
多功能智能护理床设计与人因功效分析
2020-01-18 08:11黄楚云杜雷王庆礼张勇赖李李
中国医疗设备 2020年1期
黄楚云,杜雷,王庆礼,张勇,赖李李
台州学院 航空工程学院,浙江 台州 318000
引言
美国和日本最早开展智能护理床方面的研发,掌握着高端的多功能护理床技术,产生了一批有一定影响力的公司[1]。针对智能护理床研究大致可分为三类。
第一类是通过机械结构设计以辅助病人或护理人员完成各种动作,如美国麻省理工学院通过支撑杆控制,设计一款吊床式护理床,使病人在左右侧翻与平移时几乎没有横向力影响[2]。冯亚文等[3]通过结构设计实现起做、翻身、如厕等多体位变换,以满足患者需求并缓解护理压力。多功能床椅结合的护理床结构设计[4-5],使电动轮椅伸展时与床体结合成卧姿使用,收缩时形成坐姿可带动患者四处活动,可降低脊椎病与褥疮发生率。
第二类利用传感器技术实现病人生理参数与姿态的状态监控,如Manohar等[6]把传感器安装在护理床床褥下,并通过无线通信接口来传输数据,能时时监测病人卧床体位的变化。Fiedler等[2]针对长期卧床不起的患者研制的智能护理床,能够根据床所受压力分布状况,而作出自适应调整,起到预防褥疮的作用。蒋皆恢等[7]研制的基于物联网的智能护理床,可以通过移动智能终端远程控制智能护理床完成精准的机械动作,查询患者的体征信息,实现了护理与检测的智能化。
第三类是基于智能控制系统实现的多功能集成研究,智能护理床除了能够解决失能老人日常基本生理需求和护理辅助[8],也增加交互性、舒适化、人性化、情感化等方面设计,注重智能化和功能一体化的有效结合[9]。蒋皆恢等[10]研制康复多功能护理床,具备生理参数监护、辅助睡眠、智能控温以及视频通信等功能,而多传感器与智能穿戴设备的应用[11],对健康监护、安全监测、家庭康复、疗效评测、疾病早期发现等有着积极的作用。
目前,智能护理床多集中于针对失能老人设计,在失能与半失能老人的护理群体中,很难见到专门针对半失能老人需求而设计的护理床。在上述研究基础上,本文以半失能老人的生理需要及渴望有一定的独立、自主、参与日常活动心理诉求为出发点,旨在对半失能老人能力的增强辅助,设计了一种基于移动机器人坐卧两用多功能护理床。该护理床采用移动机器人和床椅一体化设计,可以满足老人自由出行的需求,同时也可以避免老人在从床到座椅移动过程中造成的安全风险。这不仅满足老年人精神需求,也可帮助子女实时地了解父母身体健康状况,在一定程度上实现了失能老人的生活自理,有效降低了家属及护理人员的劳动强度,具有较高的实用价值。
1 产品功能的场景式设计
该护理床充分考虑了失能老人在生理和心理方面的需求,同时具备形象直观、操作简单、能够直接进行交流等特点。该护理床产品功能场景设计描述如下。
(1)日常护理。护理床首要设计原则是围绕老人日常需求及日常护理需要。对半失能老人而言,首先要生活便捷性需要和安全防护需要[12],包括支撑、防护、移动等功能,同时还要满足护理人员的便捷性需求,如起身、坐卧、翻身、吃饭、如厕、交互等多方面的问题,符合无障碍设计理念[13]。
(2)智能检测。检测老人的体征是护理的一项重要工作,护理床可通过图像、多种传感器及移动穿戴设备等,实现对环境、患者生理参数及状态的连续监测。护理床作为智能终端,将通过物联网上传数据,医护人员可以实现远程医疗,亦可通过医疗大数据实现监护、预警及环境调节等智能护理功能。
(3)移动取物。对于身体较弱智力正常的半失能老人,渴望有一定的独立、自主、参与日常活动[14]。采用移动机器人和床椅一体化设计,可以满足老人自由出行的需求,同时也可以避免老人在从床到座椅移动过程中造成的安全风险,降低护理人员的工作量。
(4)交互娱乐。子女的陪伴或看望是老人最为重要的精神需求,但是不少子女会因为工作等原因而无法陪伴在老人身边或者不能经常探望老人。视频通讯是一个不影响子女正常工作生活、又能满足老人经常见到子女的想法。将这一功能融入护理床,可以更大程度地满足老年人精神需求,也可帮助子女实时地了解父母身体健康状况。
2 系统设计
2.1 护理床机械结构设计
护理床整体围绕老人日常生活、活动及护理需要开展,整体结构设计采取坐卧两用可变换姿态设计。整体结构如图1所示。
躺卧姿态采用由12块可伸展床面构成,由支架、电动推杆及伸展机构支撑。折叠伸展设计可是床面的有效使用面积达到1000 mm²,以增加病人的舒适度;可自动升降的活动排便口,满足老人大小便的便捷需求,见图2。

图1 整体结构图
坐姿由活动床面及折叠机构完成(图3),伸缩结构可使背部腿部在0~90°自由调节,满足病人不同姿态的灵活变换;床面折叠结构使床身宽度降为600 mm,以保证护理床能够通过正常的房间门以及较狭窄通道,方便半失能病人一定的独立、自由出行。

图2 躺卧姿态变化图

图3 座椅姿态变化图
为满足半失能老人的娱乐交互需求,配备一个具有万向变换的支撑架的交互设备(图4),可以更大程度地满足老年人精神需求,也可帮助子女实时地了解父母身体健康状况;具有室内视觉导航的移动机器人(图5),可保证病人在缺乏护理人员的情况下自主移动时得到安全保护。

图4 万向变换支撑架

图5 移动机器人
2.2 控制系统设计
智能护理床的控制系统主要实现床身姿态变换控制、手势和语音交互控制、体征数据监控、安全预警等功能。控制系统的主控芯片采用ARM9的S3C2440A微处理器对电动推杆和移动机器人的控制,以实现床身姿态的变换和自主移动。控制系统结构示意图,见图6。
为便于交互病人的交互,护理床增加了语音控制技术和手势识别技术,可极大减轻病人对他人的依赖,增强半失能老人的生活乐趣和生活信心。语音控制的核心采用SPCE061A的语音芯片[15],可通过训练实现语音识别功能,语音识别完成后,将语音控制信号通过芯片输出到连接在主控芯片I/O的中断扩展芯片74LS148芯片上,即可实现语音的识别控制;而强大的微软Kinect传感器不仅可以用在游戏娱乐中,也可以很好地用在智能护理床交互之中,通过Kinect传感器[16]深度图像、手势分割、手臂区域处理、手掌检测,可实现静态手势和动态手势的识别,进而可用于护理床的交互之中,具有极好的效果。

图6 控制系统结构示意图
智能护理监控是护理工作的最佳助益,通过在护理床增加各类传感器,获取温度、姿态、体温、心率、心电图等信息,以实现对病人的实时监控,结合智能预警系统,可最大程度地减少护理工作并提供安全保护,当有异常情况时可立即做出处理。
3 人因功效分析
为进一步分析护理床的安全性与舒适性,本文采用西门子JACK软件进行护理床的人体工程学分析。研究表明,如果第四腰椎(L4)受伤,容易引起两侧腰痛、腹痛、腹胀便秘、下肢外侧麻痛。若第五腰椎(L5)受损,则会造成下肢后侧麻痛、下肢痛、月经不调等疾病。因此,很有必要计算出L4/L5处受的压力。下背部分析利用先进复杂的生理学下背部模型,计算L4/L5(第四腰椎、第五腰椎)脊椎处的压力,并将这个压力和国家职业安全与卫生研究生(NIOSH)的推荐压力及极限压力进行比较。此外,下背部分析还可以计算L4/L5扭矩、肌肉受力,并可以显示扭矩分布。因此,主要进行下背部分析和舒适度分析。考虑到病人的情况高矮胖瘦都有可能,所以选用第95百分位的中国女性作为病人。第95百分位的则为165.9 cm和66 kg。
3.1 平躺姿态分析
病人平躺在病床上(图7),通过对其下背力分析可得女性的下背部所承受的压力为915 N,远低于NIOSH标准的3400 N,说明该病床可以保护女性工作人员的脊椎。此时,下背部所受的力小于背部的承受极限,表明大部分护理人员完成该动作时背部不会受到损伤。相应的扭矩、肌肉受力和扭矩的分布如图8、图9所示。从图8和图9中可知,病人的背脊肌、斜外肌、腰直肌、背阔肌和内斜肌的受力情况及相应的扭矩,其中腹直肌的受力较大,达到了500 N。L4/L5扭矩在-100 Nm左右。
3.2 静态强度预测
静态强度预测可以从动力学的角度评估有多少百分比的人能够保持任务中的某一姿势进行工作,还可以利用Jack中特定姿势、人体测量学工具、对手施加压力来计算特定姿势下受到的转矩及转矩对肌肉的影响。通过复杂的手部受力分析和躯干扭转分析,评估姿势的强度是否符合NIOSH定义的强度标准。对病人躺在床上进行静态强度预测分析,得到如图10所示的结果。

图7 平躺姿态

图8 病人躺在病床上的下背力分析

图9 病人躺在病床上的下背部的扭矩分布(a)、肌肉受力(b)和扭矩(c)
从图10中可知,关节角度、关节转矩、平均强度都处在较合适的范围内。其膝盖脚踝处受到限制较大。如图11所示,通过对女性的舒适度分析可得,该护理床只有在头部以及脚踝处的舒适度平均值较小,其余地方均正常。
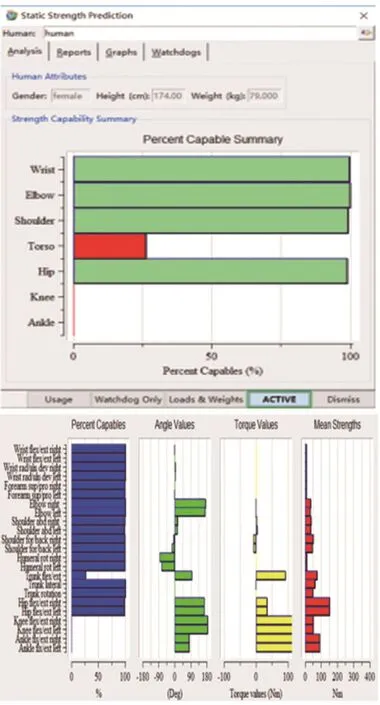
图10 病人躺在床上的静态强度分析

图11 病人在病床上的舒适度分析
3.3 坐姿模型分析
病人90°坐在病床上(图12),通过对其下背力分析可得女性的下背部所承受的压力为403 N,远低于NIOSH标准的3400 N,说明该病床可以保护女性工作人员的脊椎。此时,下背部所受的力小于背部的承受极限(图13),表明大部分护理人员完成该动作时背部不会受到损伤。相应的扭矩、肌肉受力和扭矩的分布如图14所示。从图14中可知,病人的背脊肌、斜外肌、腰直肌、背阔肌和内斜肌的受力情况,扭矩在-1 Nm左右。

图12 坐姿模型

图13 病人90°坐在病床上的下背力分析

图14 病人90°坐在病床上的下背部的扭矩分布(a)、肌肉受力(b)和扭矩(c)
病人90°坐在床上时,通过对女性的舒适度分析可得,该座椅只有在头部以及脚踝处的舒适度平均值较小,其余地方均正常(图15)。
从姿态变换时的下背承受压力来看(图16),最大压力1327 N,远低于NIOSH标准,说明对脊椎没有伤害,而从舒适度来看,只在头部和脚踝处舒适度较低。

图15 病人90°坐在床上的静态强度分析

图16 0~90°姿态变换下背压力变化图
4 结束语
本文专门针对半失能老人的护理需求和心理诉求,专门设计了一款自主移动式多功能智能护理床椅。在结构上,区别于分离式的床椅设计,本护理床在结构上采用一体化设计,通过伸展与收缩的姿态变换,结合移动机器人,实现房间自由移动取物,减轻老人对他人的依赖;在功能上,除满足日常生活及护理需要,特别增加语音识别控制和手势识别技术,强化老人的交互与娱乐,增强半失能老人的生活乐趣和生活信心;在控制上,通过加装各类传感器,获取老人的生理状态数据,以辅助护理工作并提供安全保护,辅助老人健康管理。通过人因工程学分析,在0~90°的各种姿态下,背部所受的力远小于背部的承受极限,表明该护理床对老人的安全性及舒适度符合预期。本文进行了结构、控制系统的设计及运动学、人机工程学仿真,但并进入样机制作阶段,因而在后续的研究尚有待深入。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
建材发展导向(2022年3期)2022-04-19
纺织科学研究(2021年9期)2021-10-14
现代仪器与医疗(2021年1期)2021-06-09
装备制造技术(2020年2期)2020-12-14
商品与质量(2020年41期)2020-11-09
铁道通信信号(2020年1期)2020-09-21
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
浙江工业大学学报(2017年5期)2018-01-22
