起重机空间防撞系统设计与研究
2020-04-08 08:31彭敏林罗莉莉
中国重型装备 2020年2期
彭敏林 赵 健 罗莉莉
(中船第九设计研究院工程有限公司,上海200063)
随着现代起重运输机械产业发展,同一作业区域中起重运输机械的密度增大,导致起重运输机械之间非安全接近的概率大大增加。为了避免起重运输机械之间危险接近或碰撞的情况发生,面对不同机型应用范围和用户实际需求,出现多种防撞系统,各自原理和实施形式存在一定差异,导致防撞系统的完整性和经济性差异较大。
起重机空间防撞系统,其区别于红外线或激光之类的直线性或平面性防撞系统,通过检测这些起重机的相对空间位置和已知外形尺寸参数,建立空间函数关系,通过电气系统计算机函数运算,得出潜在的空间干涉冲突,并为驾驶员提供避让操作咨询。
现代船厂为了提高造船效率和设备高效利用,同一造船工作平台上使用不同起重机协同作业,造船门式起重机和门座起重机是最常见的起重运输机械,一般是以较大的门式起重机为主,门座起重机为辅,进行交叉运行作业。起重机空间防撞系统依照这两种起重机的外形尺寸参数和使用功能不同,系统程序自动监控各起重设备之间体型是否重叠干涉,避免相互碰撞导致不安全事故。这种空间防撞系统具备主动防撞和被动防撞功能。
1 工作原理
1.1 防撞系统组成
防撞系统由硬件和软件组成,硬件主要包含检测编码器、计算机和无线通讯设备。软件主要有电气控制系统和空间运算程序。
1.2 空间防撞系统特点
起重机空间防撞系统,不仅适用于新建的起重机,也适用于局部改造的起重运输设备。区别于以前的起重机之间面域防撞系统和线性防撞系统,空间防撞系统是空间立体性,两关联起重机可以空间交叉作业,只要两关联起重机没有空间干涉,门座起重机可以在臂架大幅度低位时在门式起重机下作业,如图1所示。

图1 起重机干涉碰撞示意图
1.3 防撞系统原理
门式起重机和门座起重机在同一船坞平台上工作,两台起重机都安装空间防撞系统,起重机之间通过无线通讯设备建立数据信息联系,通过起重机相互交换位置形态数据,检测、跟踪和运算出邻近立体空间区域,根据接近程度,向各自司机和系统提供警告和推荐避让措施。
防撞系统程序利用起重机电气控制系统的编码器检测起重机的位置和工作状态,再通过防撞系统程序运算空间坐标矢量值,得到每台起重机的空间外形尺寸参数,系统程序自动监控各台起重设备之间实时体型参数是否重叠干涉,判定起重机是否可能相互碰撞。电气控制系统根据作业工况及使用功能,设定这两台起重机的外形尺寸参数相互干涉重叠的预警范围,到达预警值时,可提供防撞警示。
为了统一各台起重机之间检测数据,采用统一的空间坐标系,设定的绝对坐标如图2所示。
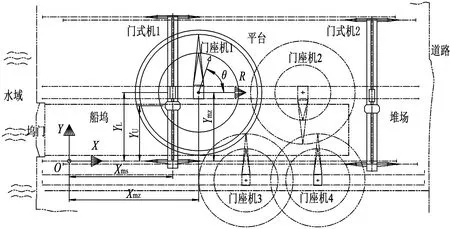
图2 起重机位置坐标图

表1 门式起重机需采集的基本数据列表

表2 门座起重机需采集的基本数据列表
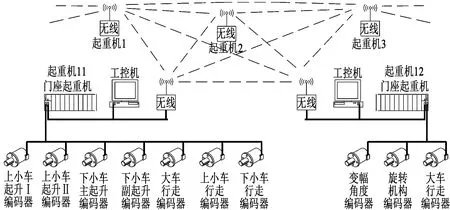
图3 起重机检测通讯示意图

图4 门座起重机比价参数示图
Figure 4 Parameters of gantry crane beam
检测坐标如下:
X为平行轨道方向,以极限为0起点;Y为垂直轨道方向,一侧轨道为0起点;Z为相对地面高度。
统一空间坐标系后,按照图3基本控制原理,通过检测元件检测各台起重机的运行数据,防撞系统需要采集的基本数据如表1和表2。
1.4 系统集成
按照图3所示的系统原理,门式起重机和门座起重机均需增加通讯模块,建立相互之间通讯。对于起重机控制系统共性和差异,多数情况建议采用无线通讯系统,并且均连接各自的控制系统总线。对于新建的起重机,防撞系统的数据测量装置可集成到系统中,对于改造的起重设备,可在原有控制系统中加装有防撞系统的数据测量装置、通讯设备和控制程序模块。
防撞系统是及时防撞警示操控运行情况系统,每台起重机的司机室和显要位置都增设报警装置,提供声光报警或语音报警,报警装置能有效警示操作人员和其它相关人员,并在控制系统的监视器上能突出显示碰撞信息。
空间防撞系统能做到全空间和全时域防撞。防撞系统是每台起重机设置有检测装置,同时还需计算程序,由电气控制程序计算出相互之间的空间位置关系。空间防撞系统在其中一台起重机停机或短时间停机时,其它起重机也能有效避免与之干涉碰撞,这样就要求系统有数据储存功能。空间防撞系统还可以对起重机群都停机之后,仅对某台起重机启动运作,能有效避免与其它起重机干涉碰撞,这就要求系统有位置储存和复位功能。
2 设计分析
2.1 基本参数检测
按照防撞系统要求,参照图1可推测门式起重机和门座起重机之间可能发生的基本碰撞有:臂架与主梁空间干涉;臂架与上小车吊钩钢丝绳空间干涉;臂架与下小车吊钩钢丝绳空间干涉。
空间防撞系统要进行空间矢量运算,除需要检测表1和表2所示的基本数据外,还需储备门式起重机的主梁外形尺寸参数和小车吊钩钢丝绳外围尺寸参数以及门座起重机的臂架外形尺寸参数。
门式起重机主要外形尺寸参数有:主梁宽度w;主梁底高h;上小车主梁方向宽度wu;下小车主梁长度方向s。
门座起重机臂架外形尺寸参数如图4所示:臂架下铰点距旋转中心Dx;臂架下铰点距地面高Dz;臂架下铰点距臂架上部主起身滑轮中心距L;臂架下铰点距臂架顶点T;臂架下铰点到起身滑轮与下铰点距臂架顶点的夹角相位差γ;起重机最大工作幅度Rmax;起重机最小工作幅度Rmin。
2.2 空间坐标参数
根据上述测得的空间防撞系统数据,结合已知的体形尺寸进行空间矢量运算,门式起重机的空间坐标参数为:

主梁Y坐标范围:(0,S)
主梁Z坐标范围:(HL,∞)

上小车Y坐标范围:Y上
上小车Z坐标范围:(Z上,∞)
下小车X坐标范围:(Xms-hc,Xms+hc)
下小车Y坐标范围:Y下
下小车Z坐标范围:(Z下,∞)
门座起重机的空间坐标参数:
臂架顶点坐标:
XT=Xmz+Dcosθ+Tcos[arccos(RL)-γ]cosθ
YT=67+Dsinθ+Tcos[arccos(RL)-γ]sinθ
ZT=41+Tsin[arccos(RL)-γ]
2.3 干涉计算判定
起重机防撞系统要求先判断门座起重机和门式起重机的轨道方向坐标X的初判值X0:
ΔX0=Xms-Xmz
如果ΔX0>0,则门座起重机在门式起重机左侧;如果ΔX0<0,则门座起重机在门式起重机右侧。
臂架与主梁干涉判定主要是臂架顶点和主梁X坐标计算和Z坐标计算:
ΔX1=XT-Xa;
ΔX2=XT+Xa;
ΔZ=YT-HL
臂架与上小车:
ΔX=41+Tsin[arccos(RL)-γ]
臂架与下小车:
ΔX=Dz+Tsin[arccos(RL)-γ]
防撞系统对于防撞安全范围设定或减速防转距离,可适当增加缓冲区域,主梁与臂架缓冲距离为hl,为了安全,设定hl=5 m,小车与臂架缓冲距离hc,为了安全,设定hc=5 m。调试过程中可设定这两台起重机的外形尺寸参数相互干涉重叠的预警范围到达最佳预警范围值,这样即可安全生产又可发挥起重机协同作业能力,实现最佳综合经济效益。
3 停机防撞设计
空间防撞系统不仅能对运作中的起重机实现空间防撞,也可以对其中一台起重机停机或短时间停机时实现空间防撞。其中一台起重机停机后其它起重机记录其最后的位置数据,在没有进一步数据更新的情况下,以最近的数据计算分析,避免与之干涉碰撞。同理,可以对起重机群都停机之后,仅某台起重机启动运作,能有效避免与其它起重机干涉碰撞。
如门座起重机停机,电控系统断电,门式起重机的防撞系统记录门座起重机停机状态参数,臂架仰起处于小幅度位置,臂架顶点高于主梁下底面。运行门式起重机靠近门座起重机,空间防撞系统可以即时检测门式起重机主梁与臂架的干涉碰撞,并分析小车与臂架的干涉碰撞。如门式起重机停机,电控系统断电,防撞系统检测门座起重机的停机状态参数,门式起重机停机,上下小车设定位置,小车吊钩均下降到设定高度。运行门座起重机靠近门式起重机,防撞系统能即时检测运算分析停机防撞可能性。
4 结论
空间防撞系统通过建立统一坐标系,空间函数运算,计算得出潜在的空间干涉冲突,并提供避让操作提示。空间防撞系统不仅实用于两台起重机之间的相互防碰撞,还可应用拓展到多台多类型起重机之间的防碰撞。
防撞系统依靠相互之间位置数据交换和储存,具备主动防撞和被动防撞功能,起重机在停机状态下也可以有效起到防撞功能。
猜你喜欢
中国设备工程(2022年20期)2022-11-02
装备制造技术(2022年2期)2022-06-04
现代仪器与医疗(2021年4期)2021-11-05
汽车工程师(2018年1期)2018-07-13
东方教育(2017年17期)2017-10-31
专用汽车(2016年7期)2016-11-23
中国高新技术企业(2016年4期)2016-11-19
汽车维护与修理(2016年3期)2016-02-28
火控雷达技术(2016年2期)2016-02-06
民用飞机设计与研究(2015年3期)2015-12-07