新型阶梯式浅吃水单立柱浮式风机平台水动力分析
2020-04-21 00:57李懿蛟
海洋工程装备与技术 2020年1期
李懿蛟
(上海交通大学 海洋工程国家重点实验室,上海 200240)
0 引 言
近年来,由于化石能源的逐渐消耗和全球气候的恶化,因此大力发展可再生能源已成为世界各国的普遍共识。海洋中的波浪能、潮汐能和风能在现阶段的开发中备受瞩目,其中风能的利用是最为成熟的。在过去的几十年中,浮式风力发电机在学术界和工业界都引起了越来越广泛的关注[1-2],相关技术得到了迅速的发展,提出了多种不同浮式平台的概念,并且已经在世界范围内开展了几个示范项目。其中首批制造生产具有浮式风机平台的包括Hywind[3]、 WindFloat[4]、 Fukushima[5],这些浮式风机正在不断完善商业运营的体系。2017年10月,第一个海上浮式风电场Hywind Scotland并网发电,这进一步推动了浮式风机的研究。可以预见,浮式风机在不久的将来将会获得更多的关注和快速发展。
现有的浮式风机平台概念主要为深水海域设计。但由于电力传输在水深50~100米的中近海海域很方便,因此中近海海域被认为是风能利用最经济有利的地区,同时,该海域的风速比位于深海的风电场的平均风速高出90%[6]。因此,全球风能开发已经逐渐转移到中近海地区[7]。这种矛盾促使研究适用于中近海海域的浮式风机平台显得尤为重要。单立柱(Spar)、半潜式平台和张力腿平台是浮式平台常用的概念。在这些概念中,Spar浮式风机平台相对具有优势,因为它设计简单,重心低,水动力性能好,易于建造且适合商业化生产。
在中近海海域中,Spar浮式风机平台应克服如下几个挑战。第一,海床和平台底部之间较短的距离限制了结构可设计的范围。近年来,通过巧妙的设计可以减小平台的吃水,中近海水域中浅吃水Spar浮式风机平台的可行性得到Karimirad、 Moan[8,9]和WEN[10]等人的广泛验证。第二,保证浮式风机系统的稳定性。与传统的固定式风机平台相比,浮式风机平台的特点是空气动力学的不稳定性更加显著,因此在设计中需要引起更多关注。在先前的研究中,已经进行了广泛的数值模拟,以研究平台振动对空气动力响应的影响[11-13]和Spar基础的浮式风机动态响应[14-16]。为了保持功率输出的数量和质量,浅吃水Spar浮式风机平台应具备良好的水动力响应。由于中近海海域传统固定式风机平台的安装很不经济,因此海上风力市场需要新的解决和改进方案,以使浮式风机更具成本竞争力。尽管这还远远不是一个成熟的市场,但是已经设计了一些概念,例如,由Madjiad Karimirad[6]设计、建造和安装的80 m吃水的浅吃水平台。
为了将浮式风机应用到中近海海域,本文研究了一种新型的浅吃水浮式风机平台。灵感来自经典Spar平台Hywind,其出色的动态响应已通过数值和实验测试得到了广泛验证。但是,SJTU(上海交通大学)设计的Stepped Short Spar for Shallow(SJTU-S4)大大降低了平台吃水深度(目标吃水为50 m)。虽然该结构看起来像基于重力的结构,却可以像Spar一样工作。这使得风力发电机和平台的组装能够在船厂中实施,无需额外的辅助设备来提供海上安装的稳定性。通过避免使用昂贵的海上起重机、重型起重机或辅助船队来节省成本。
基于三维势流理论,使用商用软件(HydroD)在频域上对SJTU-S4进行基础水动力分析。在浮式风机工作条件下,利用OrcaFlex对SJTU-S4进行时域模拟,以验证系泊系统是否足够安全。在SKLOE进行设计的缩尺比为1∶50的模型试验。在试验风场中,对NREL 5MW风力发电机和SJTU-S4进行规则波和不规则波的试验。数值仿真和试验结果表明,所开发的SJTU-S4在中近海海域中可以提供良好的水动力性能。
1 SJTU-S4浮式平台设计
1.1 SJTU-S4基本结构设计
浮式风机在中近海海域逐渐得到了广泛重视并获得了加大力度的发展,在水深超过50 m的海域中,固定式风力发电机通常认为是不经济的。适用于中近海海域的浮式风机平台SJTU-S4是一种针对目标作业水深100 m,由悬链线式系泊系统定位,自身吃水为50 m的单立柱式浮式平台。浮式风机平台的设计主要考虑其固有频率要避开海洋波浪的周期频率和风机运行固有频率1P、3P,以免发生共振现象,造成风机系统的损坏。同时,以纵摇角度不超过10°为标准[17],保证平台运动姿态使得风机发电效率在有效范围内。考虑到Spar运动性能良好,制造简便等优点,以Hywind为基础,改用阶梯式外形,由从水平面向下三个尺寸依次增大的圆柱组成。由于目标吃水较浅,因此通过增加平台的重量来提高其稳性是一种必然趋势,而后调整其重心及浮心,计算其周期,达到避开海洋波浪周期的目的。SJTU-S4排水体积为17 938.035 m3,浮心位置为-31.286 m,重心位置为-34.925 m,定倾中心位置为0 m(由于平台在小倾角下出入水体积对称)。平台基本结构尺寸如图1所示,平台具体参数如表1所示,以静水面为参考原点,竖直向上为正。

图1 SJTU-S4平台基本结构尺寸Fig.1 Basic structure size of SJTU-S4 platform

表1 SJTU-S4平台参数,λ=50
1.2 SJTU-S4系泊系统设计
该系泊系统由三根相同材质的钢缆组成,试验中用不锈钢配重制成。系泊缆1沿波浪方向,从系泊缆到锚点为正方向。系泊缆2和缆3成120°夹角对称布置。系泊半径为500 m,缆长为520 m。如图2所示。

图2 系泊缆布置图Fig.2 Mooring lines layout
作为悬链式系泊系统,在距水平面以下6 m处的D2=16 m的圆周上布置锚点,这种在平台较高位置布置锚点[9]的方法,有效地减小了风倾力臂,使得平台的运动有更好的响应,较远位置的锚点可以通过较长的躺底段的锚链提供更大的恢复力。系泊系统的具体参数如表2所示。

表2 系泊系统的具体参数
在Hs=7.0 m,Tp=11.0 s,γ=2.2,流速1.0 m/s的波浪和流载荷的作用下时,缆1和缆2的应力最大值分别为2 460.17 kN和909.46 kN,其系泊系统应力大小可以满足强度要求。针对系泊系统可以进行进一步的研究优化。
2 SJTU-S4水动力性能
为客观评估分析SJTU-S4的水动力性能,基于Sesam和OrcaFlex进行了系统的频域和时域仿真分析,此仿真结果为平台设计缩比试验以验证其水动力性能。
2.1 势流理论
三维势流理论是研究Spar水动力性能的主要方法之一,也是用Sesam计算海洋结构物水动力的理论基础。三维势流理论可用于计算速度为零的大型浮式结构物的一阶波浪载荷。当入射波与大型结构物相互作用时,波场的速度势可分解为三个部分: 浮体的入射势、辐射势和绕射势(由连接到海底的系泊缆的弹性连接产生)。假设海洋结构物附近的流体是理想的流体,即无旋、无黏和有势,则可以将流场中的速度势问题简化为具有相应流体边界条件的拉普拉斯方程:

(1)
海洋工程中采用数值方法来计算非规则结构物的流场,通常使用边界元方法来计算规则波中大型结构物的线性波频率响应。具体的计算过程如下: ①将结构物的湿表面分成若干个网格,以形成许多表面元素;②通过结合拉普拉斯方程和辐射势与绕射势的边界条件求解表面源的强度;③对沿湿表面网格的面源强度进行积分,分别计算出辐射势和绕射势,从而确定流场中的速度势。
2.2 水动力计算
基于三维势流理论,在Sesam下研究SJTU-S4的水动力性能。主要研究该平台在不同频率波浪作用下产生的不同响应情况。因此在频域分析中仅考虑波浪载荷。计算得到SJUT-S4的附加质量和阻尼如图3所示。
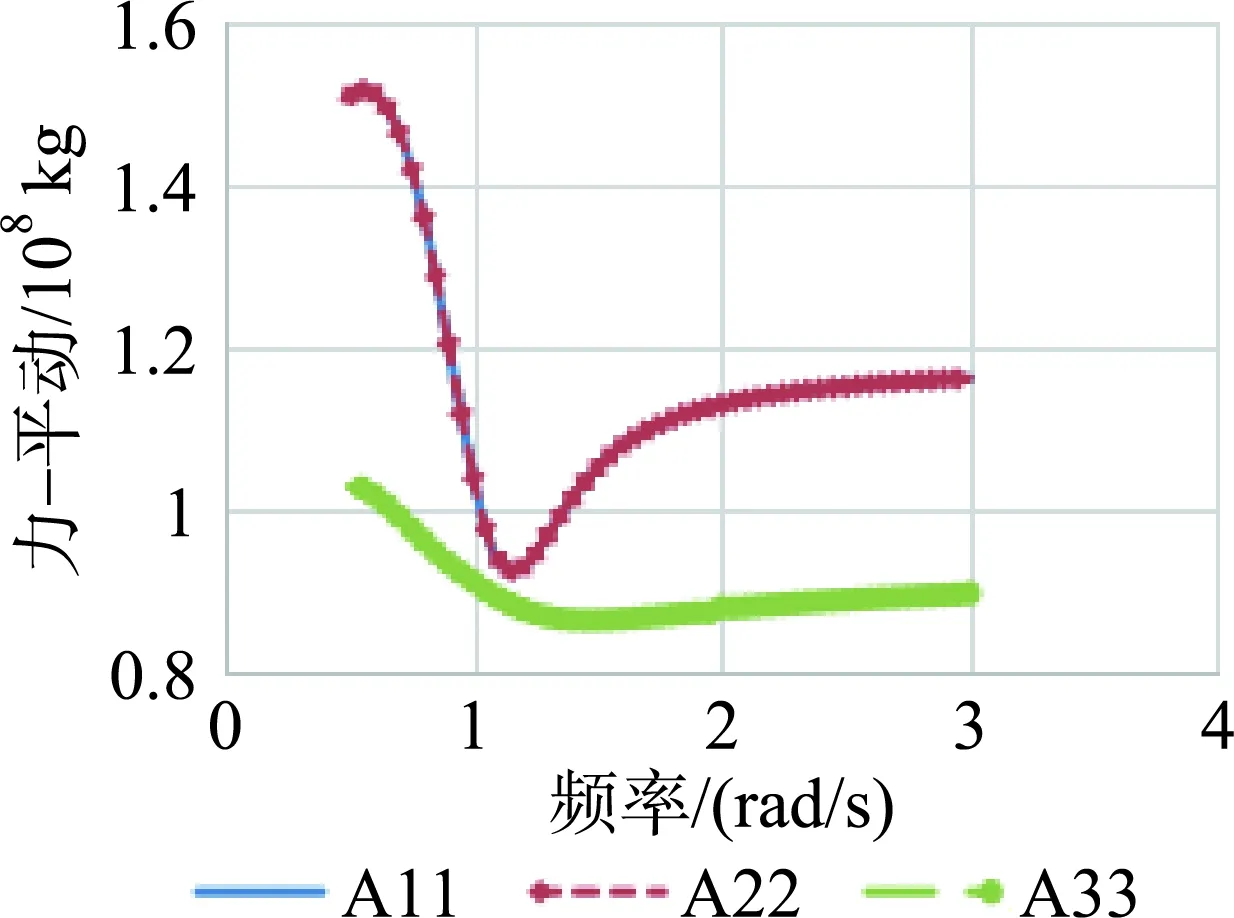
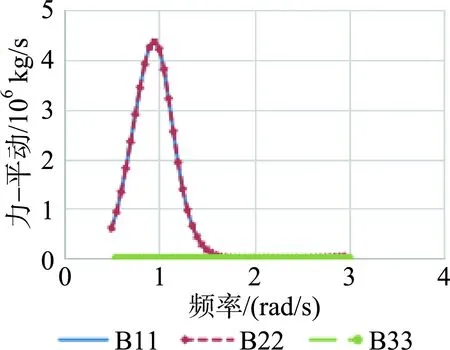
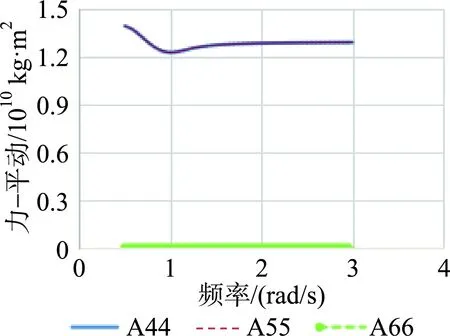



图3 SJTU-S4水动力附加质量和阻尼
6种刚体运动的水动力附加质量矩阵和阻尼矩阵都是振荡频率的函数,如图3所示。在结构物没有速度的情况下,因为其水动力附加质量矩阵和阻尼矩阵是对称矩阵,所以只给出了上三角矩阵元。此外,由于Spar平台的对称性,因此附加质量矩阵中纵荡-纵荡分量(A11)和横荡-横荡分量(A22)相等,横摇-横摇分量(A44)和纵摇-纵摇分量(A55)相等。同样地,阻尼系数矩阵中的纵荡-纵荡分量(B11)和横荡-横荡分量(B22)相等,横摇-横摇分量(B44)与纵摇-纵摇(B55)相等,其他未显示的矩阵元素为零。
3 SJTU-S4性能试验验证
3.1 水池模型试验系统简介
经过水动力频域计算和在OrcaFlex中加入系泊系统的时域计算,为进一步验证SJTU-S4的运动性能,设计缩尺比λ=50的缩比模型试验,并在上海交通大学海洋工程国家重点实验室(SKLOE)进行。整个系统包括S4模型平台(SJTU-S4)、风力发电机模型、造风系统、造波机(wave generator)。通过造波机,产生指定参数的规则波或不规则波,同时在造风系统下,产生作用于叶片的风谱(定常风)。试验中将6分力测量仪分别安装于机舱、塔筒和平台连接处,以测量受力和弯矩。在机舱处安装加速度测量仪,测量三个方向的加速度。试验为了能准确地捕捉浮式风机模型的6自由度运动,使用实验室非接触式6自由度运动测量仪,它可以精确地测量船舶及海洋工程结构物在风浪流作用下的6自由度运动。试验系统在SKLDE中的布置如图4所示。
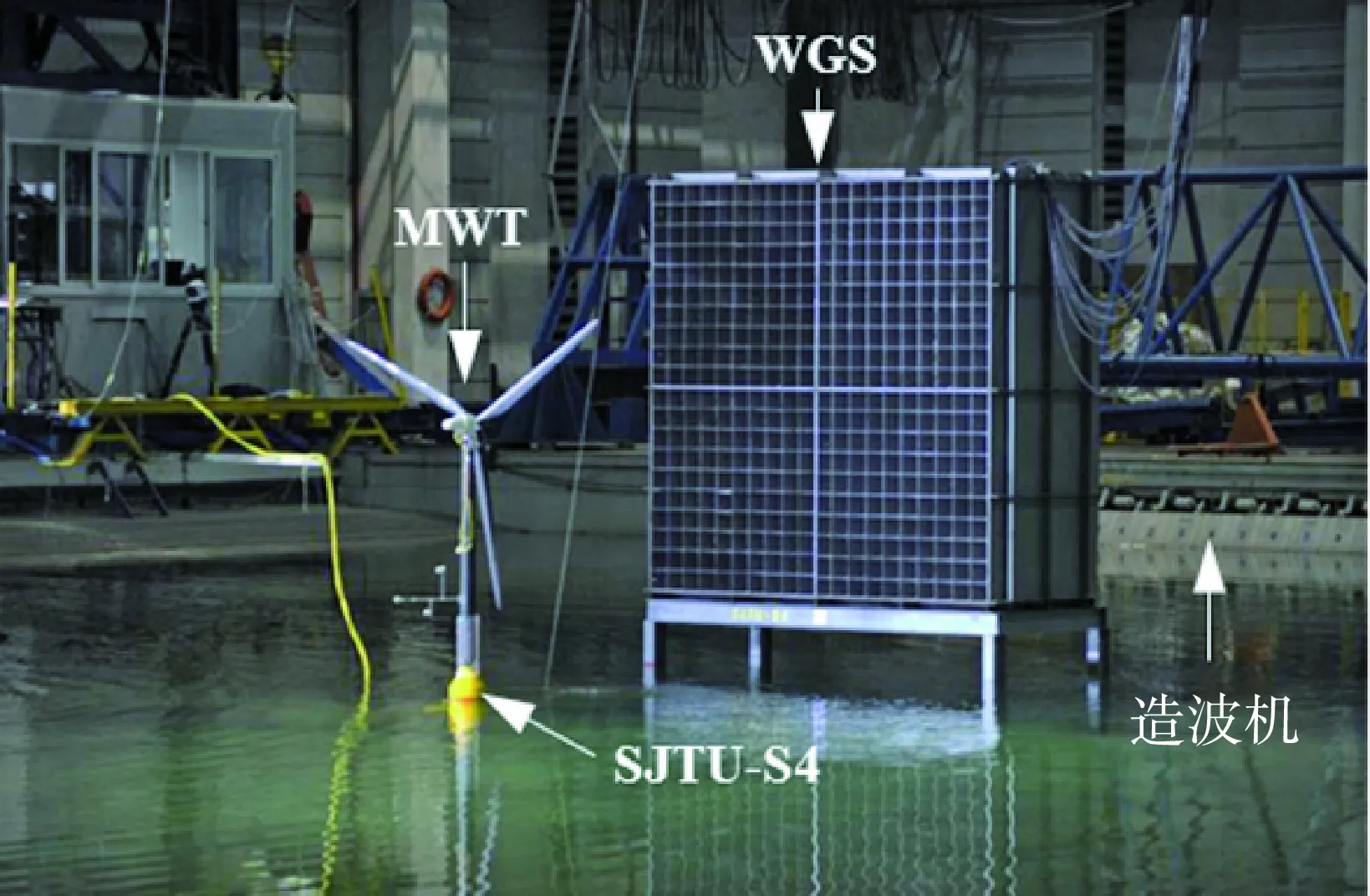

图4 试验系统在SKLOE中的布置Fig.4 Arrangement of test system in SKLOE
将平台和缩尺比例为50∶1的NREL 5MW风机耦合进行规则波和不规则波试验。试验关注的主要参数有平台6自由度运动、加速度、风机转矩、锚链拉力等参数,并以此为判断平台性能的依据。该模型材料为木质,外层涂有玻璃钢材料,锚链由不锈钢配重制成,试验水池尺寸为(长×宽)50 m×30 m,试验水深为2 m,模型布置于水池中心处。
3.2 自由衰减试验
平台的衰减周期与其质量属性有关。为了验证模型的可靠性,数值仿真和水池试验分别进行了衰减试验,其结果如表3所示。

表3 数值仿真和水池试验的衰减周期对比
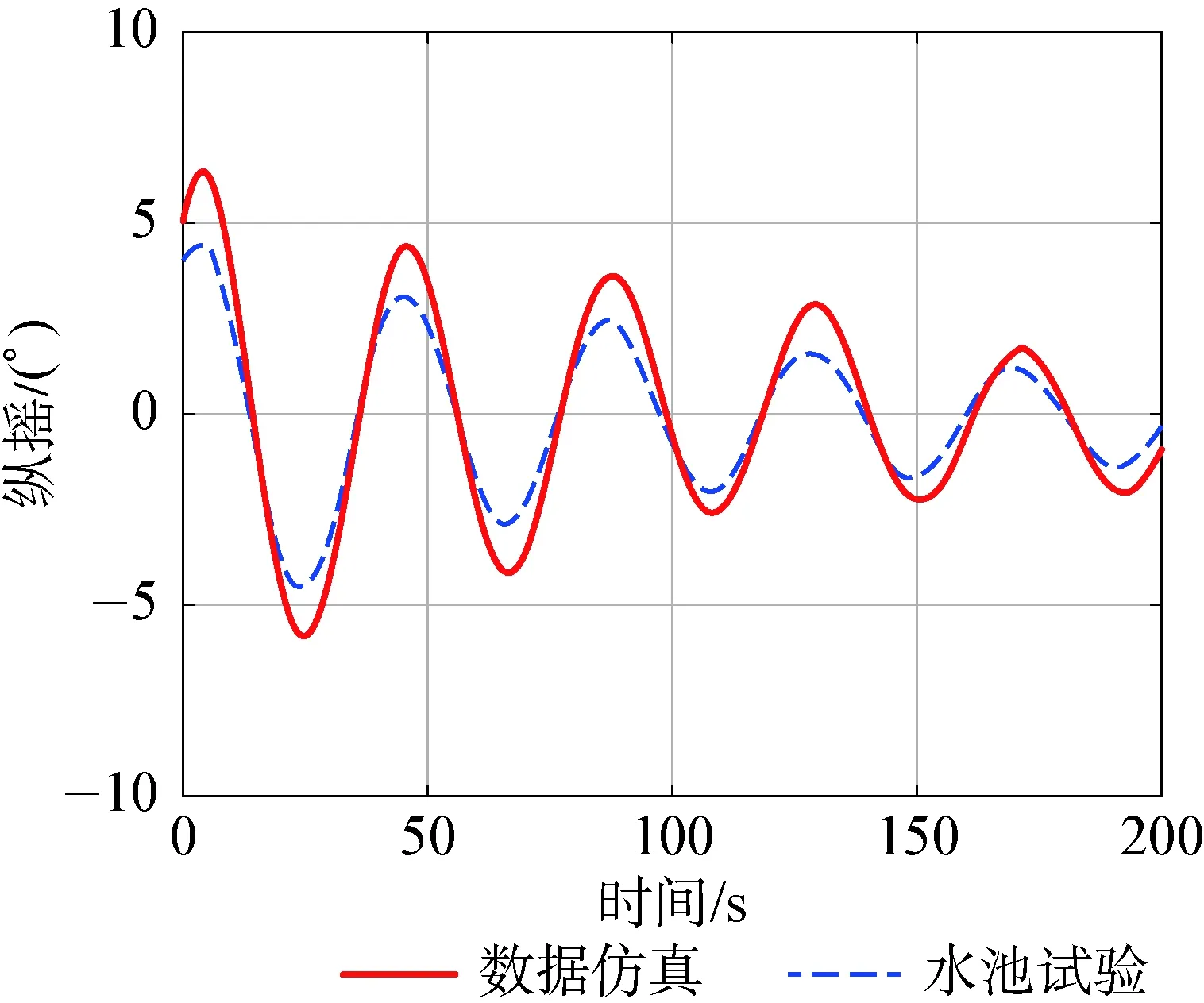
图5 数值仿真和水池试验纵摇衰减对比Fig.5 Numerical simulation and tank test about Pitch decay comparison
从表3可知,水池试验和针对数值仿真的衰减试验两者得到的6自由度的衰减周期结果基本一致,相对误差小于10%。从图5中可以看出,两者的纵摇衰减曲线也基本趋于一致。
3.3 系泊系统校验
系泊缆的刚度曲线反映了系泊系统的恢复能力。水池试验中试验模型被牵引至固定位置,记录系泊缆拉力数值。图6显示了系泊缆刚度曲线计算结果的比较。

图6 系泊系统的刚度曲线比较Fig.6 Comparison of stiffness curves of mooring systems
取x正向10 m到x负向10 m测得的刚度曲线,数值仿真同试验结果基本趋于吻合,证明该系泊系统达到了本文的设计要求。
3.4 不规则波作用下运动响应
为了更准确地刻画该平台的运动能力,在OrcaFlex中,对该浮式风机系统进行各种海况的时历仿真,分析要求进行3小时的模拟以充分模拟环境条件作用下系泊系统的响应情况[19]。同样,在水池缩比试验中,进行相当于实尺度3小时的时历试验,记录浮式风机系统所受系泊缆拉力和自身6自由度运动。本文在多种海况中选取浮式风机工作状态下海洋环境最为恶劣的一组数据进行分析。选取有义波高Hs=7.0 m,谱峰周期Tp=11.0 s, 谱型参数γ=2.2,流速1.0 m/s的海洋环境情况和31.1 m/s风速(定常风)下进行的模型试验结果。波浪谱如图7所示,试验统计值如表4和表5所示。
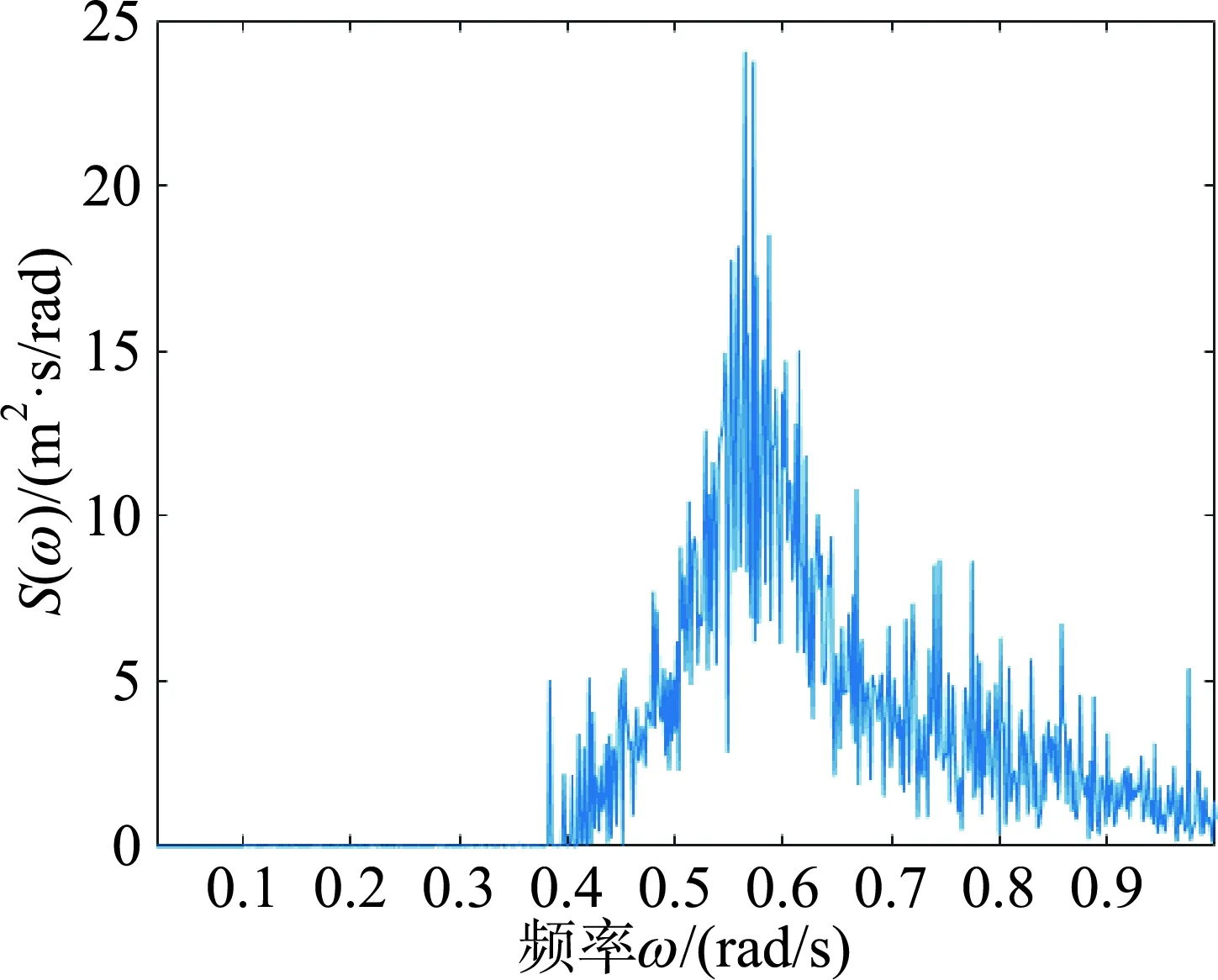
图7 Hs=7.0 m, Tp=11.0 s, γ=2.2时的试验波浪波谱Fig.7 Hs=7.0 m, Tp=11.0 s, γ=2.2 test wave spectrum

表4 纵荡、垂荡和纵摇统计值
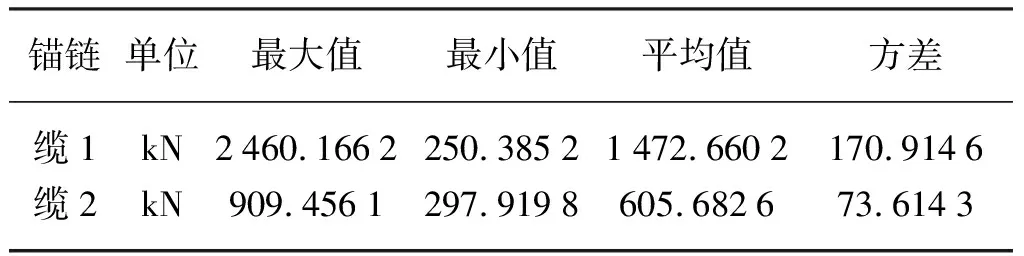
表5 锚链力统计值
结果选取生存海况下,在纵荡、 垂荡和纵摇影响风机工作的主要运动方向上的统计值,其纵荡最大位移为11.847 m,纵摇最大俯仰角度为9.862°,小于设计要求的10°,可以认为是有效的。纵摇均值在-5.9°附近是因为试验开始前,已经给予了浮式风机系统一个风场和流场的作用,从而产生一个初始角度。同理,垂荡方向的运动初始也会有一个下沉的状态,导致均值在-0.089 m附近,最大运动幅值为1.205 m。系泊缆的张力在最值和均值上都可满足强度要求,由于缆1为迎浪缆,因此其应力波动较缆2较大,试验结果在一定程度上反映了SJTU-S4运动时的真实情况。
通过水池试验,得到的时历统计值结果经过分析,在工作海况下能保持其纵摇运动的最值小于10°,在可接受范围内,说明其水动力性能良好,可以满足浮式风机的工作需要。
4 结 语
基于浮式平台在中近海海域可供风力发电机工作这一原则,设计SJTU-S4和其系泊系统,对SJTU-S4执行了参数化设计。该概念在保持经典Spar优秀的耐波性下,设计包括形式、浮心、重心设计,导缆孔位置,锚链布置和平台尺寸等参数,使其运动响应能满足设计条件。基于三维势流理论,通过Sesam的频域仿真和OrcaFlex的时域仿真,对SJTU-S4进行了数值仿真计算验证其可靠性。
为了进一步验证其可靠性,本文研究团队设计并在上海交通大学海洋工程国家重点实验室(SKLOE)进行1∶50缩比模型水池试验,对SJTU-S4在中国东部海域的动态响应进行了试验评估。在风,浪和流的共存的环境载荷下,记录了6自由度运动和系泊系统参数。
试验结果通过统计值分析,在衰减周期、系泊系统刚度、六自由度时历统计值、系泊缆拉力统计值上,较好地满足了风机工作要求的条件。其最大俯仰倾角不超过10°,很好地表明了SJTU-S4具有良好的动态响应,符合海上作业的波浪情况。
为顺应海上浮式风机发展的趋势,如本文研究的应用在浅水的浮式风机平台SJTU-S4的性能和其尺寸的参数如表1所示,它在排水量方面仍具有进一步的研究潜力。如果可以将SJTU-S4的排水量减小到一个较小的水平,它将更加经济且具有更广阔的应用前景。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
数学小灵通(1-2年级)(2020年10期)2020-11-14
建材发展导向(2019年10期)2019-08-24
振动工程学报(2019年2期)2019-05-13
新少年(2018年3期)2018-07-07
小学生导刊(低年级)(2016年11期)2016-11-14
船海工程(2015年4期)2016-01-05
船海工程(2013年6期)2013-03-11
船海工程(2013年6期)2013-03-11