
基于MMC的直流电网换流站控制策略
2020-03-20 01:58慧范新桥
分布式能源 2020年1期
李 慧范新桥
(北京信息科技大学自动化学院,北京海淀100192)
0 引言
众所周知,电压源型换流器(voltage source converter,VSC)具有功率反转时直流侧电压极性不变、有功功率和无功功率解耦控制、无换相失败问题、谐波含量少等优点[1]。因此,基于VSC的多端柔性直流(multi-terminal flexible direct current,MTDC)输电技术在异步电网互联、城市直流输配电以及解决大规模分布式电源并网等领域具有一定技术优势[2]。
随着电力电子技术的迅速发展,模块化多电平换流器(modular multilevel converter,MMC)以其模块化设计、输出波形谐波含量低、结构灵活便于扩展等优点已成为柔性直流输电系统的首选换流器拓扑[3-4]。我国已投运的南澳岛三端柔性直流输电工程[5]、舟山五端柔性直流输电工程[6]及张北四端柔性直流电网示范工程[7]的换流阀均采用这种拓扑结构。基于MMC的多端柔性直流输电系统能够实现多电源供电、多落点受电,具有经济性、灵活性、可靠性等特点[8],将成为未来直流电网发展的重要方向[9]。此外,在提升电能传输容量方面,基于MMC的直流电网比交流电网更有优势,更适合于接纳分布式清洁能源构建能源互联网。
目前,国内外学者在基于MMC的多端柔性直流系统换流站级控制策略方面开展了一系列研究。文献[10]针对背靠背MMC-HVDC的应用需求,提出了一种新型控制策略,将调控有功功率(或直流电压)的任务由传统控制策略的一侧换流器单独承担变为由两侧换流器同时响应,提高了控制的灵活性和系统的响应速度,但该策略能否应用于多端柔性直流输电系统仍有待探究。文献[11]针对MMC常规控制策略抗干扰能力低、输出不稳定等缺点进行了改进,将外环控制由开环改为闭环,并加入暂态故障控制模块,有效改善了系统的暂稳特性,但系统的反应速度稍有降低。文献[12]针对多端柔性直流输电系统强非线性和不确定性的特点,提出了一种基于指数趋近律的滑模电流控制策略,并设计相应的滑模电流控制器替代原有的内环比例积分(proportional integral,PI)控制环节,但该策略增加了控制的复杂程度。
目前,现有多端系统换流站控制核心大多采用传统的双闭环控制,虽然在一定程度上缩短了反应时间,但其结构对于异常工况或扰动等仍然不能准确地控制,无法保证系统的可靠性以及抗干扰性。本文针对外环PI控制传递函数中闭环零点不在原点的缺陷,引入改进型的PI控制,同时为了进一步提高有功功率外环控制器的动态性能,还加入电压下垂控制环节,提出组合的控制策略,有效弥补了传统控制的缺点。利用PSCAD/EMTDC仿真平台搭建了基于MMC的四端直流电网仿真模型,算例结果表明了所提控制策略的正确性和有效性。
1 基于MMC的直流电网换流站控制策略
多端柔性直流输电系统具有串联、并联及混联3种接线方式[13]。无论哪种接线方式,都必须满足其中一端换流站实现直流侧电压的控制,工程上常用主从控制来实现。本文以四端MMC-MTDC直流电网为例进行分析,其系统结构如图1所示。需要指明的是,本文涉及的交流系统均为强系统。
1.1 传统的双闭环控制策略
基于MMC的柔性直流电网换流站的控制策略中,最常用的是双闭环矢量控制。外环控制又分为有功类控制和无功类控制,前者包括直流电压控制和有功功率控制,后者包括无功功率控制;内环则是电流控制环[14]。图2为MMC换流站的控制结构图。
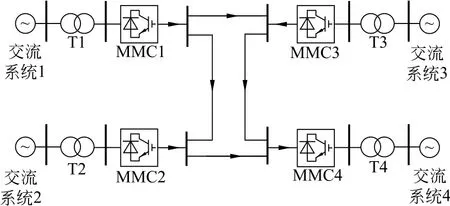
图1 基于MMC的四端直流电网结构图Fig.1 Structure of MMC-based four-terminal DC grid

图2 MMC换流站的控制结构图Fig.2 Control structure of MMC station
1.2 组合控制策略
1.2.1 改进型的外环PI控制
采用经典的双闭环PI控制时,由于外环PI控制传递函数中存在较大的微分项,闭环零点的位置不在原点,当系统受到扰动时,控制器的动态响应会产生较大的超调量,导致系统的动态特性变差[15],这种现象在模块化多电平变换器控制系统中尤为突出[16]。因此,本文提出在换流站外环控制器中引入改进型的PI控制策略。
图3为改进型的PI控制框图,以有功功率控制为例。这种控制策略是将传统PI中处于前向通道的比例系数(kp1)转移到反馈通道中,使其由串联校正作用转变为局部反馈调节作用,以此减小控制系统在动态响应时的超调量,更有助于提高系统稳定性[17]。
在实际运行中,考虑到外环功率的响应速度远远低于内环电流的响应速度,可近似认为电流能够完全跟踪其参考值,即Gp(s)=1,于是得到改进PI控制策略下有功功率控制的传递函数为
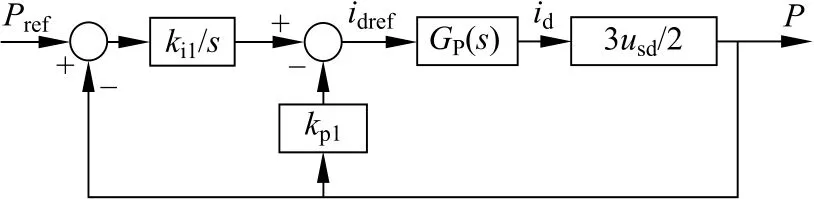
图3 改进型PI控制框图Fig.3 Improved PI control diagram

式中:G(s)表示有功功率控制的传递函数;P(s)表示换流站有功功率的实际值;Pref(s)表示换流站有功功率的给定值;usd表示交流电源处电压的d轴分量;kp1和ki1分别表示有功功率外环PI控制的比例系数和积分系数。
式(1)的分子中只含常数项,表示其零点位置均在原点,从而降低了传统PI控制器中微分项对系统控制的不利影响。就对参考值的跟踪速度而言,若选择较大的积分增益ki1值,改进型PI控制比同等条件下传统PI控制更快,更好地实现了系统快速响应的要求。
1.2.2 电压下垂控制
为了进一步提高有功功率外环控制器的动态性能,本文提出在改进的有功外环PI控制器中加入电压下垂控制环节,可以对有功功率的期望值按照直流电压下垂特性进行实时调整,快速有效地跟踪期望值,实现各换流站间有功功率的平衡,从而稳定直流侧电压[18]。比较udc与udcref得到直流电压不平衡量,再乘以下垂系数k即可得到有功功率期望值的修正量。于是,电压-有功下垂控制表达式为

式中:P'ref表示修正后的有功功率期望值;udcref和udc分别表示直流电压期望值和实际值;k表示下垂控制系数;Pref表示有功功率期望值。
综上,本文提出的基于MMC柔性直流电网换流站级的控制策略是:定直流电压控制和定无功功率控制均采用改进型PI控制策略,定有功功率控制则采用改进型PI与电压下垂的组合控制策略。改进后的MMC换流站控制结构如图4所示。
2 仿真验证
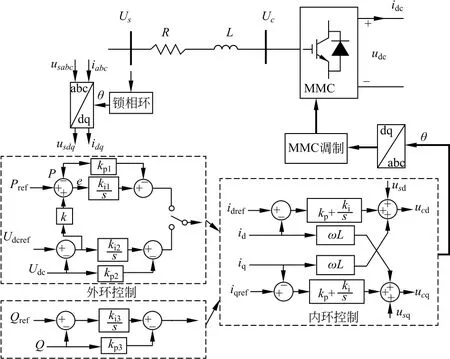
图4 改进后的MMC换流站控制结构图Fig.4 Improved control structure of MMC station
为了验证本文提出的换流站级控制策略正确性和有效性,采用图1四端系统在PSCAD/EMTDC环境下建模进行仿真分析。该四端系统中的3个换流站(MMC1、MMC2和MMC3)分别发出260、100和40 MW的有功功率,另外一个换流站(MMC4)接收400 MW有功功率。换流站MMC4为主站,采用定直流电压-定无功功率控制;其余换流站为从站,均采用定有功功率-定无功功率控制,其中MMC2还可以实现定有功和定直流电压两种方式下的切换控制。仿真系统各换流站的控制器参数如表1所示。
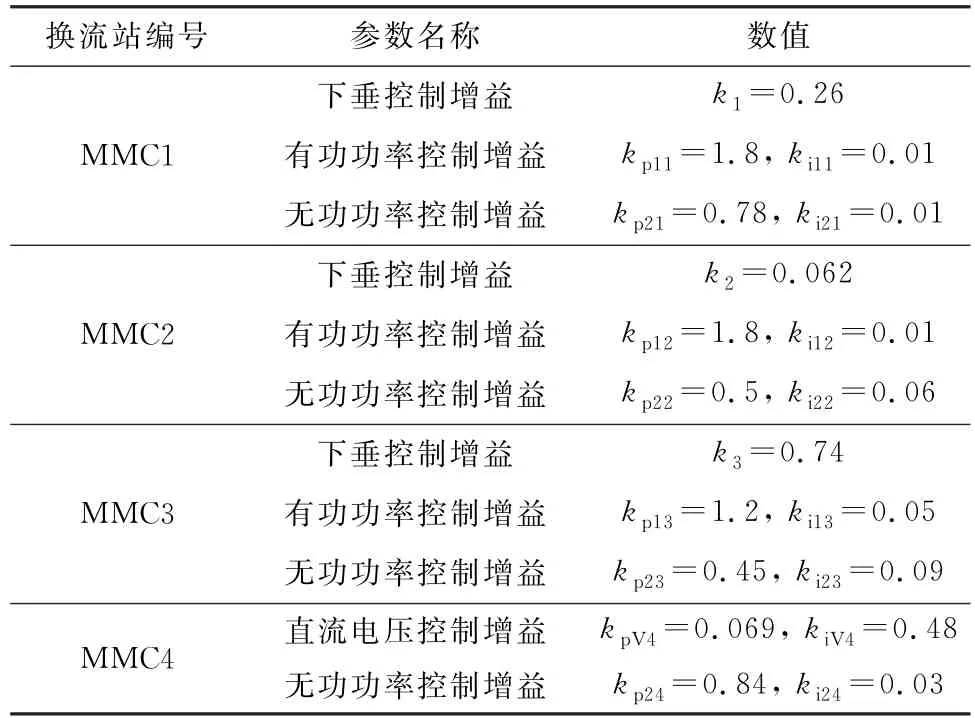
表1 换流站控制器参数Table 1 Control lerparametersofconverterstations
2.1 稳态仿真
所有换流站采用本文提出的控制策略,当系统运行在稳态时,各换流站有功功率及直流侧电压的仿真波形如图5所示。设置系统仿真总时长为5 s。
从图5(a)可以看出,系统稳态运行时,各换流站的有功功率依次为260、100、40和-400 MW,其中正功率值表示发出有功,负功率值表示吸收有功,说明控制系统能将各有功功率控制到其期望值,且系统有功功率保持平衡。同时,图5(b)中直流侧电压运行在400 kV,说明直流电压也实现了对期望值的控制,整个系统能够保持良好的稳定性。
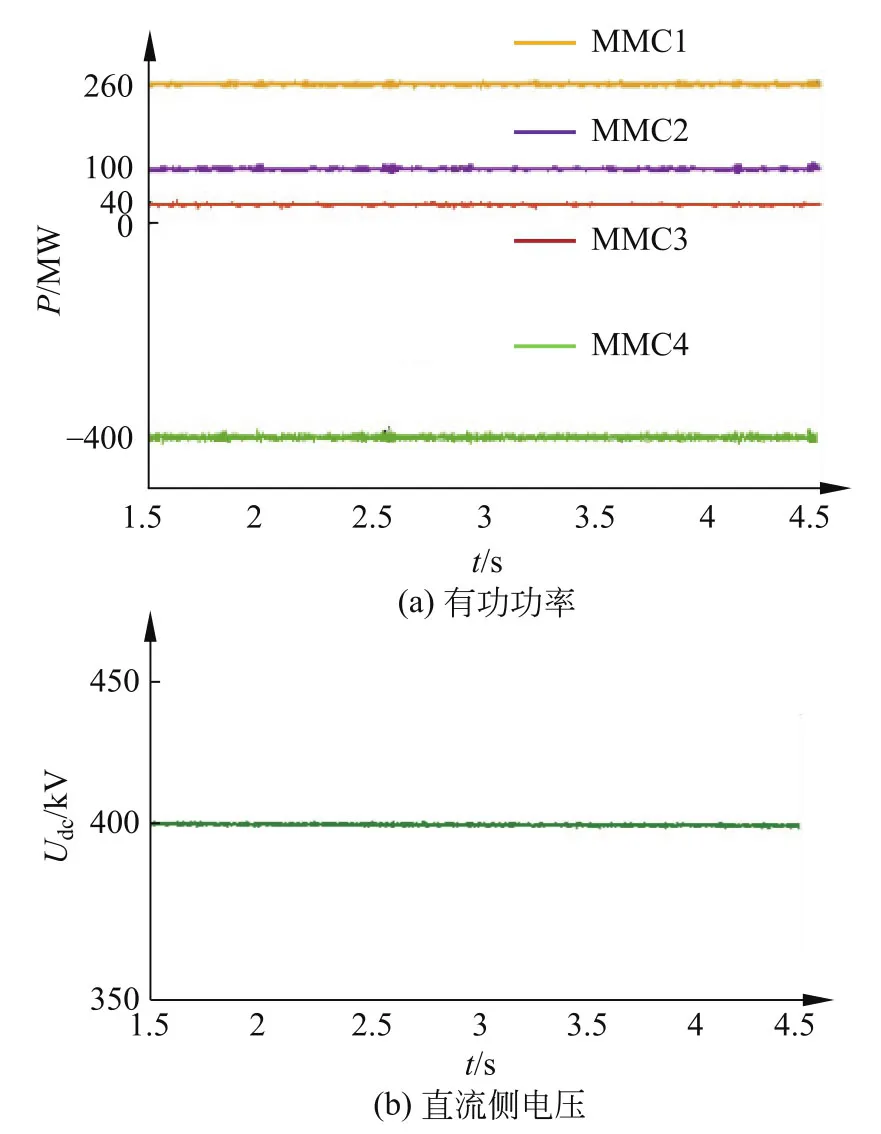
图5 系统稳态运行的仿真波形Fig.5 Simulations for system steady-state operation
2.2 主换流站因故障退出仿真
对于采用主从控制的多端直流系统,当主换流站因故障退出运行时,从换流站就要由原来的定有功功率控制切换为定直流电压控制,从而承担保持系统直流侧电压稳定的责任。为了验证本文所提出的控制策略也适用于主站退出、从站切换控制的情况,设置主站MMC4在t=3 s时切出,同时从站MMC2按照图4控制策略由定有功控制切换为定直流电压控制,相应的增益设置为kpV2=0.069和kiV2=0.48。总仿真时长为5 s,仿真结果如图6所示。
从图6(a)可以看出,当主站MMC4因故退出运行时,其有功功率由400 MW降为0 MW,从换流站MMC2替换为主站发挥系统有功功率调节作用,其有功功率由100 MW变为-300 MW,另2个换流站功率发生波动后又快速稳定到原始值。由图6(b)可见,因系统有功功率出现一定缺额,使得直流电压有所下降,并最终稳定在350 kV。由此可见,新的控制策略能够满足主换流站因故障退出运行后,其他换流站快速恢复稳定运行的要求。
2.3 控制策略对比仿真
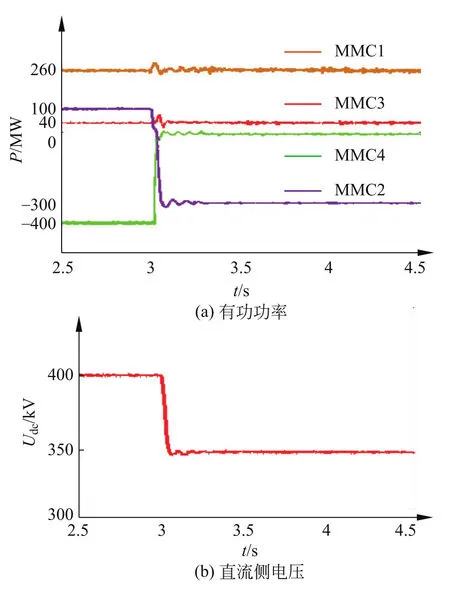
图6 主站MMC4退出运行的仿真波形Fig.6 Simulation of the master station MMC4 outage
为证明本文提出的控制策略比传统双闭环PI控制更有效,分别从有功功率波动、直流电压波动两种工况进行比较。方法1采用本文提出的策略,方法2采用传统双闭环PI控制策略。两种方法下对应的PI参数保持一致。
2.3.1 有功功率波动仿真
假设某时刻交流系统3的有功功率发生变化,由40 MW增大到60 MW,再减小到40 MW。设置从换流站MMC3有功功率期望值在t=2 s时由40 MW升至60 MW,并在1 s后恢复到初始状态,仿真总时长为5 s,各换流站有功功率及直流侧电压的仿真结果如图7所示,图中红色代表本文提出的策略,绿色代表传统双闭环PI策略。
从图7可以看出,当交流系统3(换流站MMC3)的有功功率发生波动时,交流系统4(换流站MMC4)作为直流系统的平衡节点,进行了反向等量功率的变化,其接收功率由400 MW升到420 MW,并在1 s后又降至400 MW,以达到系统有功功率平衡的目的,而其余两站的有功保持不变;由图7(e)可知,系统直流侧电压因换流站MMC4功率波动也出现了相应的波动。此外,以图7(b)为例比较两种控制策略的优劣,可以看出:相比于方法2(即常规PI控制),方法1能够有效地降低波形的超调量,快速地跟踪期望值,从而缩短了系统动态响应速度,提高了运行效率,更好地实现了系统功率平衡和直流电压稳定。
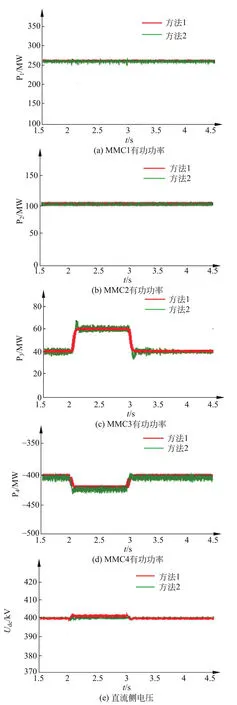
图7 交流系统3功率波动时两种策略的波形对比Fig.7 Comparison of two strategies when the active power fluctuates in 3#wind farm
2.3.2 直流侧电压波动仿真
假设某时刻直流侧电压发生变化,由400 kV突变到450 kV,再减小到380 kV。设置换流站MMC4直流电压期望值在t=2 s时由400 kV升至450 kV,当t=3 s时又降为380 kV。仿真总时长为5 s,典型换流站的有功功率和直流侧电压的仿真结果如图8所示,图中红色代表本文提出的策略,绿色代表传统双闭环PI策略。
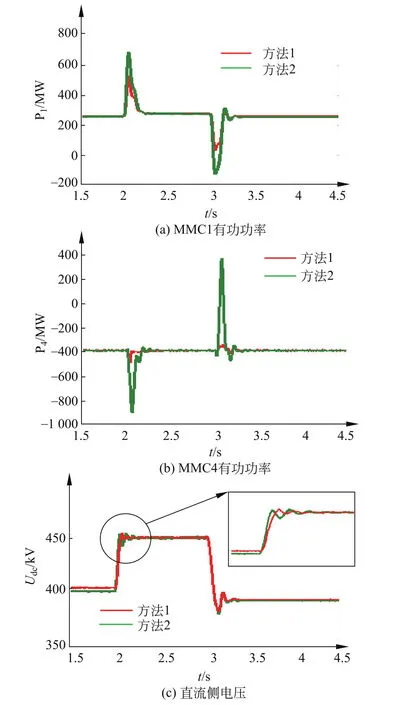
图8 直流侧电压波动时两种策略的波形对比Fig.8 Comparison of two strategies when DC voltage fluctuates
由图8(a)和8(b)可见,当直流电压发生波动时,各换流站的有功功率均出现了明显的过冲,但是因有功控制采用改进PI与电压下垂控制策略,其过冲的幅度明显小于传统PI控制,功率在扰动后能迅速回到初始工作运行点。由图8(c)可以看出,采用方法一的控制策略时,直流侧电压在初始状态更接近期望值400 kV,当电压由400 kV升到450 kV时,电压上升率有所降低,波动幅度明显减少,跟踪新的期望值速度加快,其控制效果优于方法二的控制。
3 结论
本文提出一种适用于MMC的柔性直流电网换流站级控制策略,即有功功率外环控制器采用改进PI控制和电压下垂控制的组合方式,无功功率和直流电压的外环控制器均采用改进PI控制。电磁暂态仿真软件PSCAD/EMTDC的仿真结果表明,所设计的控制策略简单,易于实现,且在稳态运行、主站因故障切除、从站有功功率波动、直流侧电压波动等各种工况下,控制效果显著,既减小了振荡幅度,又能够缩短扰动后恢复时间,具有良好的稳定性和抗干扰性。
未来电网的形态将变为柔性互联的交直流系统,分布式能源的接入会给柔性互联交直流系统稳定性带来影响,有必要进一步研究接入弱交流系统的直流电网系统级控制策略问题。
猜你喜欢
园林科技(2021年2期)2022-01-19
石油沥青(2021年1期)2021-01-11
中医眼耳鼻喉杂志(2019年2期)2019-04-13
石油沥青(2018年4期)2018-08-31
通信电源技术(2018年3期)2018-06-26
筑路机械与施工机械化(2018年1期)2018-03-06
军事运筹与系统工程(2017年1期)2017-07-31
妈妈宝宝(2017年4期)2017-02-25
广西电力(2016年4期)2016-07-10
湖北电力(2016年8期)2016-05-09
