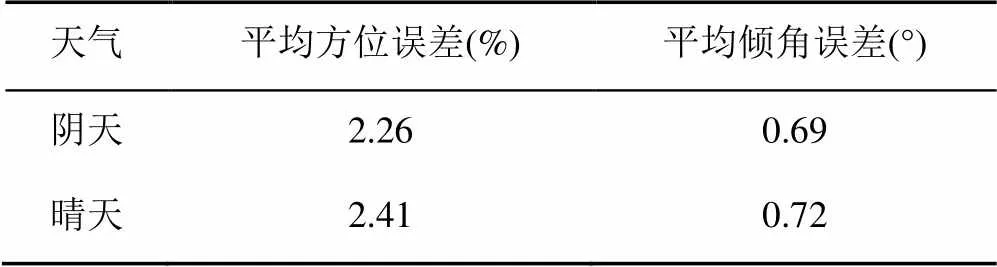
表3 识别精确度
实验在主频2.2 GHz、内存4 GB的硬件配置下进行,处理速度为7 fps,能够满足爬行速度为0.03~0.05 m/s的攀爬机器人路径识别实时性要求。
4 结束语
本文结合起重机金属结构路径的特点,创新性地提出一种基于改进LSD和AP聚类的路径边缘识别策略。利用LSD算法输出的直线段参数提取直线段特征,提出适用于动态样本的改进AP聚类算法,优化检测结果。通过大量实验证明,本文的路径边缘线识别策略在满足精度和实时性的前提下,对起重机金属结构路径边缘直线段的检测成功率为96%。不足之处为本文的路径边缘识别策略主要针对机器人攀爬行走过程中的路径识别,机器人的转向和避障依靠多传感器协同完成。在今后的研究中可尝试仅依靠机器视觉完成机器人转向、避障等所有动作。
[1] 郭克友, 王艺伟, 郭晓丽. LDA与LSD相结合的车道线分类检测算法[J]. 计算机工程与应用, 2017, 53(24): 219-225.
[2] 朱永丰, 曹闻, 朱述龙, 等. 基于LSD的巡检机器人航线偏角检测[J]. 信息工程大学学报, 2016, 17(1): 112-116.
[3] 茅正冲, 陈强. 基于PCA-LDA与SVM的AGV多分支路径识别与跟踪[J]. 激光与光电子学进展, 2018, 55(9): 148-155.
[4] 武星, 沈伟良, 楼佩煌, 等. 视觉导引AGV鲁棒特征识别与精确路径跟踪研究[J]. 农业机械学报, 2016, 47(7): 48-56.
[5] 范云飞, 孙兴波, 敬凯. 智能汽车赛道图像识别技术的研究[J]. 控制工程, 2017, 24(9): 1805-1810.
[6] 徐国晟, 张伟伟, 吴训成, 等. 基于卷积神经网络的车道线语义分割算法[J]. 电子测量与仪器学报, 2018, 32(7): 89-94.
[7] 贾会群, 魏仲慧, 何昕, 等. 基于神经网络与最小二乘法的车道线检测算法研究[J]. 汽车工程, 2018, 40(3): 363-368.
[8] 冯兴杰, 王文超. 一种基于MapReduce的半监督近邻传播算法[J]. 计算机应用研究, 2018, 35(7): 2011-2014.
[9] 徐明亮, 王士同, 杭文龙. 一种基于同类约束的半监督近邻反射传播聚类方法[J]. 自动化学报, 2016, 42(2): 255-269.
[10] GIOI R G V, JAKUBOWICZ J, MOREL J M, et al. LSD: A fast line segment detector with a false detection control [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4): 722-732.
[11] 王宇, 王硕, 谭民. 基于LSD的具有特定特征的三维物体轮廓提取算法[J]. 系统科学与数学, 2016, 36(9): 1410-1416.
[12] 李涛, 陈黎, 聂晖. 基于改进线段分割检测的电线杆遮挡检测算法[J]. 计算机工程, 2017, 43(9): 250-255.
[13] FREY B J, DUECK D. Clustering by passing messages between data points [J]. Science, 2007, 315(5814): 972-976.
[14] GIVONI I E, CHUNG C, FREY B J. Hierarchical affinity propagation [C]//Proceedings of the Twenty-Seventh Conference on Uncertainty in Artificial Intelligence. VA: AUAI Press, 2012: 238-246.
[15] WANG L M, WANG N B, HAN X M, et al. Semi-supervised hierarchical optimization-based affinity propagation algorithm and its applications [J]. International Journal of Computers and Applications, 2018, 40(3): 1-10.
[16] WANG L M, TAO X, HAN X M, et al. Semi-supervised affinity propagation based on density peaks [J]. Tehnicki Vjesnik-Technical Gazette, 2016, 23(6): 1787-1794.
Path Edge Recognition Strategy Based on Improved LSD and AP Clustering
LIU Bi-yue, ZHAO Zhang-yan
(School of Logistics Engineering, Wuhan University of Technology, Wuhan Hubei 430063, China)
The path edge recognition strategy of the crane metal structure climbing robot is divided into three steps. Firstly, image pre-processing which means using the improved over-color operator for grayscale. Secondly, the gradient threshold is determined by the method based on the optimal classification line of the support vector machine, in addition, main direction angle constraint is added to improve line segment detector (LSD) algorithm, and obtain the straight line detection image for clustering. Thirdly, the clustering data set is constructed by the feature extraction of straight line segments. Based on the dynamism of the data set feature of, the improved AP clustering algorithm is established by combining the prior information based discriminant model with the affinity propagation (AP) clustering algorithm to cluster the line segments and screen out the line segments constituting the edge of the path, and obtain the final path edge line by fitting. The experimental results show that compared with the traditional AP clustering and other clustering algorithms, the improved AP clustering algorithm has the highest screening accuracy for path edge lines.The recognition success rate of path edge recognition strategy based on improved LSD and AP clustering is 96% which meets the accuracy and real-time requirements.
edge recognition; over-color operator; LSD; SVM; feature extraction; AP clustering
TP 391
10.11996/JG.j.2095-302X.2019050915
A
2095-302X(2019)05-0915-10
2019-04-25;
2019-07-08
国家重点研发计划项目(2017YFC0805703,2016YFF0203100)
刘璧钺(1993-),男,河南南阳人,硕士研究生。主要研究方向为图像识别、机器视觉、机器人导航等。E-mail:13797000199@163.com
赵章焰(1963-),男,湖北武汉人,教授,博士,博士生导师。主要研究方向为机械安全性评估、摄影测量。E-mail:13871001982@163.com
猜你喜欢
数学物理学报(2022年5期)2022-10-09
建材发展导向(2021年19期)2021-12-06
临床骨科杂志(2020年1期)2020-12-12
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年12期)2017-04-23
通信产业报(2016年44期)2017-03-13
探测与控制学报(2015年4期)2015-12-15
科技视界(2014年25期)2014-04-27
雕塑(1999年2期)1999-06-28