
基于互相关原理的流速测量技术及算法研究
2020-03-24 11:10包文运崔依冬王启昌沈德魁
科学技术创新 2020年2期
包文运 崔依冬 王启昌 沈德魁
(1、江苏省南京市大唐环境产业集团股份有限公司特许经营分公司,江苏 南京211100 2、东南大学,江苏 南京210018)
1 概述
多相流系统广泛存在化工、能源、环保等各个工业领域,其中每个领域基本都会涉及多相流测量,但由于多相流流动的复杂性,使得多相流流动参数的测量存在着众多难点,而流速作为基础且重要流动参数,其有效的测量也是一个重点研究的方向。而基于互相关原理的流速测量技术凭借互相关算法在多相流测量方面的优越性,成为多相流测量领域热点的研究领域之一[1]。20 世纪60 年代初,欧洲研究人员就利用互相关原理测量物体移动速度和工业管道内部流体速度,70 年代,英国、美国、德国、日本等国都先后开展了相关研究工作,表明基于互相关原理的流速测量技术在多相流测量方面的潜力。80 年代初期,我国各科研院所逐步开展基于互相关原理的流速测量技术的研究工作,并取得一定研究成果。90 年代后至今,如何处理随机信号,优化传感器、设计互相关计算器、建立流速测量模型、扩大应用领域成为基于互相关原理的流速测量新的研究方向。在本文中,首先介绍互相关测速的基本原理,之后对几种算法进行对比分析,最后论述基于互相关原理的流速测量技术的未来研究方向。
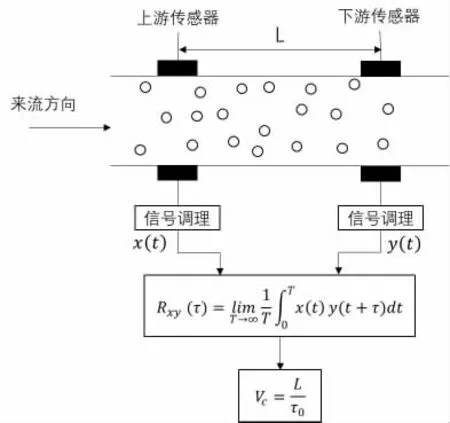
互相关测速的原理图
2 互相关测速的基本原理
互相关测速的原理如前图所示,利用在被测流体管道上布置两个相同特性的传感器,上下游传感器的间距为L[d]。当被测流体在管道内流动时,上下游传感器将捕获流体流动产生的随机噪声信号x(t)和y(t),当上下游传感器距离L 足够小,那随机噪声信号x(t)和y(t)将基本相同,只是下游传感器捕获的随机噪声信号y(t)较上游传感器捕获的随机噪声信号x(t)有一定的延迟
通过计算随机噪声信号x(t)和y(t)的互相关函数Rxy(τ),其计算公式如下

而互相关函数的峰值对应的时间τ0,也就是流体流过上下游传感器的时间,称为流体的渡越时间τ0。那么相关速度则可以表示为:

但由式(2)求得的相关速度并不能完全代表流体的流动速度,一方面是由于上下游传感器所捕获的流动噪声信号并不是完全相似,另一方面传感器截面每一点对流动噪声信号的贡献程度不一。所以实际流体流动的速度V 与相关速度Vc之间存着一个校正因子K:

虽然众多研究人员校正因子K 的确定进行了大量工作,但影响校正因子K 的因素众多,例如流体流型,相含率等,导致校正因子K 难以找到具有统一的表达式,目前仍需进一步探索速度V 与相关速度Vc之间的关系。
3 互相关算法
3.1 基于时域的互相关算法
经数据采集卡采集后模拟信号x(t)和y(t)转换为离散信号xi和yi(i=0,1,2,3,…,N-1),则离散后的相关函数为:

Rxyk的最大值对于的K0则表示离散后渡越时间τ0对应的延迟点数,两者近似满足以下关系式:

其中,Δt 表示采样的间隔时间。
则相对速度仍有式(2)计算所得,此外由式(4)可见,每计算一个Rxyk值需要进行N+1 次乘法运算、N-1 次加法运算,完成全部运算需进行N*(N+1)次乘法运算和N*(N-1)次加法运算,这就要求运算器需达到一定的计算速度才能满足实时性的要求。
3.2 基于频域的互相关算法
基于频域的互相关算法是通过对离散信号xi和yi(i=0,1,2,3,…,N-1)进行快速傅里叶变换,获得离散信号xi和yi互功率谱估计,再进行傅利叶逆变换获得互相关函数Rxyk[2]。
在求取相关函数Rxyk之后,进而求出渡越时间τ0,从而获得相对速度。相对于基于时域的互相关算法,基于频域的互相关算法的运行速度可得到一定的提升。
3.3 极性互相关算法
极性互相关算法的如式6 所示,具体过程如图4 所示,通过对两个离散信号xi和yi(i=0,1,2,3,…,N-1)进行量化处理,处理过后的信号取值仅为0,1 或者-1,1,此时乘法运算将转换为比较两个量化信号的符号的加法运算。在求出Rxyk最大值对应的序号后,即可完成渡越时间和相关速度的求解。

式中:
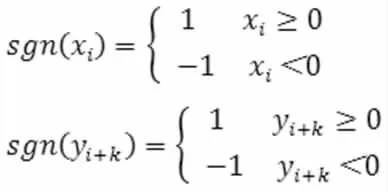
由于采用量化思想,数据处理相对简单,极性互相关可大减少运算速度[3],同时相比与以上两种算法,极性互相关可以通过较为简单的硬件电路实现,而且在实际使用过程中也取得了良好的应用效果。
除上述几种互相关算法外,还有梯度互相关、广义互相关等互相关算法,均可实现渡越时间和相关速度的计算。
4 基于互相关原理的流速测量技术的研究方向
4.1 传感器设计的指标
目前已有压力传感器,静电传感器,电容传感器,超声波传感器等几种传感器应用于互相关测速,但相关设计指标并不明确,尤其是静电传感器和电容传感器设计上较为模糊,仅有空间灵敏度作为评价指标,如何设计出场均匀度一致的传感器将对相关速度的物理意义的明确提供巨大的帮助。此外,由于工业应用条件往往极其恶劣,如何设计出适应能力强,稳定性优异的传感器也是值得研究的重要方向。
4.2 相关速度的物理意义
由于上下游传感器所捕获的流动噪声信号并不是完全相似和传感器截面每一点对流动噪声信号的贡献程度不一,导致相关速度的物理意义并不十分明确,对于简单的流动情况而言,例如单相流动,可以认为相关速度为管道流动截面的平均速度,而对于多项流动,相关函数有时会表现为多峰函数,这也就带来多个相关速度值,每个相对速度所代表的含义更加不明确,是流动噪声信号异常波动带来的系统误差还是代表截面某一区域或某种成分的速度都不得而知。
4.3 校正因子的确定
与其他测量设备一样,基于互相关原理的流速测量同样需要校正因子,以保证测量的精度[4]。虽然目前国内外搭建不少标定装置用于确定校正因子,但这些标定装置的应用范围较为单一,通常只能适用于某种特定的流动状态。所以校正因子的确定值得深入研究。
猜你喜欢
能源工程(2022年2期)2022-05-23
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
大众科学(2020年7期)2020-10-26
国学(2020年1期)2020-06-29
家庭影院技术(2018年11期)2019-01-21
小天使·六年级语数英综合(2018年1期)2018-10-08
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
