城轨交通全自动运行列车车辆段设计研究
2020-05-25 02:37杨子亮
现代城市轨道交通 2020年5期

摘 要:首先总结城市轨道交通全自动运行列车对车辆段设计带来的主要变化,并分析不同段型的车辆段总平面布置的设计特点与注意事项;然后研究车辆段停车列检库、转换轨、洗车库的主要设计参数变化,并给出设计建议;最后分析全自动运行列车对车辆段设计带来的其他影响。此研究结论和建议可为车辆段总平面设计和工艺设计提供参考和依据。
关键词:城市轨道交通;全自动运行列车;车辆段;设计研究
中图分类号:U231.1
全自动运行列车是一种基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通列车。而车辆基地是保证城市轨道交通正常运行的后勤保障场所,包括车辆段、综合维修中心、物资总库和其他辅助生产的配套设施。城市轨道交通工程采用全自动运行系统后,车辆段的设计原则、设计理念将发生较大的变化。
1 车辆段的主要变化
1.1 场段驾驶区划分
为满足列车在段内部分区域全自动驾驶的需求,需根据作业需求将车辆段划分为自动驾驶区和人工驾驶区。运营控制中心(OCC)对列车的运营控制权由车站延伸至车辆段的自动驾驶区。
自动驾驶区包含出入段线、停车列检线、洗车线;周月(双周/三月)检线根据工艺布局,既可位于自动驾驶区也可位于人工驾驶区;牵出线(转换轨)、试车线应按自动驾驶区进行防护,但也具有人工驾驶的工况;吹扫线、静调线、定修线、临修线、调机停放线、镟轮线、大架修线等线路位于人工驾驶区。自动驾驶区和人工驾驶区应连续相邻设置,不宜间隔设置,避免作业干扰。车辆段内线路分區情况具体如表1所示。
1.2 驾驶区之间设转换轨
车辆段内自动驾驶区的控制权一般在OCC,也可在车辆段控制中心 (DCC),列车在正常工况下均为无人驾驶。人工驾驶区的控制权在DCC,在此区列车处于人工驾驶或调机牵引/推送工况。因此,两区之间需设置转换轨,满足列车自动驾驶与人工驾驶模式转换的需要。
1.3 停车列检库划分防护分区
停车列检库设置在自动驾驶区,为方便人员进出及保证作业安全,将停车列检库分为多个防护分区,各个防护分区用铁栅栏形成物理隔离。另外,在库中部、库后端设置通往各防护分区的地下通道或天桥,通道在每个防护分区设1个或2个出入口,并在出入口设置门禁。
1.4 停车列检库长度增加
停车列检库内每列位的长度需考虑列车距信号机的瞭望距离、列车长度和安全保护距离。列车在停车列检库内自动运行时,该防护分区不能有人,而且列车库内移车作业流程较烦琐,为减少库内移车作业,库内应设100%检查坑。
1.5 洗车实现全自动化
在车辆段日常作业中,列车外皮清洗较为频繁,每列车每周清洗1次,通常在早、晚高峰后入段时清洗。由于洗车作业与出入段线、停车列检线联系紧密,因此将其划分在自动驾驶区,且列车自动运行可提高洗车效率。洗车机应具备全自动洗车模式,以及与信号系统的接口,以实现全自动洗车。
1.6 自动驾驶区库门与信号系统联锁
在北方地区,停车列检库及洗车库宜设置自动车库门并纳入信号系统监控,并应具有车库门故障旁路功能。
2 车辆段总平面布置
根据车辆段与接轨站的关系,车辆段总平面布置分为贯通式和尽端式布置2种。贯通式布置是在运用库库线两端均设置咽喉区,前后2个咽喉区之间设置走行线连通,并通过2个接轨站分别设置出入段线与运用库两端连通。尽端式布置只在运用库的一个方向设置咽喉区,与车辆段接轨站连接。在实际应用中,贯通式布置受到的条件限制较多,应结合段址情况和站段关系统一考量,往往可遇而不可求,国内大多数车辆段采用尽端式布置。根据运用库与检修库的位置及股道连接关系,地铁车辆段总平面尽端式布置又可分为横列式和纵列式(包括顺向和反向)段型2种。
2.1 横列式段型
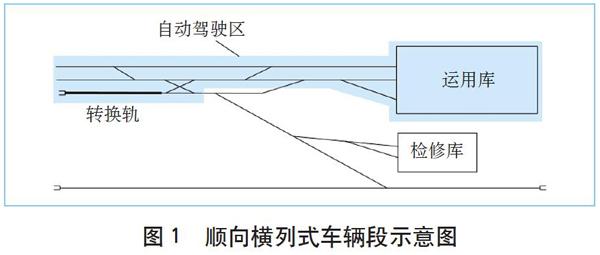
横列式段型是检修库和运用库顺向横列布置,运用库和检修库通过咽喉区的牵出线连接。顺向横列式总平面布置最为常见,相比反向纵列式,其调车作业顺畅,生产区相对集中。但顺向横列式布置的检修库与运用库是并列布置,2个库前会形成较大的咽喉区,占地相对较大,布局不够紧凑。
图1为顺向横列式车辆段示意图,周月检库位于检修库中,划为人工驾驶区,利用咽喉区的牵出线兼做转换轨。此段型总体工艺较为顺畅,但存在以下2点不足。
(1)自动驾驶区和人工驾驶区的分区不够明确,转换轨(牵出线)在自动驾驶区内。通常自动驾驶区控制权在OCC,人工驾驶区控制权在DCC时,列车从牵出线到检修库需要DCC和OCC双方调度员排进路,需多次对接,检修列车转线作业需要向OCC申请进路。
(2)周月检线划为人工驾驶区,人员检修作业较为灵活,但车辆扣修/修竣出入周月检库需要“之”字走行。
2.2 纵列式段型
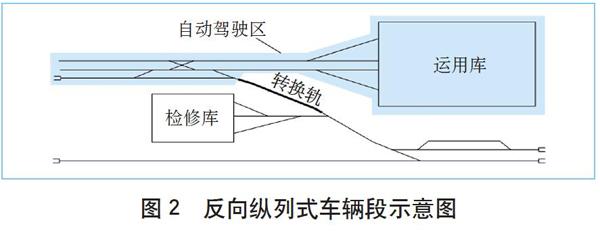
反向纵列式段型是检修库和运用库纵列布置,运用库和检修库之间需“之”字形折返调车。图2为反向纵列式车辆段示意图,周月检库位于运用库中,划为自动驾驶区,利用运用库与检修库之间的联络线兼做转换轨,自动驾驶区和人工驾驶区物理分区明确,检修调车作业灵活,不需要向OCC申请进路。
顺向纵列式段型是检修库与运用库纵列布置,两库之间通过走行线和咽喉区的牵出线连接。图3为顺向纵列式车辆段示意图,周月检库位于运用库中,划为自动驾驶区。自动驾驶区和人工驾驶区的转换轨设置在联络线上,两区分区明确,车辆驾驶模式转换顺畅。
纵列式段型有利于自动驾驶区和人工驾驶区物理分区明确,可将转换轨设置在两区域之间的联络线上。其具有以下优点。
(1)无论自动驾驶区与人工驾驶区的控制权在DCC还是OCC,双方调度员的责任分区明确,驾驶模式转换顺畅。
(2)牵出线专用于检修列车转线作业,可由DCC直接调度,不再通过OCC,转线作业灵活方便。
2.3 其他建议
(1)由于列车双周三月检较为频繁,总平面布置应考虑检修人员作业便捷性及车辆出入周月检库的便捷性。
(2)自动驾驶区与人工驾驶区作业有较多交叉时,建议段内两区的信号均由DCC控制。
3 车辆段运用检修设施设计
全自动运行列车的采用除对总平面布置带来较大的影响外,对车辆段运用检修设施的影响也较大,主要包括停车列检库、牵出线(转换轨)和洗车库。
3.1 停车列检库
3.1.1 库长
因采用全自动运行技术,停车列检库需考虑列车自动保护系统(ATP)信号的安全防护距离,增加相应长度。停车列检库内每列位的安全保护距离宜为20m。合肥市轨道交通车辆段停车列检库2列位列车间距≥25m,末端列位列车距车挡≥20m。成都地铁规定,停车列检库2列位检查坑端部间距≥20m,末端列位检查坑端部距车挡≥15 m。
综上,运用库库长应满足2列位列车间距≥25 m,末端列位列车距车挡≥20 m,此安全距离适用于大部分信号、车辆厂商,如图4所示。具体防护距离应以信号设备厂商要求为准。
3.1.2 防护分区
库内设置防护分区,每个分区设人员防护开关(SPKS),当作业人员进入防护分区时,防护分区对应股道上的列车不能移动。为减小防护分区对运营的影响,每2股道或3股道设置1个防护分区,采用金属围栏隔离。金属围栏在库内平过道处设门,平时关闭,只有在火灾等紧急情况时开启,用于人员疏散。库前平过道两端设置电动伸缩门,不另在分区设金属围栏。
3.1.3 人行通道
接触网供电时宜采用人行地道;接触轨供电时可采用人行天桥。地道建议设置于库中平过道处,以减少作业人员从地道出口到库前后列位的距离,也可设置在库后平过道处。为便于管理,建议在人行通道入口处设置岗亭或值班工位,防止未取得许可的人员随意进入地道。
3.1.4 库门
停车列检库库门宜设为自动车库门,并纳入信号监控系统,并具有车库门故障旁路功能。当气候条件允许时,可不设库门,以利于列车出入库。
3.1.5 车挡
停车列检库内车挡采用液压缓冲固定式车挡,占用线路长度一般为2.5 m。
3.2 牵出线(转换轨)
牵出线有效长度不应小于通过牵出线的列车总长度、调机长度和10 m终端安全距离之和。如合肥市轨道交通对牵出线的要求:为满足工程车双机牵引电客车(6 节编组B型车)回段調车需求,段场牵出线有效长度不应小于160 m(即1列6B电客车120m + 2 辆工程车25 m+车头距离止挡10 m+车尾距离道岔防护信号机5m)。
当牵出线作为转换轨时,其有效长度(不含车挡)应不小于列车长度+ 45 m(即40 m的安全保护距离+ 5 m的列车距信号机的距离)。
综上所述,当牵出线兼做转换轨时,其有效长度可按以下组成考虑:列车长度+ 5 m(信号瞭望距离)+ 40m(自动驾驶安全保护距离)+调机长度+ 5 m(终端安全距离及停车误差)。当列车以自动驾驶工况进入转换轨时,其安全保护距离为40 m +调机长度+ 5 m,满足信号设备要求。以调机模式使用牵出线时,调机距离车挡的安全距离按5 m考虑,调机进入牵出线后列车驶入,距调机的安全保护距离为40 m,满足信号设备要求。牵出线车挡采用液压缓冲滑动式车挡,占用线路长度一般为15m。牵出线有效长度组成如图5所示。
3.3 洗车库
贯通式洗车线有效长度由洗车机长度、洗车机前后各1列车长度和信号设备附加长度之和组成。洗车库前股道安全保护距离宜为40 m。洗车库后股道安全保护距离宜为20 m。列车在段内走行至洗车库前,速度由最高25 km/h逐渐降至5 km/h,列车清洗时速度不超过5 km/h。因此,库前的安全保护距离要求较高,库后的安全保护距离要求相对较低。下面根据不同的洗车线布置方式分析洗车线的有效长度。
3.3.1 咽喉区通过式
咽喉区通过式布置方式的洗车效率最高,在段址咽喉区长度条件允许时,应优先按通过式洗车方式布置。如图6所示,洗车库前股道的有效长度L1增加安全距离40 m;由于列车通过洗车库后速度不大于5 km/h,洗车库后股道的有效长度L2增加安全距离20 m。
3.3.2 八字线往复式
八字线往复式洗车布置方式最为常见,其洗车线的有效长度如图7所示。洗车库前股道的有效长度L1增加安全距离40 m,洗车库后股道的有效长度L2增加安全距离20 m。
3.3.3 尽端线往复式
在段址用地长度受限时,一般采用尽端线往复式洗车,其洗车线有效长度如图8所示。洗车库前股道的有效长度L1增加安全距离40 m,洗车库后股道的有效长度L2增加安全距离20 m。
车辆段内的咽喉区通过式和尽端线往复式洗车,洗车库前股道后方是洗车机,且位于自动驾驶区(无人),并不存在列车冲撞车挡或道岔的安全隐患;当用地紧张或条件困难时,洗车库前股道的有效长度可不考虑增加安全距离,控制中心排好洗车进路后,列车可直接进入库内完成洗车作业。
4 全自动运行列车对车辆段设计的其他影响分析
4.1 车辆段系统规模
车辆段的功能、规模和各项设施的配置,应满足系统设计最大能力的需要。系统设计能力是指线路的各项设备设施整体所具备的支持列车运行密度的能力,常规地铁线路中,系统能力大多按行车密度30对/ h设计。
全自动运行列车的应用,可以缩短列车的折返时间,提高行车密度,从而导致运用车数增加,影响到车辆段的系统规模。采用全自动运行列车的线路具备提高系统设计能力的条件,应根据线路情况,重新论证系统设计能力,而不是机械的套用30对/h。系统能力的提高将使车辆段占地增大,此时车辆段设计应做好近远期结合,避免土地资源长期闲置。
4.2 正线停车线停车
全自动运行列车可实现无人驾驶,无需列车乘务员的出退勤管理,车站停车线仍具备自动休眠、唤醒功能。随着智能运维模式的探索推广,大量的智能监测设备在场段和正线上投入使用,列车将不再需要每日回段日检,增大列车日常检查间隔是一种趋势。此外,全自动驾驶模式利用车站停车线停车将更加灵活,减少了列车空走距离,提高了运营灵活性,从而可减小车辆段的停车列检库规模。目前,由于全自动运行模式尚需经验积累,停车列检规模暂不宜考虑车站停车,但可在一定程度上防范由于系统能力增大带来的场段停车能力不足的风险。
4.3 运用车数量
全自动运行列车的应用减少了列车出入段时间、折返时间、停站时间,从而使列车平均周转时间缩短,上线运用车数量相应减少,配属车数随之减少,从而导致车辆段的规模缩小。行车组织运营仿真应按全自动运行模式进行,可准确确定车辆段规模,提高设计精确性。
4.4 备用控制中心
采用全自动运行列车的线路宜设置备用控制中心,当主用控制中心发生故障时,可实时切换到备用控制中心。一般设置简易的备用控制中心,常设置在车辆段,建议与DCC合设,最大程度地实现场地、设备和人员的共享。
5 结语
全自动运行列车在城市轨道交通工程中逐渐被采用,对车辆段的设计产生了较大的影响。原有的车辆段设计理念已不能满足全自动运行列车的需求,需要在实践中不断积累自动化场段设计经验,丰富设计思路。期望本文针对全自动运行列车车辆段设计研究所得出的结论和建议为相关设计提供借鉴和参考。
参考文献
[1]城市轨道交通列车通信与运行控制国家工程实验室,城市轨道交通全自动运行系统与安全监控北京市重点实验室.城市轨道交通全自动运行系统建设指南[R].北京,2017.
[2] GB 50157-2013 地铁设计规范[S].北京:中国建筑工业出版社,2013.
[3]肖瑞金. 轨道交通全自动运行车辆段设计研究[J].都市快轨交通,2018,31(1):58-66.
[4]徐久勇. 地铁车辆段尽端式总平面布置研究[J].铁道工程学报,2014(4):93-97.
[5]黄堃. 城市轨道交通全自动运行车辆段总平面布置策略研究[J].甘肅科技,2019,35(6):29-32,13.
[6]高照学. 基于无人驾驶的地铁车辆段总图设计探讨[J].现代城市轨道交通,2017(4):46-49,68.
[7]宁滨,郜春海,李开成,等.中国城市轨道交通全自动运行系统技术及应用[J].北京交通大学学报,2019,43(1):1-6.
[8]郭泽阔. 全自动驾驶车辆段总体布局方案设计[J].都市快轨交通,2017,30(2):42-47.
[9]张明. 全自动运行地铁车辆基地工艺设计研究[J].现代城市轨道交通,2018(5):42-44.
[10] 彭显辰,杨子亮,陈文昕,等. 合肥轨道交通6号线全自动运行系统专题研究报告[R].陕西西安:中铁第一勘察设计院集团有限公司,2018.
收稿日期 2019-12-05
责任编辑 党选丽
Research on design of FAO train depot for
urban rail transit
Yang Ziliang
Abstract: Firstly, this paper summarizes the main changes brought by the FAO train to the depot design, and analyzes the design features and precautions of the general layout of different sections of the depot. Secondly, it studies the changes of the main design parameters of the depot parking garage, switching track and cleaning and washing garage, and gives design suggestions. In the final conclusion, it points out the other influences of the design of the FAO train onto the depot. The conclusions and suggestions provide references and basis for the general layout design and process design of FAO train depot.
Keywords: urban rail transit, fully automated operation (FAO) train, vehicle depot, design, research
作者简介:杨子亮(1983—),男,高级工程师
猜你喜欢
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
科技创新与应用(2016年34期)2016-12-23
继续教育(2016年11期)2016-11-24
价值工程(2016年30期)2016-11-24
企业技术开发·下旬刊(2016年9期)2016-11-23
数字技术与应用(2016年9期)2016-11-09
考试周刊(2016年79期)2016-10-13
科技传播(2012年10期)2012-06-06