小尺寸指纹识别技术∗
2019-11-29 05:13高广生黎铁军
计算机与数字工程 2019年11期
高广生 黎铁军
(国防科技大学 长沙 410073)
1 引言
生物认证[1]是识别和认证身份的理想方式。其中,指纹识别是一种优势明显、应用前景广阔的生物认证技术,是企业与科研单位一直关注和研究的热点。
指纹学研究始于PurKinje,William Herschel,Henry Faulds,Francis Galton等对指纹分类的研究,由这些研究发现指纹可应用于个人身份认证。
国内在指纹识别领域及相关应用的研究始于二十世纪八十年代初,现已取得不少成果,早期研发的系统大多以大型指纹数据库和快速检索特点为技术特色。
本文将围绕指纹识别技术当前的应用和研究热点——小尺寸指纹技术,由以下几个方面展开:一是介绍一般的指纹识别算法流程及匹配算法原理;二是就学术界针对小尺寸指纹识别的现有研究成果进行比较,三是对小尺寸指纹识别技术研究现状进行探讨,最后是进行总结和展望。
2 一般的指纹识别算法及原理
2.1 指纹识别算法流
一般而言,指纹识别算法包括图像处理、特征提取和指纹匹配等过程的算法。
由于由传感器采集获得的指纹图像是一个单色数字图像,为了使录入的图像互相匹配成为可能,因而必须在可以提取指纹特征的图像开始匹配流程之前,先进行预处理工作。其中,方向场建立、滤波、降噪、图像分割、二值化及细化是指纹图像预处理的几个基本组成。
2.2 指纹匹配算法
1)基于特征点的匹配算法
十九世纪晚期,由Francis Galton 最早提出,在其1892 年的著作《Fingerprints》中总结描述了指纹的一些总体特征,并对这些特征进行了分类,形成了传统上使用的指纹特征。
由于指纹的一般特征点的密度较低,所以在使用基于特征点匹配方法时,需要采集大面积的指纹样本和需要能采集大面积指纹的传感器或刷卡传感器。
2)非基于特征点的匹配算法
伤痕、汗水或灰尘引起的异常现象,表现为错误的特征点,基于特征点或图案的算法将因此失效。
非基于特征点的匹配算法,例如各种替代算法,比较先前存储的模板和候选指纹之间的基本指纹模式(拱形、螺纹形和环形)。这通常要求图像可以在同一方向对齐。要做到这一点,该算法需要在指纹图像中找到一个中心点,并集中于此。在非特征点基础算法中,模板包含对齐指纹图像中模式的类型、大小和方向。将候选指纹图像与模板进行比较,以确定它们匹配的程度。
3)混合方法
结合了传统特征点和非特征点方法的匹配算法通常被称为混合方法。

图1 (a)正常面积指纹图像;(b)移动设备指纹采集器尺寸;(c)非完整指纹上的特征点分布
在移动设备中的传感器,由于采集设备以及可获得的指纹图像尺寸都被大大减小,所采集的图像可获得的特征点非常有限,传统的基于特征点匹配的算法几乎失效,因而混合解决方案成为相关领域研究的新热点。
3 小尺寸指纹识别算法
早期的小尺寸指纹识别研究主要还是借助于细节点信息实现匹配的目的:Jea 等[2]利用从细节点导出的辅助特征结合基于流量网络(Flow Network)的匹配技术来实现小尺寸指纹匹配;Girgis等[3]提出基于图匹配理论的小尺寸指纹比对方法,并利用遗传算法来改善脊线形变和弹性形变对指纹匹配所造成的不良影响;Chen 等[4]把小尺寸指纹的尺寸信息用来进行小尺寸指纹识别;此外,Pore-Valley 描述子[5]、重构全局特征[6]的方法也都被用于小尺寸指纹识别领域。
与上述方法中所关注的小尺寸指纹相比,小体积嵌入式设备上的指纹采集仪所采集到的指纹尺寸更小,包含特征点更少,这使得基于特征点匹配或者重构全局特征的方法的性能受到很大影响。
为了解决这一问题,现在研究的方法和思路的重点主要集中在以下几个方向。
3.1 基于相关系数的方法[7]
基于相关系数的方法的工作步骤主要分为图像校准(使用滑窗技术,混合微观和宏观的特征)、提取共同特征(先将图片分解成更小的区域,之后投影两个指纹的公共奇异点。相对于这些点位于同一位置的区域,被识别为共同特征)、计算相似度(计算局部和全局相似性。首先将这两幅图像分割成较小的区域,并将相应区域的相关性计算为局部相似性,然后将Fisher 变换应用于局部相似性以减少畸变区域的影响,最后将转换后的数据平均值作为两个指纹之间的最终相似度进行计算)三步,通过提取指纹图像信息,逐个像素地计算两幅指纹之间的相关系数,以提升指纹识别系统对不完全指纹的匹配效果,如图2所示。
以公开数据集FVC 2002 DB1作为实验测试用数据库基准对20×20 至50×50 像素的图像进行实验,可发现将区域大小缩小到30×30 以下的像素时,识别效果变差。经分析,原因主要在以下几方面:1)由于匹配的图像区域太小,没有足够的指纹识别信息,两个指纹的局部相似性都会很高;2)由于匹配的图像区域太小,使得非线性失真明显,小区域无法处理精确定位两个指纹之间对应区域的问题。
该方法评价的指标简单、有效,指标为计算局部相似性,然后将结果融合到一个全局得分中,这样它就不会受到局部相似性的分布偏差影响。与传统的单区域方法相比,计算局部相似度并将它们的平均值作为最终相似度可以获得更高的识别精度,指纹尺寸在一定区间内大小越小,系统性能越准确。

图2 基于相关系数的方法[7]
3.2 基于纹理特征的方法[8~9]
该类方法通过提取指纹图像的纹理特征,进而由纹理特征实现指纹匹配。典型的基于纹理特征的方法有尺度不变特征变换(Scale Invariant Feature Transform,SIFT)[8]和加速-风(Accelerated-KAZE,A-KAZE)[9]。
3.2.1 尺度不变特征变换(SIFT)
尺度不变特征变换(SIFT)在图像的预处理过程中利用高斯图像的差异来找出区分关键点,将同一手指上采集不同的图像互相匹配迭代产生新的匹配模板进行匹配。
其中,SIFT 关键点与一般的指纹特征点如图3所示。

图3
尺度不变特征变换(SIFT)方法的工作步骤如图4-6 所示,主要分为高斯差分算子(Difference of Gaussian,DOG)尺度空间生产、关键点找寻(在3×3局部极值和邻域尺度下,将一个像素与其26 个邻域进行比较,将检测到局部极值作为候选的关键点)、关键点定位(根据候选关键点的稳定性来选择和确定关键点;为提高匹配度,剔除低对比度或边缘定位不良的候选关键点)、确定特征点方向(通过关键点所在的局部局域的梯度方向来定义关键点的方向,这样定义的关键点具有旋转不变性)、生成特征描述算子(每个关键点在此阶段将按比例确定的区域划分为4×4 个块,并测量每个块8 个方向的局部图像梯度,并根据所有128 个局部图像确定描述符)、计算确定k2 中两个欧几里得距离最小的关键点和k1 中每个关键点的第二个欧几里得距离(如果最小距离乘以阈值小于第二距离,则匹配具有最小距离的关键点)几个步骤,最后将提取的SIFT关键点和指纹细节特征点进行匹配。

图4 构造SIFT模板

图5 图像处理(提取纹理特征)

图6 SIFT方法的流程示意
改进方法主要是对使用SIFT 提取关键点处理后的图像,通过SIFT 匹配器进行匹配,使输入图像的SIFT 关键点合并到匹配的模板的SIFT 关键点中,如图7 所示。其中,用于模板扩展的SIFT 匹配器使用SIFT 关键点和方向来选择输入和模板筛选功能之间的重叠区域。

图7 SIFT改进方法的流程示意
在128像素×128像素的触摸传感器下,使用尺度不变特征变换(SIFT)对最小重叠区域以32×32像素为单位的指纹图像进行实验,可以得出该方法的以下优势:1)SIFT特征对图像的缩放和旋转是不变的,对视点变化和不确定的变化具有鲁棒性;2)SIFT特征不依赖于图像的具体形状,并且对旋转具有鲁棒性;3)SIFT 关键点分布在更宽的区域,并且定位在比细节更多的像素;4)合并了同一手指的在两个不同的重叠区域细节或曲率变化最小的图像。
但是,该方法也存在以下不足:1)关键点的不稳定和错误:1)高斯模糊不保留对象边界信息并且在所有尺度上平滑到相同程度的细节与噪声,影响定位的准确性和独特性;2)由于高斯模糊导致扩散跨越脊线从而降低了纹理的独特性);3)伪匹配特征对匹配系统的影响比较大。
3.2.2 加速-风(A-KAZE)
加速-风(A-KAZE)的主要工作步骤分为以下几步:1)指纹图像分割(ROI Segmentation);2)使用A-KAZE 方法检测关键点(非线性尺度空间生成、关键点检测和选择、关键点特征描述算子生成)、逐点匹配(Point-wise Matching)、选择最佳关键点对(Selecting Best Matches)、匹配分数计算(Match Score Computation)。

图8 A-KAZE(Accelerated-KAZE)流程
该方法首先采用基于强度方差的图像分割方法从背景中提取指纹的前景区域,利用多尺度纹理描述符(双边滤波、非线性扩散滤波)的方法提取特征,模糊局部自适应图像数据,保留对象边界和消除噪声;最后通过减少使用嵌入在金字塔结构中的快速显式扩散(FED)方案求解非线性扩散方程的计算复杂性[10]。
使用FVC2000 DB1、FVC 2000 DB2 模拟不完全指纹和内部收集的不完全指纹进行实验可知小面积矩形传感器在几次扫描中最大限度地扩大手指覆盖范围,通过多次扫描生成237×117 像素指纹的模板和1∶1 匹配的平均时间分别为86ms 和19ms。
该方法面临的突出问题在于使用加法算子分裂(Additive Operator Splitting,AOS)方案求解非线性扩散方程,使得计算量非常大。
3.3 基于感知哈希算法的方法
基于感知哈希算法(Perce-ptual Hash Algorithm,PHA[11~13])的方法主要利用哈希编码和图像块匹配的思想,计算两幅指纹图像的相似程度,如图9 所示。对每张图像生成一个“指纹字符串”(哈希值),然后比较不同指纹图像的哈希值。结果越接近,就说明图像越相似。
这类方法简单快速,不受图片大小缩放的影响,但还不能完全反映真实性的低频率,只能粗略呈现相对于平均值频率的相对比例。只要图片的整体结构保持不变,哈希结果值就不变,这也导致了图片的内容不能变更,对于有污损的指纹图像的识别效果较差。
3.4 基于相位相关的方法
基于相位相关的方法(Phase-Only Correlation Method,POB[14])利用两幅指纹图像的相位差进行逆傅里叶变换,实现基于相位相关的指纹匹配。该方法主要分为两步全局搜索(旋转对准,平移位移对准,精确旋转的BLPOC 函数匹配分数计算)和局部搜索(全局搜索结果中更精确的匹配位置将通过在块周围移动几个像素来搜索)两步,如图10 所示。
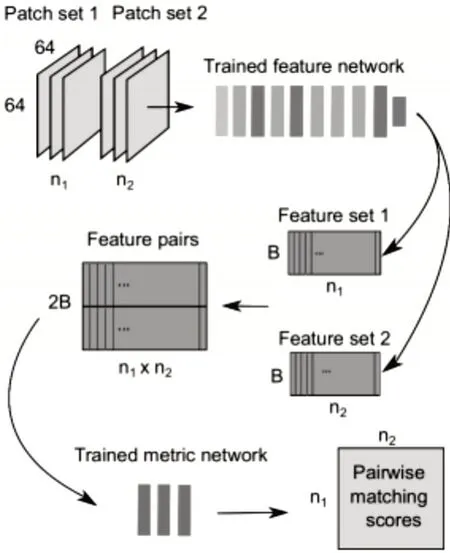
图9 图像块匹配的思想

图10 基于相位相关的方法流程
使用FVC2000 DB2(set A)中128×128 像素的整个数据集进行的身份验证测试给出了EER 1.7020%的结果,也验证了使用该方法不受图像移动和亮度变化的影响,对噪声具有很强的鲁棒性,但穷举搜索是该方法的局限性。
3.5 结合深度学习方法
最近,Zhang 等[15]提出了一种针对手机端的深度学习方法,方法流程模型如图11。

图11 模型结构
该方法将原始指纹图像投影到欧几里得空间中,在训练阶段仔细设计了一个k-最近邻策略(K-Nearest Neighbor,KNN)方法选取合适的三元组作为训练样本进行训练;同时将Triplet Loss和Softmax Loss 融入到训练好的38 层CNN(卷积神经网络)中,代替常规的只采用一种Loss 的模型进行优化,使其快速、稳定地收敛,再用L2-距离测量两个指纹的相似性。所提出的模型还不能充分利用所有细节拓扑是该方法存在的主要问题。
4 结语
综上所述,指纹识别技术在当下已经比较成熟,而对于特定场景和特定应用需求的指纹识别技术的成果还相对比较少,研究还有待深入。针对小面积指纹算法的研究和评估目前并没有一个可用于实验比较的公认的标准数据库,学术界有关小尺寸指纹的公开研究成果还远不能反映商业应用的实际,而已进行商业应用推广的小尺寸指纹识别技术在实际使用中也可圈可点,相关领域的应用和研究都仍有很多亟待解决的问题。
本文针对小尺寸指纹识别技术发展现状提出几点下一步相关研究的工作重点:构建标准的可进行比较实验的开源小尺寸指纹数据库,给相关领域的研究验证新技术提供参照标准;将高效指纹识别一作为个新的研究方向,提取算法和指纹图像的匹配对最佳算法的选择影响着传感器使用的便利性以及处理器进行匹配时所消耗的功率;在指纹采集设备的技术上探索新的方法,提高所采集的指纹图像质量,针对小尺寸指纹特征点有限的特点,通过提高图像质量结合汗孔识别的研究,获取新的研究进展;尝试使用深度神经网络与注册模板的小面积指纹匹配方法以及一些融合方法对指纹技术进行新的优化。
猜你喜欢
建材发展导向(2022年3期)2022-04-19
今日农业(2021年8期)2021-11-28
小天使·一年级语数英综合(2020年10期)2020-12-16
广东教育·高中(2017年10期)2017-11-07
中国知识产权(2016年11期)2016-11-11
中国知识产权(2016年11期)2016-11-11
儿童时代·快乐苗苗(2016年2期)2016-10-22
发明与创新·大科技(2016年5期)2016-05-17
个人电脑(2016年6期)2016-05-14
新高考·高一物理(2015年5期)2015-08-18