混凝土布料流量模糊PID控制算法研究
2020-03-24 06:57蒋永翔邓三鹏段景乐孙宏昌祁宇明
天津职业技术师范大学学报 2020年1期
王 彤,蒋永翔,邓三鹏,段景乐,孙宏昌,祁宇明
(天津职业技术师范大学机器人及智能装备研究所,天津 300222)
混凝土布料机器人作为改善工人工作环境,提高劳动强度的智能制造设备,精确的流量控制是确保混凝土输送过程中稳定性和智能性的关键。为保证布料均匀,实时布料流量需与机器人工作路径下的速度相匹配。混凝土是典型的大滞后、非线性流固耦合系统,布料输送管内部压力变化会导致大的流量波动,因此仅依靠流体的流动特性很难实现均匀稳定的流量传送[1]。若混凝土实际流量小于理论流量,浇筑中会因混凝土不足导致裂缝,出现混凝土局部结构酥松,形成类似蜂窝状的窟窿、孔洞等浇筑缺陷;反之,浇筑量过大则会影响浇筑的平坦性,出现夹层,凹凸不平等现象[2]。这就要求对混凝土流量与稳定性进行精确的控制。
针对这种滞后、非线性流固耦合系统的流量控制,国内外学者研究了PID 控制法[3]、模糊控制法[4]、模糊自整定PID 法[5]、预测模糊PID[6]等方法。文献[3]将PID 流量控制法应用于净化过滤机的流量控制中,利用PLC 的连续PID 控制模块结合变频调速实现了净化过滤系统中电解液的PID 流量调节。文献[4]在研究矿质冶炼进液流量控制系统中运用了模糊流量控制法,阐述了模糊控制系统的结构以及模糊控制器的实现思路,针对尾液浓度对给定进料流量的影响进行了研究。文献[5]就矿井注水流量控制问题展开研究,针对注水流量自动控制受地层压力影响所体现的非线性,研究了基于模糊自整定PID 控制算法的注水流量精确控制。需要指出的是,目前的流量控制研究主要针对水、浆、液等小阻力流体,针对混凝土类非牛顿流体的流量控制,国内外研究尚有不足。混凝土流固耦合系统输送过程中阻力大、能耗多,在管道中的流动阻力根据不同的管壁材料具有较大的差异性。混凝土在流经输送管道时,除产生拉伸流动、剪切流动外,还伴有滑黏形式的壁面滑移现象[7],因此非牛顿流体的流量控制很难建立数学模型。此外,从PID 控制的关键环节流量监测的准确性上看,其以误差和误差变化率作为输入变量,无积分环节,稳态误差较大,常规的PID 流量控制精度难以保证。因此,本文研究了一种基于模糊PID 的混凝土布料机器人流量控制算法,通过MATLAB fuzzy 工具包仿真获得了稳定的流量输出结果。在搭建的布料机器人流量控制系统实验平台上进行实验验证,得到了稳定的流量输出。
1 布料机器人流量控制系统设计
混凝土布料流量控制系统框图如图1 所示,系统主要由变频器、电机、蠕动泵,高黏度流量计、模糊PID控制器组成。搭建布料机器人流量控制实验平台如图2 所示。
布料流量控制系统在开始工作时,先启动变频调速电机使蠕动泵的转速达到预期输送理论流量的转速值,再通过高粘度流量计[8]监测实际布料流量值[9],将实际测量值与理论值进行比较运算,获得流量偏差值作为模糊PID 的输入信号。进而将输出信号PID 的调节值 ΔKp,ΔKi,ΔKd传递到变频器,使其控制蠕动泵电机的转速,以实际测量流量值与理论值差值最小为目标,实现流量的调节。
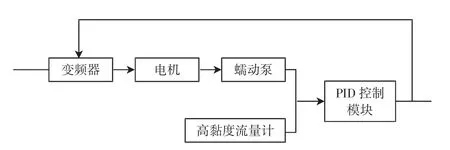
图1 混凝土布料流量控制系统框图
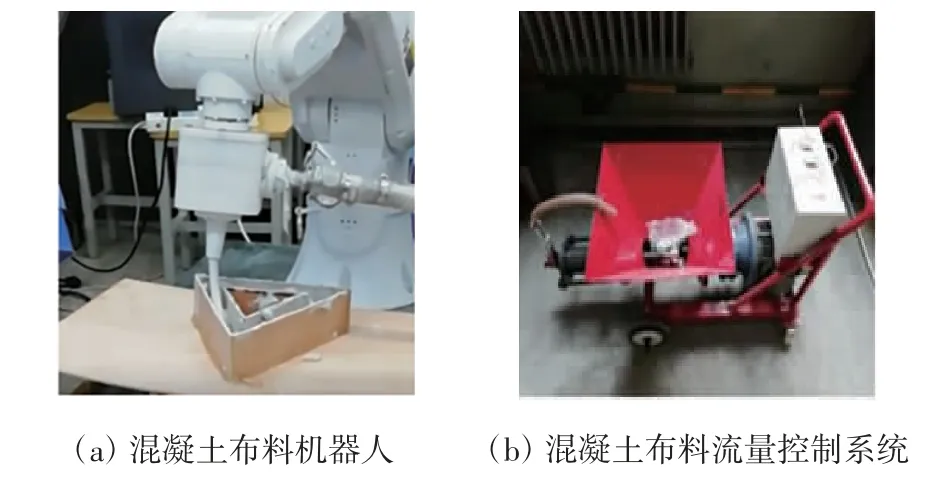
图2 布料机器人流量控制实验平台
2 基于模糊PID的混凝土流量控制算法
2.1 模糊PID算法控制原理
随着混凝土黏度的增大,流量控制的非线性特性增加,常规PID 算法针对此类流体,控制精度难以满足要求。模糊控制器具有无需建立被控对象的数学模型以及针对被控对象的非线性适应能力强等优点,可通过自动调整PID 参数达到控制无振荡的要求。针对混凝土高黏度滞后的非线性特点,采用模糊PID 控制方法,实现对PID 控制器输出量的整定,达到较高的控制精度,模糊PID 控制原理图如图3 所示。

图3 模糊PID 控制原理图
模糊PID 控制原理包括以下3 个步骤:
(1)将混凝土流量实际测量值与理论值进行比较运算,其差值和差值变化率作为模糊控制器的输入;
(2)按照模糊控制规则进行模糊推理,获得输入量与输出控制量的隶属度表;
(3)经过解模糊化处理得到模糊输出控制量,作为变频器的输入以控制电机转速[10]。
2.2 模糊PID控制算法的输入量
2.2.1 混凝土蠕动泵理论布料流量计算
混凝土蠕动泵工作原理图如图4 所示,随着压轮的转动,通过压轮压紧泵管,使泵管内的流体被挤压而实现泵对混凝土的输送[11]。

图4 混凝土蠕动泵工作原理图
根据蠕动泵的工作原理,其每转一圈所运送的混凝土的流量是固定的,所以通过调节泵的转速即可控制瞬时流量。蠕动泵固定流量的计算图解如图5 所示。压轮转子由位置A 运动到位置B,输送混凝土的体积为弧形管道AB 的体积,即

式中:D 为泵壳圆周节圆直径;V 为弧形管道AB 段的体积;θ 为由 A 到 B 转动的角度;d 为泵管直径。
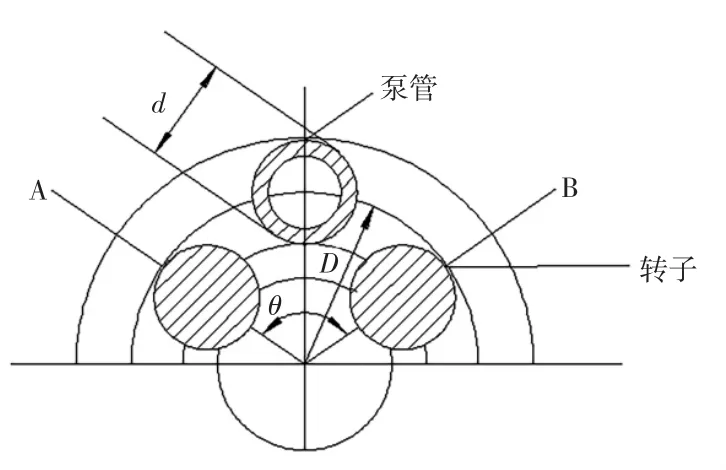
图5 蠕动泵固定流量的计算图解
根据式(1),蠕动泵转动一圈输送的理论流量为

因此,蠕动泵的理论流量为

式中:Q 为蠕动泵运送混凝土的理论流量(即总流量);n 为蠕动泵所转圈数。
2.2.2 模糊控制器输入量的确定
本文中模糊控制器的输入量是通过蠕动泵电机转速计算获得的理论流量值Q 和高黏度流量计监测的实际布料流量值y(k)的差值e(k)和差值变化率Δe(k)所得到的,则

将 e(k)和 Δe(k)输入到 PID 后,即对其进行模糊化,通过PID 控制器完成流量控制。
2.3 模糊PID控制算法的模糊推理
2.3.1 选择论域并建立适当的模糊控制规则
基于模糊控制变量设计论域是构建模糊控制规则的前提。现将输入变量与输出变量的模糊子集设为负大、负中、负小、零、正小、正中、正大,用字母对应表示为{NB,NM,NS,ZO,PS,PM,PB};则其模糊论域可表示为{-3,-2,-1,0,1,2,3};使之成为一种控制规则库[12],ΔKp,ΔKi,ΔKd模糊控制规则表如表1所示。第1 个为Kp状态,第2 个为Ki状态,第3 个为Kd状态。
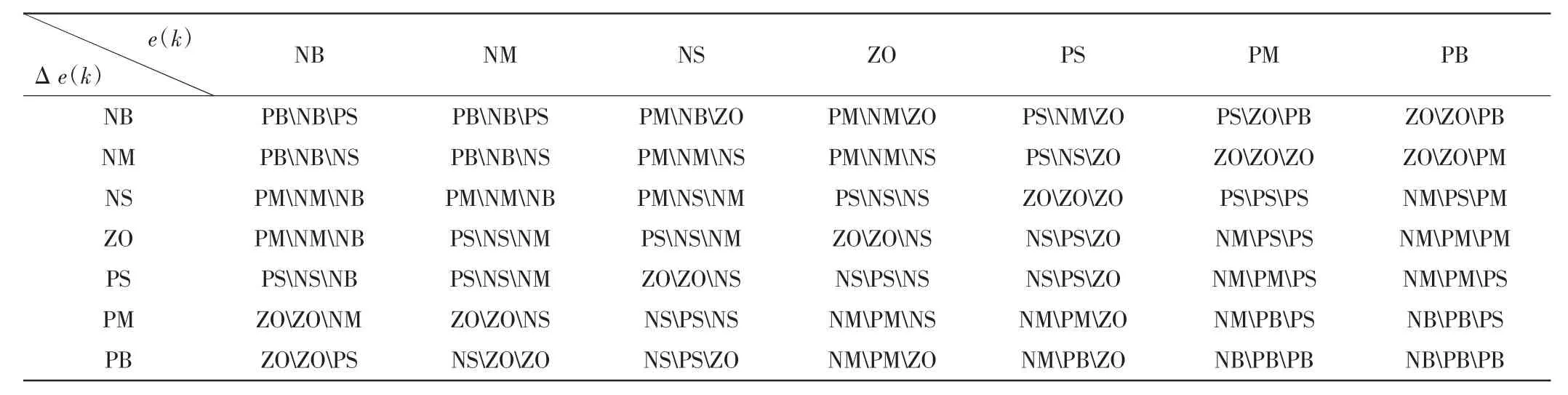
表1 ΔKp,ΔKi,ΔKd 模糊控制规则表
2.3.2 模糊推理
当输入量 e(k)和 Δe(k)的绝对值较大时 e(k)为大或中,对应论域分别为±大或±中。为了降低调整时间,Kp值应较大(Kp对应论域为 PB、NB);为了防止控制过程中系统出现较大的超调量且保证在系统可控范围内,应限制积分环节,Ki、Kd值应较小(对应论域为 PS、NS)。
当输入量 e(k)和 Δe(k)的绝对值适中时,e(k)为中或小,对应论域分别为±正或±中。为了降低调整时间,Kp值应稍微降低(Kp对应论域为 PM、ZO);为了增强控制效果,保证系统响应速度,Ki、Kd值应适中(对应论域分别为PM、NM)。
当输入量 e(k)和 Δe(k)的绝对值较小时,e(k)为小或0,对应论域分别为±小或0。为了获得较好稳态性能,Kp、Ki值应较大(对应论域为 PM、NM);此时系统可能出现振动,当误差趋向减小时,Kd取较大值,(对应论域为PB),当误差趋向增大时,Kd值为0,(对应论域为ZO)。
2.4 模糊PID控制算法的解模糊化
解模糊化是转化模糊量为精确量的过程,通过推理获得模糊集合后从中选取隶属度最大的量,使其作为清晰量。设A 集合为模糊输出量,隶属度函数中有一个最大值μA,则可直接将其确定为清晰量,其对应的数学表达式为

式中:z0为清晰量;z 为模糊量。
假设论域不存在1 个或几个最大元素,则其清晰值可确定为元素的平均值,通过计算各元素的平均值[13],获取精确的输出量 ΔKp,ΔKi,ΔKd。

式中:输出值ΔKp,ΔKi,ΔKd为初始值与增量修正值的和。
3 布料机器人模糊PID流量控制算法验证
在Matlab 命令窗口输入“fuzzy”,选取二维控制结构,将混凝土蠕动泵理论流量与高粘度流量计测得的实际流量值的差值和差值变化率作为输入[14],将控制变频器的 ΔKp,ΔKi,ΔKd作为输出。然后在设计界面将e(k)和 Δe(k)添加到输入变量,将 ΔKp,ΔKi,ΔKd添加到输出变量。
根据已定义的输入变量 e(k)和 Δe(k)的模糊子集,对应的将负大记为NB,将负中记为NM,将负小记为NS,将零记为Z0,正小记为PS;正中记为PM、正大记为PB;同样定义相关输出变量的模糊子集。
选取分辨率较高的三角形隶属函数曲线描述e(k),且输入变量 Δe(k),输出变量 ΔKp,ΔKi,ΔKd的隶属度函数图像与Δe(k)一致(横坐标为模糊论域,纵坐标为其对应的隶属度),如图6 所示。

图6 输入值e(k)的隶属函数
根据表1 的模糊规则,对3 个输出量进行自适应校正,列出关于 ΔKp,ΔKi,ΔKd的 49 条模糊控制规则。最终通过此种控制方法得出模糊PID 仿真获得的流量计算值与高黏度流量计测量值随时间的变化规律图如图7 所示。
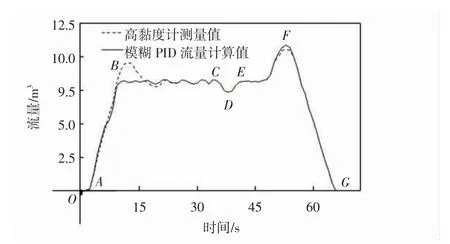
图7 测量值与计算值的规律图
仿真计算值与测量值通过模糊PID 调节后流量逐渐稳定[15]。图中,O-A 段表示当转速未达到工作转速时,蠕动泵无法进行送料,因此流量计未检测出流量;A-B 段表示随着转速增大,流量也随之增加;B-C 段表示当转速达到某一固定值时,流量值也相对稳定下来,为稳定布料阶段[16];C-D-E 段表示由于混凝土中混有杂质,所以会出现点D、E 等波峰、波谷,但在E后,由于模糊PID 的调节作用,也恢复了稳定;F-G 段表示临近布料结束泵底的混凝土难以输送,需将转速继续调大达到峰值F 点,最终至G 点输送完毕。
4 结 语
本文设计了一种基于模糊PID 的混凝土布料机器人流量控制算法,通过PID 控制器对蠕动泵的调节实现布料机器人对流量的精确控制,可实现浇筑平整、无孔洞,提高了混凝土浇筑的质量。通过以上验证可知,采用模糊PID 控制算法实现布料流量控制,突破了混凝土作为大滞后、非线性流固耦合系统难以建模等问题,确保流量在可控范围内均匀稳定输送,解决了混凝土布料机器人精确流量控制的问题。
猜你喜欢
选煤技术(2022年2期)2022-06-06
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2016年21期)2016-05-17
空间控制技术与应用(2015年4期)2015-06-05
舰船科学技术(2015年8期)2015-02-27