
灯泡自动包装机设计研究
2019-12-20 03:03耿雅男付拯马银忠
价值工程 2019年33期
耿雅男 付拯 马银忠


摘要:当前,灯泡包装仍普遍采用人工包装,存在工作效率低、人工成本过高、现场较为混乱等问题,人工长时间单调作业,易产生疲劳,易产生工伤事故。文中设计的灯泡自动包装机包括运输结构、开盒机构,灯泡进盒、盒体封口、灯泡进箱结构,能完成将规格不一的灯泡自动装箱的需求。
Abstract: At present, manual packaging is still widely used in lamp packaging. There are some problems, such as low efficiency, high labor cost and confusion on the spot. Long time monotonous manual work can easily lead to fatigue and work-related accidents. The bulb automatic packaging machine designed in this paper includes transportation structure, box opening mechanism, bulb box entry, box sealing and bulb box entry structure, which can fulfill the requirements of automatic packing of bulbs of different specifications.
关键词:自动;包装机;灯泡;设计
Key words: automatic;packaging machine;light bulb;design
中图分类号:TB486 文献标识码:A 文章编号:1006-4311(2019)33-0182-03
0 引言
工业技术的变革,促进了社会商品流通发展。在商品需求量不断增加前提下商品供应量持续加大。因此高效的商品生产需求带动了自动化生产技术。同时,高效的包装技术也应时得到发展,和基础包装设备相比,包装机属于一种现代科技产物,包装自动化是其设计与制造的主导思想及核心技术。顾客手中的商品没有任何一件是未经包装而获得的,也就是说,商品包装需求量巨大,因此包装设备必需更加简单、便捷才能满足日益增长的商品包装需求。包装机能将商品包装效率显著提升,从而缩短商品运输时间,实现企业核心竞争力提升目标。在减少用工量的同时,实现用工成本节约,降低包括工人的劳动强度。完善包装业发展,促进我国智能设备发展,助力国内高、精、尖技术进步,增强中国在全球范围内的整体竞争力,为我国赢得更多核心技术主导权,所以研究设计包装机具有更充分的现实意义[1]。
1 包装的总体设计
本机械采用模块化设计思想,分别设计了自动开盒机构,灯泡进盒机构,运输机构,灯泡自动进箱机构,并将机械在空间上划分为A工位(自动开盒机构), B工位(灯泡进盒机构),C工位(纸盒封口机构),D工位(灯泡进箱机构),E工位(纸箱封口、打包机构)[2]。图1和表1即为本次研究设计的包装设备中的五个机构的工位划分与组件功能。
2 包装机结构设计
此自动包装机四个机构的空间关系是在一平面内成行排列的,开盒机构与灯泡进盒机构以及封盒机构通过运输机构相连,进箱机构与其通过一个有倾角的滑道链接,笔者以SolidWorks软件设计了该包装设备中的各个模块三维造型。
2.1 运输机构设计
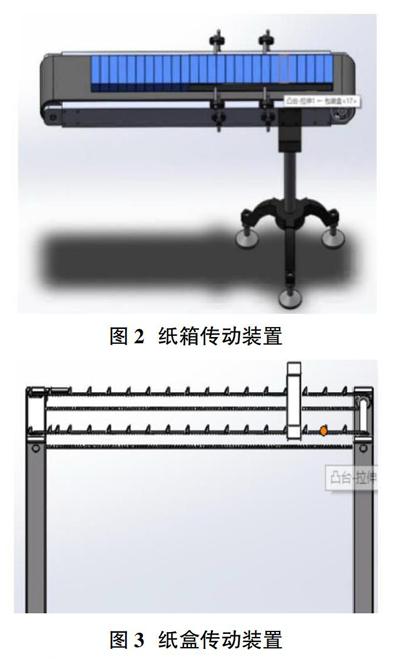
灯泡包装机中的运输机构功能主要表现在纸箱传递、纸盒运输这两个环节。其运输组件的核心构件则包括行程开关、步进电机、特制链条及传送带等,如图2是箱体的传送机构,图3是纸盒的传送机构,构成部分包括步进电机、特制链条,链条齿之间的距离接近于纸盒宽度,在步进电机的带动下可以稳定运输纸盒,以达到指定的位置。本文所用到的特殊的链条有别于普通的传送带,它能更加的稳定的卡住需要运输的纸盒,以防止在传送带上由于潮湿等环境因素,影响摩擦力易导致无法运输的问题。这种运输方法在保持成本不增加前提下实现了结构简单化目标,且可以更准确、牢靠的控制纸盒运行,明显不同于传统设备。
2.2 开盒机构、灯泡进盒机构和封盒机构设计
开盒机构和灯泡进盒机构是包装机的核心结构,两机构主要是完成开盒以及灯泡进盒功能,未开启纸盒放入后撞块在气缸的作用下对盒子进行小力的沖撞,在这些动作的配合下使纸盒成型,当完成开盒后,压小舌杆现将小舌压至固定位置,大舌弯曲机构将大舌压弯到45度之后压小舌杆撤去,然后将大舌压至盒体,一侧的盒子完成封盒,定时器定时结束,步进电机转动以带动成型后的盒子,运输到灯泡进盒的位置后,在气缸盒推杆的作用下,灯泡被推进纸盒,因为一侧纸盒完成封盒,以保证灯泡可以安全入盒,不会使灯泡因为过大的加速度滑出纸盒,在进行另一侧纸盒包装,从而完成灯泡的单个包装。此机构与传统的“气动推杆”结构相比结构和运动过程更加简单,且适用于不同型号的产品,扩大适用范围。上述机构的三维图如图4所示。
进箱机构主要实现进盒灯泡的入箱过程,其中整体的机构是由机械手组件和传送机构组成,因为纸箱质量较大所以用普通的传送带即可满足运输要求,在灯泡装盒封盒完成后,进入装箱装置的传送带,到达搬运机械手的位置时,机械手开始工作,机械手每个工作臂上都有上、下限位和左、右限位开关,而其夹持装置不带限位开关。一旦夹持开始,定时器便会启动,定时器结束,夹持动作随即完成,机械手到达放置点后,将工件松开的时间也是由定时器控制的,定时器结束时,表示被抓工件已松开。机械手起始位置在盒子正上方的位置,同时通过伸缩杆的作用,机械手竖直向下运动到达可抓住盒子的位置时接通下限位开关定时1秒后夹持装置开始工作,夹紧盒子,定时1s后机械臂竖直向上运动到达相应位置后触动上限位开关,停止上升,右移机械手,在将右限位开关触动时停止右移;机械手开始下降,触底条件下将下极限开关触动,就此停止下降;定时器接通开始工作,机械手开始放松工件,1s定时结束,将工件松开,随之进入提升状态,上升到顶部,触动上极限开关,上升停止;左移至原点的机械手在将左限位开关触动后,终止继续左移,装箱就此结束[3]。进箱机构的三维模型如图5所示。
2.3 纸箱封口、打包机构设计
封箱打包机构是包装机的最后环节,其主要是完成装箱后的箱体的封口和胶带密封,封口机构是通过气缸驱动带动齿条运动,齿条和齿轮啮合带动齿轮转动,这样与齿轮连接的转轴转动,转轴另一端连接的气缸摆臂也同时摆动,这样就完成了封口的动作。纸箱被推箱机构推入纸箱轨道中后,纸箱在向前运动,因为封箱机构上方有一個装置,该装置可以使纸箱在牢固的同时,也能把前单向胶轮压低,使其发生转动。胶带的顶端在前单向胶轮上,当纸箱从前单向胶轮压过时,前单向胶轮上的胶带就会粘贴在纸箱上。纸箱在皮带摩擦力的作用下继续向前,与此同时前单向胶轮通过曲柄带动后单向胶轮,两个单向胶轮同时发生转动,后单向胶轮连接的弹簧被拉伸。纸箱在前进过程中的同时将刀片和刀片上的挡板压低。与刀片和刀片的挡板连接的弹簧被拉伸。当纸箱越过刀片和刀片挡板的时候,刀片和刀片挡板在弹簧的作用下沿下压的路径反向转动,从而可以切断胶带。当纸箱继续前进,越过后单向胶轮时,连接后单向胶轮的弹簧要恢复原来的形状,因此连接后单向胶轮的弹簧会发生收缩,从而带动给后单向胶轮沿下压的路径反向转动,因此纸箱底部胶带的后半部分被粘贴好。同时后单向胶轮通过曲柄带动前单向胶轮转动,所以当纸箱穿过纸箱轨道封好胶带后,折前盖及封箱装置自动还原。
以SolidWorks软件为基础装配已设计完成的各机构、零部件,如图6所示的三维立体灯泡包装机结构即可获得。
3 包装机控制系统设计
灯泡包装机的控制系统主要包括由可编程控制器(PLC)、继电器等元件组成。
基于PLC的执行元件控制系统设计:PLC现已成为工业自动化控制领域的一种主要装备,其发展速度极快,可以有效满足工业自动化的各种自控需求。因为包装机需要由各种复杂传感器组配而成,同时存在过大的干扰,可编程控制器的优势则在于编程方便、控制能力强、可靠性高等,所以对于纸箱包装机可编程控制系统而言,应能基于待包装产品技术来协调管理各个部分,这点在设计其电控部分时需要考虑在内。运送待装盒(箱)产品环节、装箱成型环节、纸盒进箱环节等包装机控制系统控制的重点环节。笔者研发的基于PLC的自动控制系统由内部控制系统、电磁阀、光电开关、限位开关等关键件组成,纸箱包装可以就此顺利完成,将各类包装需求全面满足。
由于灯泡包装机的各组件互相独立,因此包装机的控制执行系统被笔者设计成2级,所以组件启、停控制由1级系统负责;各组件内部的执行件启、停由2级系统(子系统)负责,控制方式上通过行程和时间的方式来进行控制已达到包装机的精确控制,比如装盒机构子命令控制原理:运输组件PLC为S1,其利用A1、A2和1级PLC、检测开关分别连接,电机参数设置为B1、B2,电磁继电器参数设置为C1-C4[4]。装箱机构的控制原理如图7所示。
4 结束语
包装机机构及其控制原理是本文阐述的重点,所应用的PLC控制系统弥补了传统继电器控制机械的缺陷,使得灯泡自动包装的效率提高,同时本机构用气缸实现往返运动减少电机频繁正反切换,防止造成电机容易过载过热引起火灾隐患,使安全性大大提高。对于机械部分,尽可能采用标准件,减少零件制造成本。测试结果证实,笔者设计完成的包装设备功能齐全,可以将各种型号的灯泡包装需求全面满足,提高包装效率,具有良好的包装效果。但是因机械是各个独立机构控制组合,所以多次调整会导致机构精度下降严重时配合出现误差,导致包装失败。同时进行连续工作会产生卡死情况,有待进一步开发和改善。
参考文献:
[1]周卫江.纸盒包装机的结构与分析[D].浙江工业大学,2011.
[2]尚东阳,赵树国,姜阳,刘子靖.新型纸箱包装机的设计[J].机械工程师,2017(07):84-87.
[3]李芹.工业机械手控制系统动作流程及其设计[J].现代制造技术与装备,2019(08):197,199.
[4]张彩萍.PLC控制系统在新型纸箱包装机中的应用[J].中国包装工业,2013.
猜你喜欢
快乐语文(2021年36期)2022-01-18
装备制造技术(2021年1期)2021-05-21
学生天地(2020年5期)2020-08-25
家教世界·创新阅读(2020年1期)2020-05-11
家教世界(2020年1期)2020-03-07
电子测试(2018年10期)2018-06-26
电子制作(2016年23期)2016-05-17
交通建设与管理(2015年15期)2015-03-20
机电信息(2014年23期)2014-02-27
机电信息(2014年20期)2014-02-27
