基于模型预测控制的无人机避障路径规划方法
2020-03-27 06:35代进进李相民唐嘉钰吴小鹤
火力与指挥控制 2020年1期
代进进,李相民,薄 宁,唐嘉钰,吴小鹤
(海军航空大学,山东 烟台 264001)
0 引言
无人机(Unmanned Aerial Vehicle,UAV)具有隐蔽性好、机动性强、成本较低等特点,近年来在军事领域有着较为广泛的应用,逐渐成为完成战术侦察、压制敌防空系统等战术任务的主要武器。UAV飞行过程中,飞行环境信息难以完全预知,可能遇到突发障碍。为保证作战任务的顺利实施,UAV 飞行路径规划中在线实时避障能力至关重要。本文针对UAV 飞行过程中的避障问题采用模型预测控制策略,提出了无人机状态空间预测模型,对无人机路径进行预测控制。
1 模型预测控制的基本思想
模型预测控制是一种基于在线优化的控制策略。在每个采样时刻,它根据有限时域内对象的历史信息和未来输入,利用对象预测模型预测系统的未来输出,通过某一性能指标优化对象的未来控制输入,求解一个开环最优化问题,得到一个控制序列,并将该控制序列的第一个控制量作用于被控对象。在下一个采样时刻,利用新的状态测量重新求解开环最优化问题,从而形成闭环控制[1]。模型预测控制的结构框图如图1 所示。
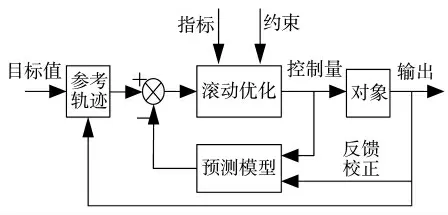
图1 模型预测控制原理框图
相对于传统的最优控制算法,预测控制优化不是采用一个不变的全局优化指标,而是采用有限时域的滚动优化策略。在每一采样时刻,优化性能指标只涉及从该时刻到未来有限的时刻。因此,预测控制在每一时刻有一个相对于该时刻的性能指标,同时,预测控制的优化过程不是一次离线进行,而是反复在线进行。这就要求在每一个时刻求解一个优化问题,使得新的优化是建立在实际过程的基础上,比只依靠模型的一次优化更能适应实际过程,能够有效地克服模型不精确、时变等因素的影响,具有较强的鲁棒性[2-3]。从图1 中可以看出,模型预测控制需要解决3 个关键问题:预测模型,滚动优化和参考轨迹。
2 状态空间预测模型
2.1 无人机平台模型
以t=0 时刻无人机位置为坐标原点O,Ox 指向正北,Oy 轴指向正东,Oz 轴由右手定则确定。假设无人机在水平面Oxy 内运动,其质点运动模型可表示为[5-6]:



将式(2)写成离散状态空间模型如下:


2.2 模型预测方程



由式(6)、式(7)可得总的模型预测方程:

系统输出的预测方程:

3 参考轨迹
在模型预测控制中,考虑到过程的动态特性,为了避免过程出现输入和输出的剧烈变化,往往要求过程由当前输出值沿着一条期望的、平缓的曲线达到设定值,这条曲线称为参考轨迹。参考轨迹广泛采用一阶指数变化形式[2,8]

其中,ΔT 为采样周期,Tr为参考轨迹的时间常数。
4 模型参数调整策略
4.1 避障判断
避障判断就是确定无人机的可能碰撞集合。如图2 所示,无人机与目标点的连线为PT,无人机速度方向为PP '。障碍物集合应为与PT 相交的障碍物集合和与PP '相交的障碍物集合的并集。

图2 避障判断示意图
障碍物集合:





4.2 最小避障距离
定义最小避障距离:无人机从某一位置以最大可能角速度开始逆时针(顺时针)避障,若无人机运动轨迹与障碍圆相切,则该位置与障碍物圆心的距离为逆时针(顺时针)最小避障距离。
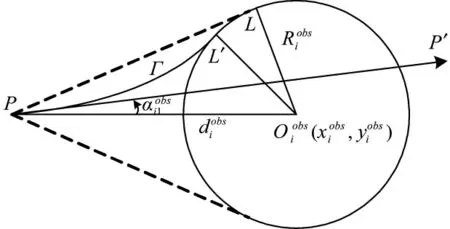
图3 最小避障距离示意图
求解算法:
4.3 参数调整
参数调整流程如图4 所示。
预测域可由式(15)、式(16)确定。

图4 模型参数调整流程图

式中,[x]取大于等于x 的整数,ΔT 为仿真步长,Nk-1为k-1 时刻的预测域长度,Nk为k 时刻的预测域长度,Nc,k为k-1 时刻的控制域长度,Nc,k为k 时刻的控制域长度。
5 滚动优化
滚动优化是模型预测控制的核心,其思想是在每一采样时刻,通过求解一个有限时域优化问题,得到系统当前时刻的最优控制序列,从而实现在整个控制时域内系统的在线闭环控制[7]。图5 给出了无人机避障问题的在线滚动优化求解流程。

图5 滚动优化流程
5.1 优化指标
优化指标取为能力-时间组合最优[9-12],则无人机避障最优控制指标可由式(17)描述:

其中

5.2 约束分析
5.2.1 控制量约束

5.2.2 避障约束

5.3 优化模型
综合式(17)~式(19)可得优化控制模型:

6 算例仿真


仿真结果如图6~图9。

图6 无人机航迹示意图

图7 无人机航向变化示意图

图8 无人机角速度变化示意图
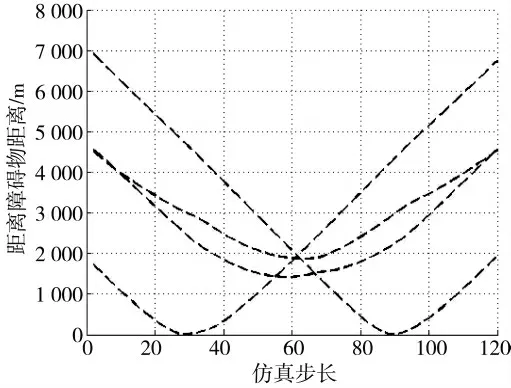
图9 无人机与障碍物距离变化示意图
7 结论
本文设计的UAV 避障路径规划,采用模型预测控制算法。通过对无人机平台进行建模分析,构造了无人机状态空间预测模型。采用一阶指数变化形式作为无人机飞行路径的参考轨迹,保证规划过程输出的稳定性。采用能力-时间组合最优为目标,建立了无人机避障路径优化模型,并采用有限时域优化的滚动优化算法,对无人机避障优化模型进行了求解。算例仿真结果表明,该算法可有效解决无人机飞行路径的避障问题。
猜你喜欢
电声技术(2022年7期)2022-09-23
花火彩版B(2020年5期)2020-09-10
科技视界(2020年24期)2020-08-26
科技视界(2020年22期)2020-08-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
当代贵州(2019年41期)2019-12-13
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
中国扶贫(2014年8期)2014-06-27
中学生数理化·八年级物理人教版(2014年2期)2014-04-02