
悬挂式深松机耕深监测系统的设计与试验
2019-12-04 04:11杨少奇张磊孟长伊张云硕徐峰李广宇杨海天
价值工程 2019年31期
杨少奇 张磊 孟长伊 张云硕 徐峰 李广宇 杨海天

摘要:目前深松作业的耕深测量主要以人工测量为主,测量精度和效率都比较低。为了提高深松作业过程中耕深测量的精度和效率,提出一种基于悬挂式深松机的耕深监测系统。建立耕深与下拉杆角度之间的数学模型,在下拉杆上安装角度传感器实时监测下拉杆的倾角数值,换算可得到实时的耕深。利用最小二乘法求解出数学模型的参数。分别进行了三次试验,并对每次试验分别拟合出一次曲线、二次曲线和三次曲线。结果表明,拟合的二次曲线可作为耕深与下拉杆角度之间的最优数学模型。
Abstract: At present, the tilling depth measurement in subsoiling operation is mainly by manual measurement with low precision and efficiency. In order to improve the accuracy and efficiency of the measurement of tilling depth in the process of deep tillage, a tilling depth monitoring system based on the suspension subsoiler was proposed. The mathematical model between the tilling depth and the angle of the lower link was established. The Angle sensor was installed on the lower link to monitor the inclination value of the lower link in real time and real-time tilling depth can be obtained by conversion. The least square method was used to solve the parameters of the mathematical model. Three tests were carried out respectively fitting primary curve, quadric curve and cubic curve. The results show that the fitted quadric curve can be used as an optimal mathematical model between tillage depth and angle of pull rod.
關键词:深松;耕深;监测系统
Key words: subsoiling;tilling-depth;monitoring-system
中图分类号:S222;TP274 文献标识码:A 文章编号:1006-4311(2019)31-0246-02
1 系统结构和原理
为了在作业过程中能自动测得耕深,通过对悬挂式深松机的结构进行分析后,建立了耕深监测系统。耕深监测的整体结构主要包括拖拉机、悬挂式深松机、倾角传感器和数据采集模块。其中倾角传感器有1个,安装在左下拉杆上。整体结构简图如图1所示。
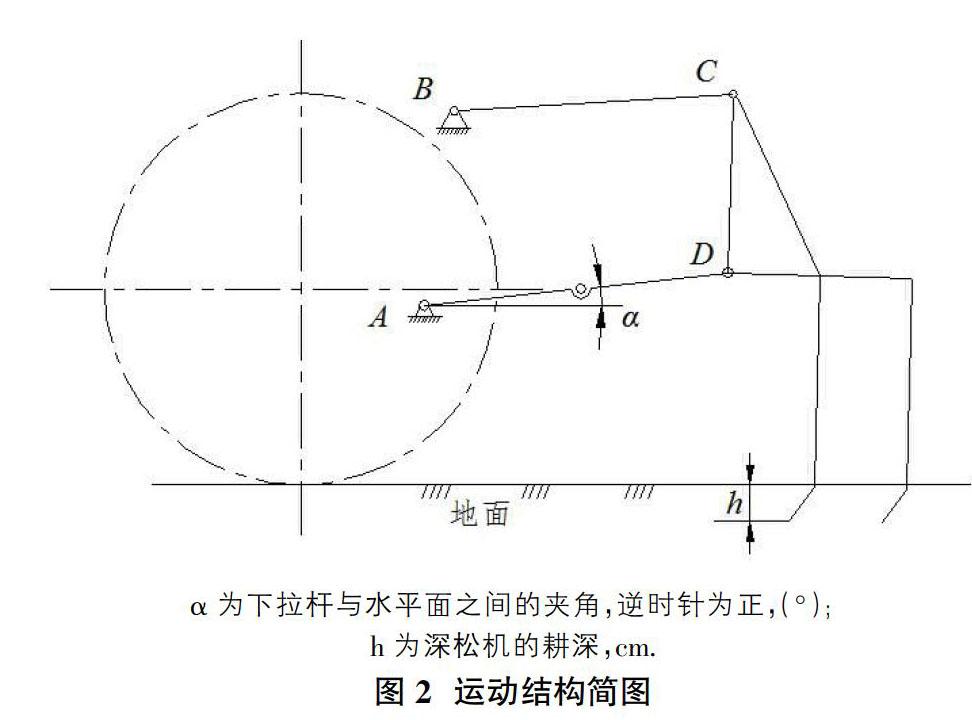
建立下拉杆角度α与深松机耕深h的数学关系模型,即可通过采集到下拉杆的倾角数值,就可以得到耕深数值。深松机的三点悬挂运动结构简图如图2所示,A为下铰接点,B为上铰接点,C为上悬挂点,D为下悬挂点,ABCD组成四连杆机构,AB视为机架固定不动,杆CD(即深松机)通过拉杆BC和拉杆AD的连接可以绕着机架旋转,从而实现深松机的提升或降落。在深松机从最高点降落到最低点的过程中依次测量六个数据点,{(αi,hi)}(i=0,1,…,5),利用最小二乘法求出拟合曲线,即
其中b0,b1,…,bn为回归系数,n为拟合多项式的最高次数。
2 试验过程及数据处理
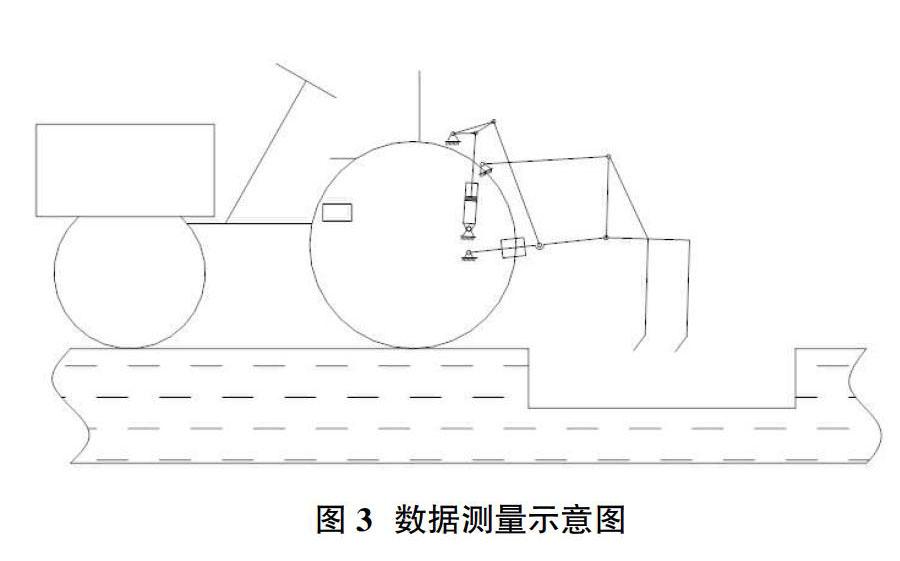
将深松机悬挂于拖拉机上并提升深松机至最高位置,然后把拖拉机开到测量土槽处,熄火并拉好手刹。数据测量示意图如图3所示。通过打开拖拉机的提升液压阀门,可以降低深松机的悬挂高度。依次打开提升液压阀门六次,使得深松机从最高点尽可能等间距的降低到最低点,在降落的过程中分别测得六个数据点,{(αi,hi)}(i=0,1,…,5)。然后,再启动拖拉机,提升深松机至最高点,重复上面的试验三次。
利用最小二乘法处理每次试验的六个数据点,分别拟合出一次曲线、二次曲线和三次曲线,拟合曲线如表1所示,并计算每条曲线的相关系数R2,其结果见表2。
相关系数R值越趋近于1,说明曲线的拟合程度
越好。
3 结果分析
相关系数R值越趋近于1越好。通过三次试验拟合出的九条曲线的相关系数的比较分析发现,拟合出的二次曲线的R2值大于一次曲线,三次曲线与二次曲线的R2值基本上相等。故可选择二次曲线作为下拉杆角度α与深松机耕深h的数学关系模型。
参考文献:
[1]杜新武,杨绪龙,庞靖,等.悬挂式旋耕机耕深监测系统设计与试验[J/OL].农业机械学报:1-11[2019-08-30].http://kns.cnki.net/kcms/detail/11.1964.S.20190610.0906.002.html.
[2]尹彦鑫,王成,孟志军,等.悬挂式深松机耕整地耕深检测方法研究[J].农业机械学报,2018,49(4):68-74.
[3]谢凌云.大马力拖拉机电液悬挂系统耕深自动控制研究[D].江苏大学,2016.
[4]杨少奇.基于BP神经网络的土壤比阻预测模型[D].长春:吉林大学,2019.
猜你喜欢
农机化研究(2024年4期)2024-01-09
农业机械学报(2021年8期)2021-08-27
农业科技与装备(2020年6期)2020-12-23
农业机械学报(2020年9期)2020-10-10
现代农业科技(2020年13期)2020-08-04
农业工程学报(2017年22期)2017-12-15
科学与财富(2016年28期)2016-10-14
