基于无人机多光谱图像的土壤水分检测方法研究
2020-05-07 09:09李鑫星朱晨光傅泽田严海军彭要奇郑永军
光谱学与光谱分析 2020年4期
李鑫星,朱晨光,傅泽田,,严海军,彭要奇,郑永军*
1. 中国农业大学信息与电气工程学院食品质量与安全北京实验室,北京 100083 2. 中国农业大学水利与土木工程学院,北京 100083 3. 中国农业大学工学院,北京 100083
引 言
土壤水分含量是土壤属性关键的表征参数之一,该参数在农业、水文、环境、气象等领域起重要作用; 土壤水分含量可以反映土壤的湿润状况,其对农作物长势起关键作用。 土壤含水率在陆地表面的吸收、反射、发射的过程起中重要作用,影响地表与大气界面间的能量和物质的交换。 因此,及时准确地获取土壤水分含量的信息极为重要。
多光谱图像包含多个波长光谱信息的图像信息。 成功[1]等以湖南株洲市区中西部为例,基于多元线性回归、PLSR和BPNN回归模型,建立了土壤重金属含量的预测模型。 夏楠等[2]结合了多光谱遥感影像数据与地面土壤有机质的实测数据,建立了土壤有机质多元线性回归定量估算模型。 结果表明,运用多光谱数据对干旱区土壤有机质估算的方法是可行的。 多光谱相机灵巧便携,可搭载在无人机上,对土壤墒情进行监测。 张智韬[3]等用大疆无人机搭载Micro-MAC型多光谱相机对土样监测,采用PLSR、逐步回归法以及岭回归法,分析土样多光谱数据与土壤水分含量的相关性。 试验结果表明,土壤水分含量与其多光谱图像有一定的相关性。
基于无人机采集土壤的多光谱图像,研究土样光谱反射率与土壤水分含量间的关系,建立了基于BP神经网络、支持向量机、偏最小二乘的土壤水分含量的预测模型,并对三种模型的预测效果进行对比分析,为土壤水分含量的快速检测提供理论支持。
1 实验部分
1.1 试验数据选择
在北京市通州中国农业大学实验站采集土壤样本,该地区处于北纬39°41′59″,东经116°41′1″。 土壤沙瓤质,在冬小麦实验田取100组土壤,经过风干、筛细,配成含水率10%~50%。
1.2 仪器
研究中采用Micasense公司生产的RedEdged-M型多光谱相机,大疆创新公司生产的Phantom 3无人机,电恒温鼓风烘干箱,见图1。
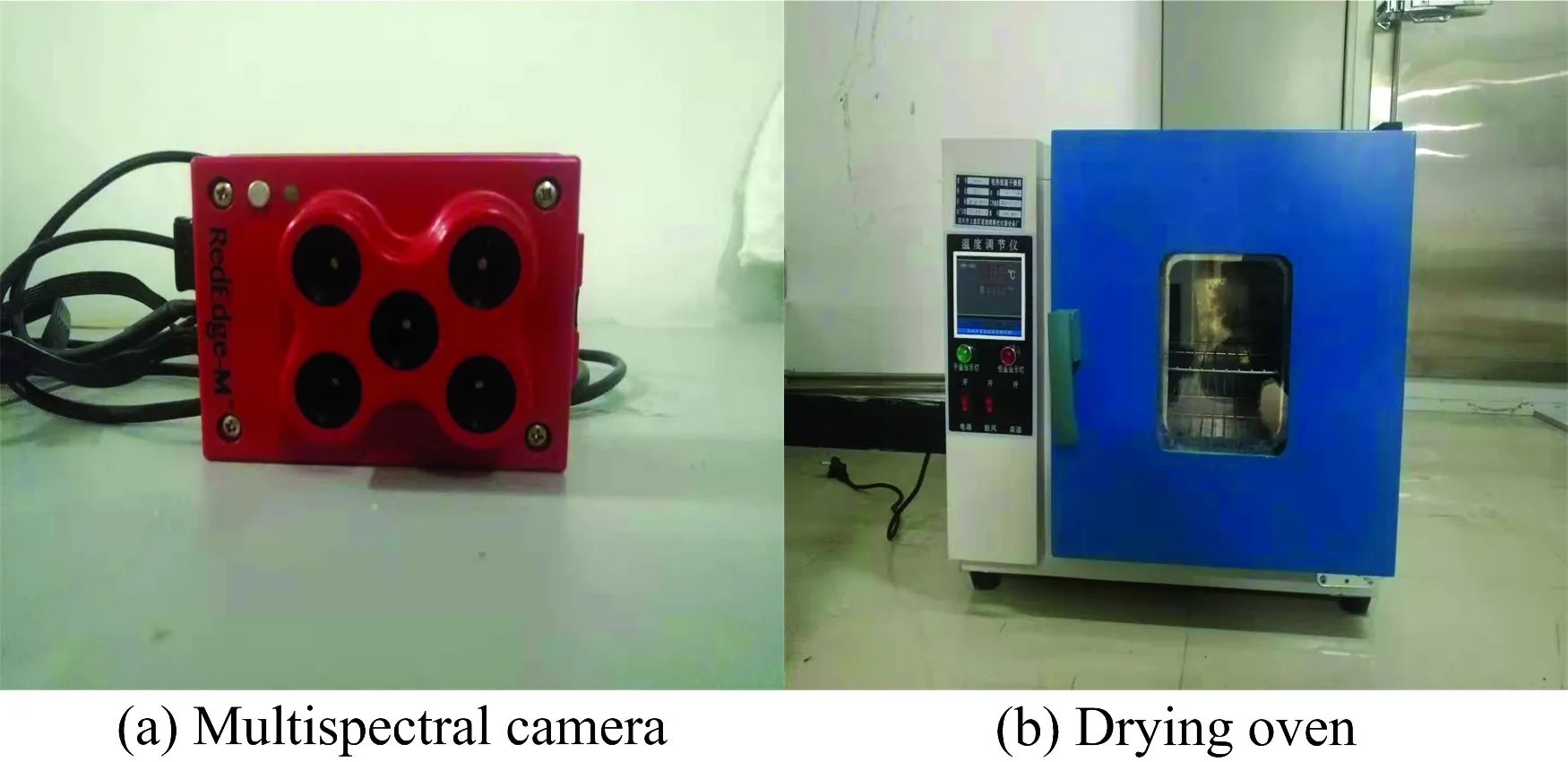
图1 实验仪器
1.3 样本数据采集
数据采集选择阳光充足的天气,于2019年1月20日14:00,在中国农业大学通州实验站的冬小麦实验田间进行。 将美国Micasense公司生产的Micasense RedEdged-M型相机搭载在大疆Phantom 3型无人机上。 采集土壤样本的光谱数据前用该型号多光谱相机的标准白板进行1~2次标定。 无人机经多次试飞后,选定飞行高度为3 m,待无人机机身稳定后进行数据采集,如图2所示。

图2 数据采集
数据采集完成后,采用土壤烘干法进行土壤含水率的计算[4]。 把100份土样分别放在10 cm×16 cm的锡纸盒中,放入烘干箱中烘干土壤样本。
(1)
式(1)中,w为含水率,m0为锡盒质量(g),m1为锡盒及样品初始质量(g),m2为锡盒及样品烘干质量(g)。
1.4 数据预处理
首先,将使用光谱数据处理ENVI5.3软件对图像进行处理,建立100盆土壤感兴趣区域(Region of Interesting, ROI)。 由于,在采集土壤的多光谱数据时,可能会受采集环境、仪器的影响导致误差,因此,根据花盆的面积、形状建立合适大小的ROI,提取出每盆土壤样本的平均光谱值。 其次,根据标准白板光谱值和亮度值,计算出每个花盆在蓝、绿、红、红边、近红外土壤波段的光谱反射率。
1.5 建模方法
BP神经网络是一种应用最广泛的多层神经网络学习方法,不断调节网络权重值,最终网络的输出值与期望值输出尽可能地接近,从而达到训练的目的。 莱文贝格-马夸特算法是针对误差平方和型函数的特定方法, 这使它在训练神经网络中测量这种误差时非常快[5]。
支持向量机(SVM)是一种常用的分类算法,支持向量机回归(SVMR)模型是支持向量机在函数回归领域的应用,该算法可解决高维度特征回归问题[6],并且该算法有大量核函数可以使用,可根据数据样本和回归问题的特点选择核函数[7]。
偏最小二乘(PLS)算法[8]适合变量数量较多,变量间有很大共线性的问题[9]。
2 结果与讨论
2.1 土壤含水率反演模型
基于莱文贝格-马夸特方法改进的BP神经网络建立土壤水分含量模型,土壤样本5个波段的反射率作为5个神经元输入,土壤含水率作为1个神经元输出[10]。 80组土壤样本训练数据中,80%的土壤样本数据用于训练模型,10%的土壤样本数据用于验证模型,10%的土壤样本数据用于测试模型。 根据5个波段的图像对应的反射率作为输入神经元,土壤含水率作为输出神经元。 求解出隐含层数在7~13之间,每个隐含层对应的网络训练10次,记录拟合精度最高的数值。 训练求解过程可知,隐含层数为10时,模型的迭代次数最少和均方差最小。 因此,选择5-10-1的莱文贝格-马夸特改进的网络结构。 效果如图3和图4所示。

图3 BPNN模型训练效果
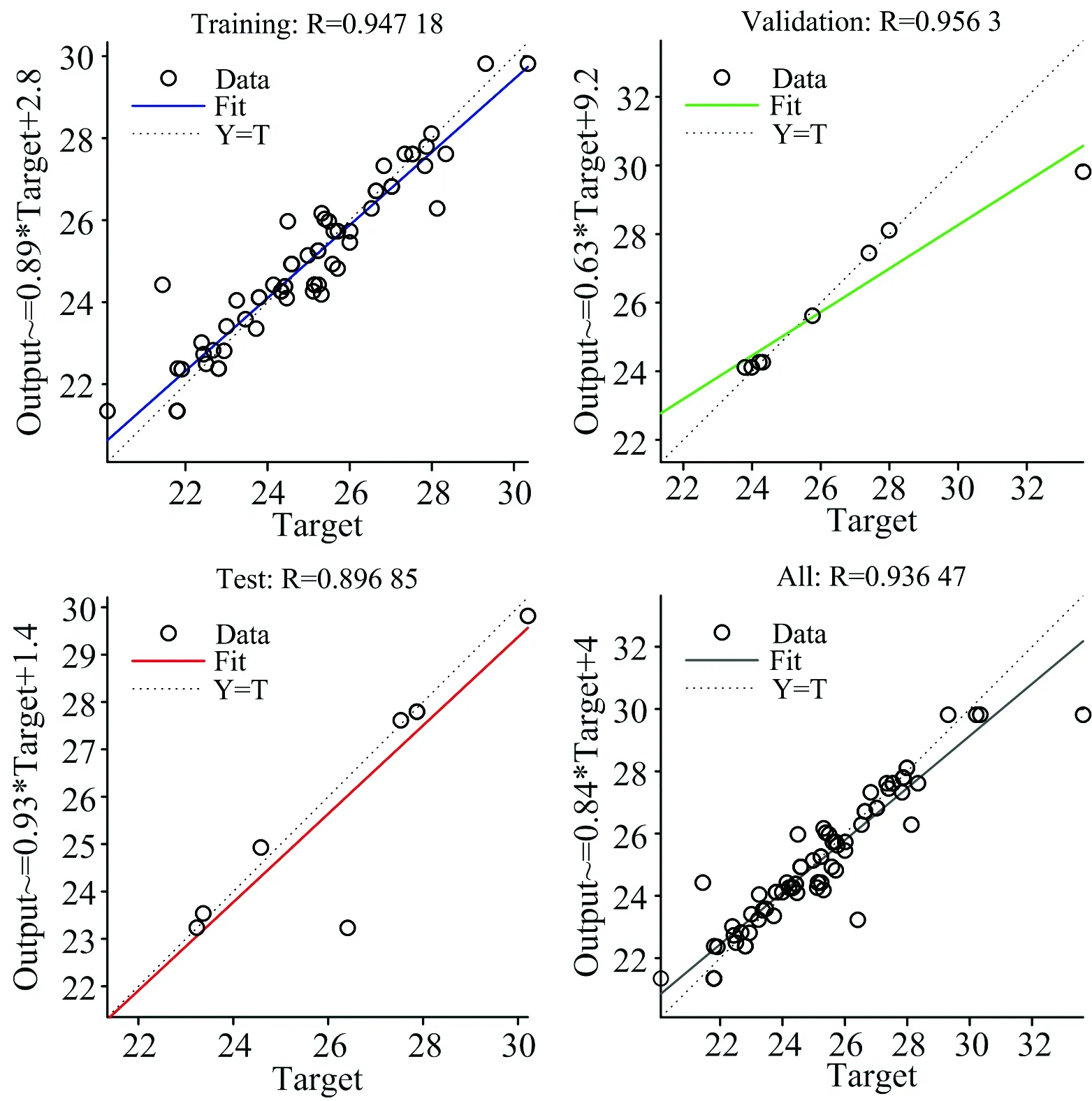
图4 BPNN模型拟合效果
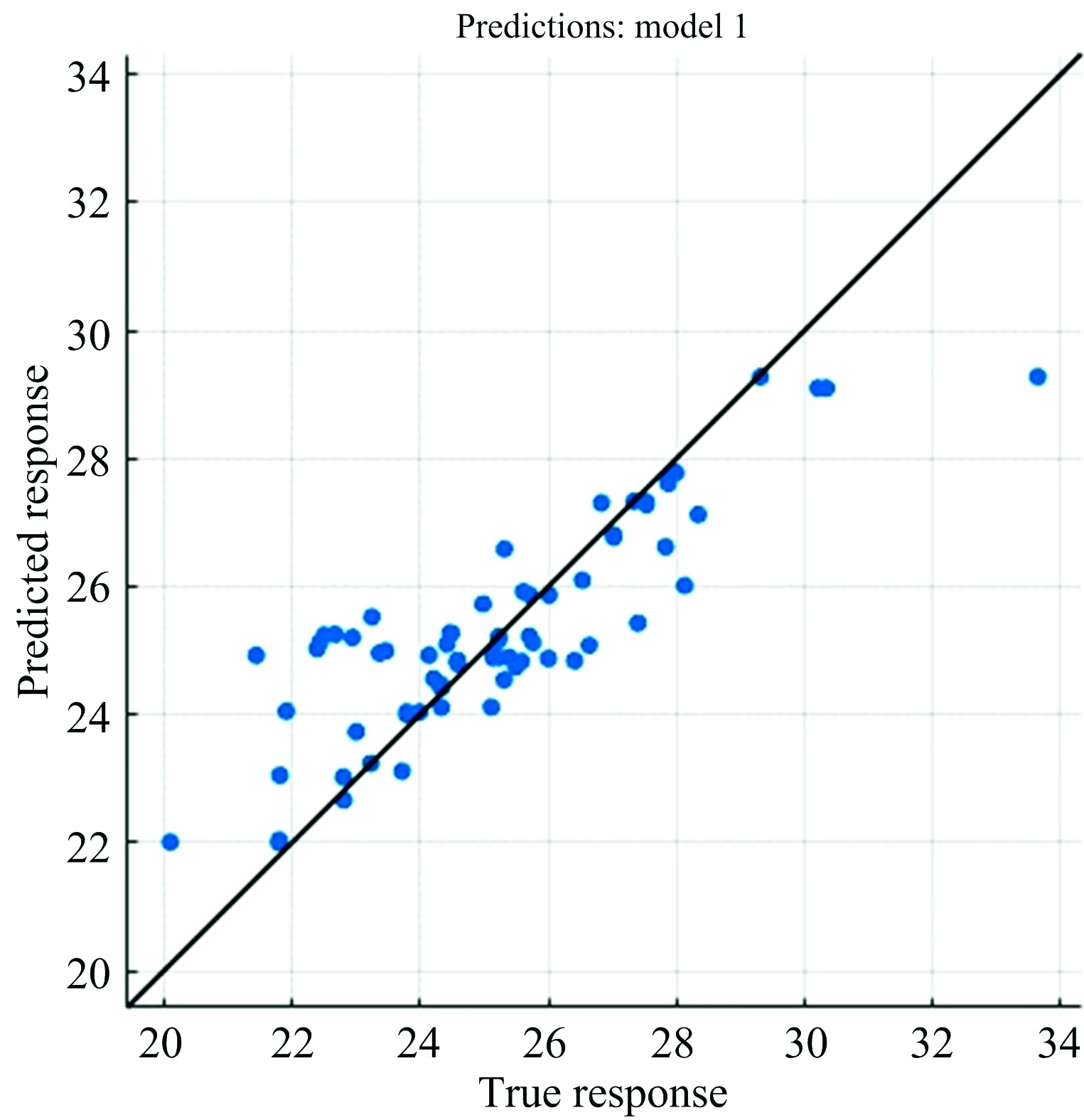
图5 支持向量机模型训练效果
将80组土壤样本在SVM模型训练,高斯核函数可以把特征映射到无限多维空间,参数较好选择[11-12]。 因此,本研究以高斯函数作为核函数做训练,当参数为0.56时,模型效果最好,模型的RMSE为1.219,R2为0.73。 模型训练效果如图5所示。
建立基于偏最小二乘的土壤水分含量预测模型[14-15],以80组土壤样本数据为训练集,偏最小二乘的模型的训练效果如图6和图7所示。
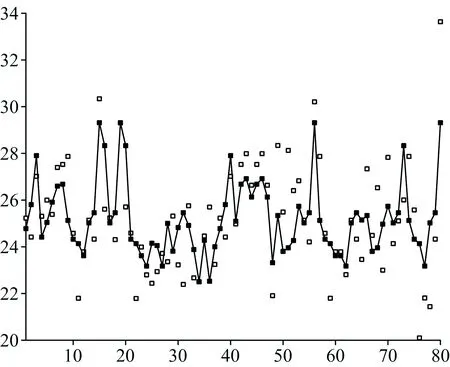
图6 偏最小二乘模型训练效果图
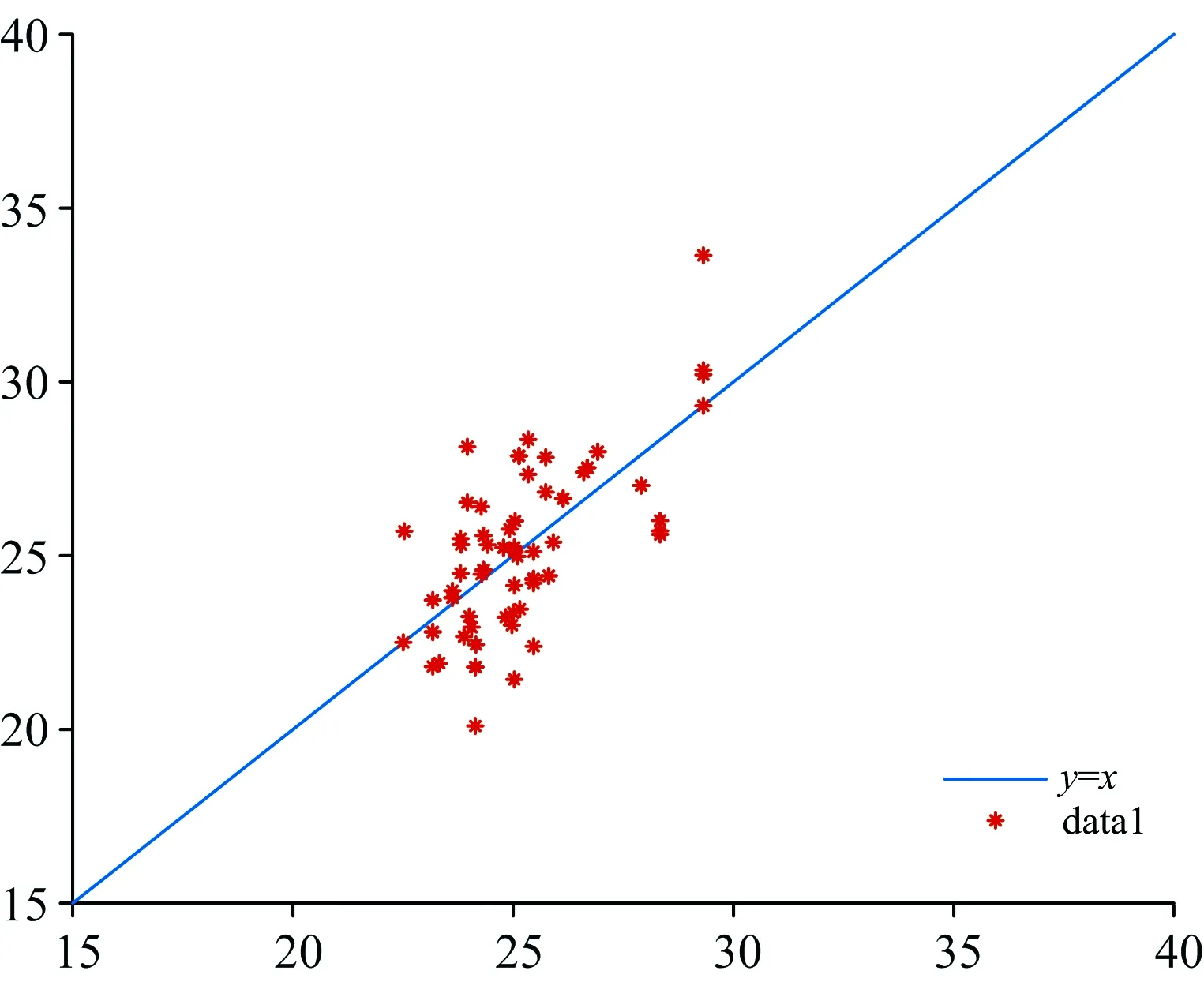
图7 偏最小二乘模型拟合效果
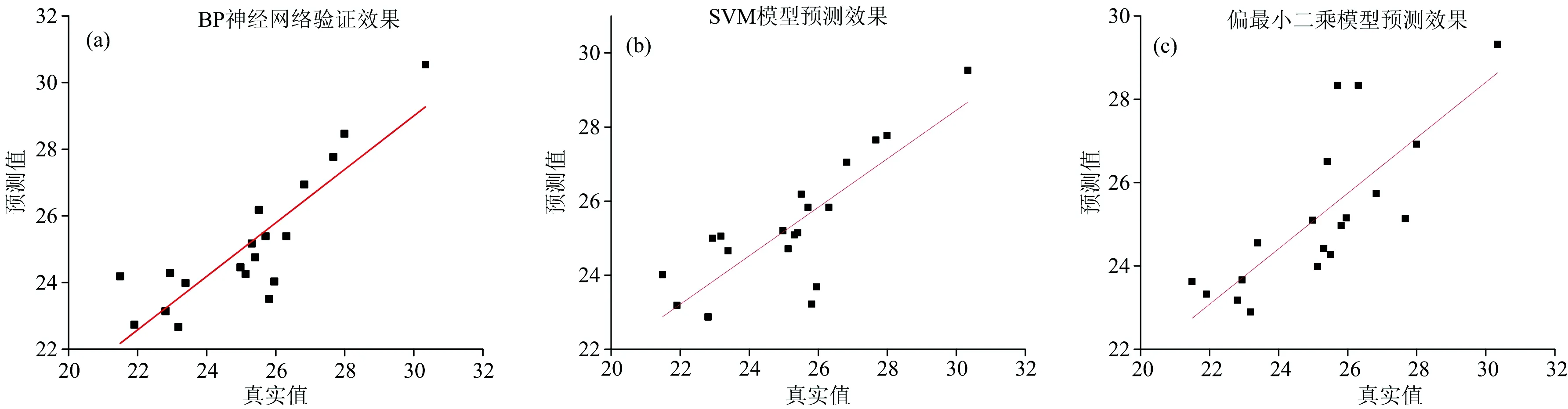
图8 三种模型验证效果
2.2 模型验证
将剩余的20组土壤样品数据进行模型精度验证。 将20组土壤样本数据中代入所建立的基于BPNN,SVM和PLS的土壤水分含量预测模型中,验证效果分别如图8(a, b, c)所示。
2.3 比较分析
通过对三种模型的预测值与烘干法的测定值对比分析,发现BP神经网络模型的效果均优于其他两种模型。 计算出该土壤样本水分含量的预测值,与理化方法所得的土壤水分含量的值进行相关性的对比分析,结果如表1所示。 其中,基于BP神经网络的土壤水分含量预测模型的R2和NRMSE分别为0.872和0.268; 基于支持向量机的土壤水分含量预测模型的R2和NRMSE分别为0.821和0.298; 基于偏最小二乘算法的土壤水分含量预测模型的R2和NRMSE分别为0.789和0.316。 由此可知,BPNN模型预测效果最精准,训练速度最快。
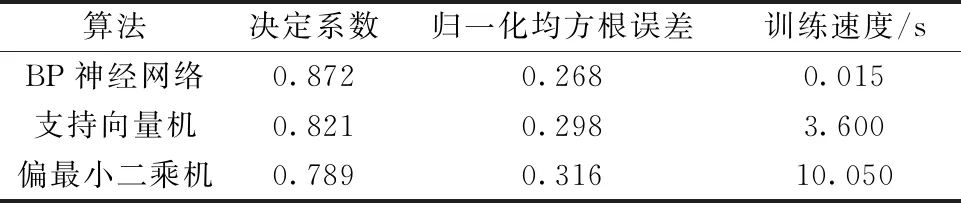
表1 三种模型效果对比
3 结 论
利用无人机采集了土壤的多光谱图像,利用数据处理软件ENVI5.3对多光谱图像进行处理,得到其光谱曲线,以标准摆白板的光谱值为参考(光谱反射率为100%),计算出土壤在5个波段的光谱反射率。 以烘干法对土壤水分含量进行理化测定,对光谱反射率和理化测定值进行建模。
分别以BPNN,SVM和PLS算法对土壤水分含量进行建模,结果发现,土壤的光谱反射率与含水率间存在较显著的相关性。 因此,基于无人机可以对土壤水分含量进行有效的监测,将多光谱技术应用在土壤水分含量检测的领域中,对监测土壤墒情提供技术支持和理论支撑。 本研究将20组预测值和真实值进行相关性分析,BP神经网络模型预测效果均较好,为采用无人机多光谱图像的土壤水分含量的预测模型研究提供方法支持。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
电力科技与环保(2022年3期)2022-07-15
农业工程学报(2022年5期)2022-06-22
林业机械与木工设备(2022年5期)2022-05-27
空间科学学报(2021年1期)2021-05-22
云南化工(2020年11期)2021-01-14
电子制作(2016年1期)2016-11-07
中国光学(2015年5期)2015-12-09
塔里木大学学报(2014年3期)2014-03-11
食品工业科技(2014年23期)2014-03-11