
一种机载LiDAR点云电力线自动提取和重建方法
2020-06-02 06:02黄漪
铁路计算机应用 2020年5期
黄 漪
(中国铁路设计集团有限公司 工程实验室,天津300251)
在铁路电力线设计过程中,要综合考虑铁路生活区、铁路配电设备位置及铁路电力使用高压线路等因素,对沿线电力线进行管理和监测。随着铁路运输任务愈加繁忙和列车运行速度的不断提高,更需要加强对铁路沿线区域输电线路的定期巡检。机载激光雷达(LiDAR,LightDetectionandRanging)技术作为近年来快速发展的新型技术,可以进行全天候空中测量,快速获取高精度的数据信息,提高电力巡检的效率,因此广泛应用于电力线检测领域[1-3]。
近年来基于机载LiDAR 技术的电力线巡检日臻成熟,电力线点云的提取和三维重建技术也受到了广泛关注。McLaughlin[4]利用基于知识的监督分类方法,根据维数特征自动将点云分类,然后利用局部仿射模型进行电力线提取,初始仿射模型的选取好坏对电力线提取有较大影响;Melzer 和Brises[5]采用迭代Hough 变换的方法在XOY平面提取电力线,利用随机抽样一致算法进行电力线拟合,此方法对小范围区域电力线提取效果较好;Jwa 等人[6]综合利用Hough 变换、特征向量和点云密度来提取电力线点云,并提出分段悬链线模型拟合方法来重构电力线;余洁[7]采用滤波的方法滤除地面点和植被点,采用Hough 变换分离各条电力线,并根据双曲余弦函数拟合单条电力线。
基于Hough 变换的电力线提取方法将三维点云转化至二维空间,再利用Hough 变换检测直线,此类方法损失了点云的高程信息,而且计算过程复杂。由于两塔之间的电力线通常近似垂直排列,因此投影到XOY 平面易出现重叠或者近似重叠。传统的Hough变换[8-10]只能提取出一根直线,很难快速实现单条电力线分离,容易出现漏检的情况。因此,实现LiDAR 点云数据单根电力线分离,是实现电力线点云拟合重建的关键步骤。为解决这一问题,陈驰[11]提出利用同一条电力线的局部相邻点高程接近的原则,统计每条电力线在XOY 投影面上的邻近点,判断其高程差是否超过阈值,若超过阈值,则认为该条直线对应多条电力线;段敏燕[12]提出了一种采用特征空间K-means聚类的单根电力线LiDAR 点云分割方法,主要思想是将LiDAR 点云进行分段,然后将分段点云投影到相应电力线的切平面,最后使用K-means聚类方法进行投影点聚类,该聚类方法在电力线数据已知的情况下,可以较好的提取电力线。针对平面投影近似重叠的电力线点云,本文提出一种机载LiDAR 点云电力线自动提取和重建算法。
1 电力线提取算法
1.1 确定XOY平面投影直线
电力线在XOY 平面的投影为直线,且这些直线相互平行,因此可以利用投影特性来确定平面投影走向。文献中大多采用Hough变换的方法进行投影直线提取,即对电力线点云坐标进行二维Hough 变换,再利用图像处理方法提取直线方程(可能会有多条),基于这些直线方程统计分析出电力线的主方向,即可计算出电力线在XOY 平面的投影直线方程。然而,Hough 变换计算过程复杂,对于平面位置近似或重叠的多层电力线点云,不能快速实现单条电力线分类。
综上,如图1所示,本文利用直线拟合法和主成分分析法先确定2 条投影直线,如果2条直线方向相差较小,如图1a 所示,点云平面密度分布较好,选取二者的平均方向作为投影直线方向;如果二者方向相差较大,如图1b 所示,点云平面密度分布不均匀,可能存在电力线断裂的情况,此时需采用Hough 变换的方法计算投影直线方程。由于直线拟合法和主成分分析法计算简单,对于点云分布较好的情况可避免采用复杂的Hough 变换,从而提高确定投影直线方程的效率。
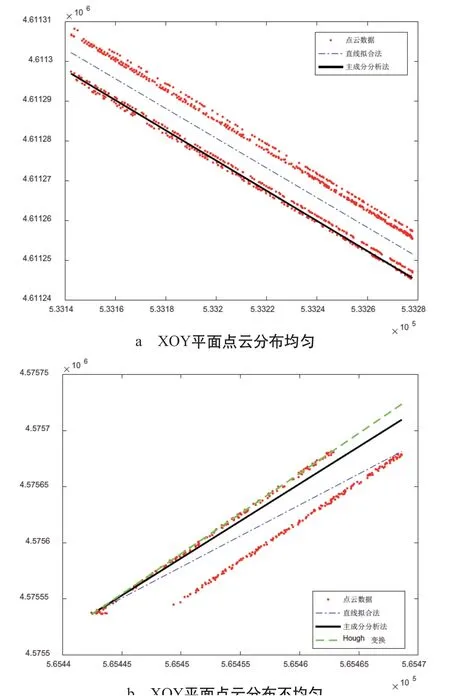
图1 确定XOY平面投影直线示意
1.2 分离2股电力线
对于2根电线杆之间的电力线,投影到XOY 平面上电力线的典型分布为2股直线,每股直线包含平面投影位置相近的多条电力线,在提取单根电力线之前需要将2 股电力线点云分离。通过投影平面走向直线且垂直于XOY 的平面称为走向平面。选择合适的走向平面可以将2 股电力线点云分离,并且使属于同一股的点云到走向平面的距离基本相同。
综上,可以采用基于投影距离的K-means聚类方法,将2 股电力线进行分离。具体过程为:
(1)选取一个不在2股电力线之间的点P0=(xmin,0.8ymin,0),其中,xmin、ymin分别为点云的最小横坐标和纵坐标,选择0.8ymin使得投影距离有较好的区分度;
(2)根据电力线在XOY平面走向,计算投影直线以及过投影直线的走向平面;
(3)计算2 股电力线的点到走向平面的距离,设投影直线方向向量为轴的方向向量为那么过点P0的走向平面法线为从而任意一点P到走向平面的距离计算公式为:

2股点云的XOY 平面俯视图如图2 所示,2股电力线的投影平均距离d2>d1,且相差明显,根据距离利用K-means聚类进行二分类,可以很好地将2股电力线分离。
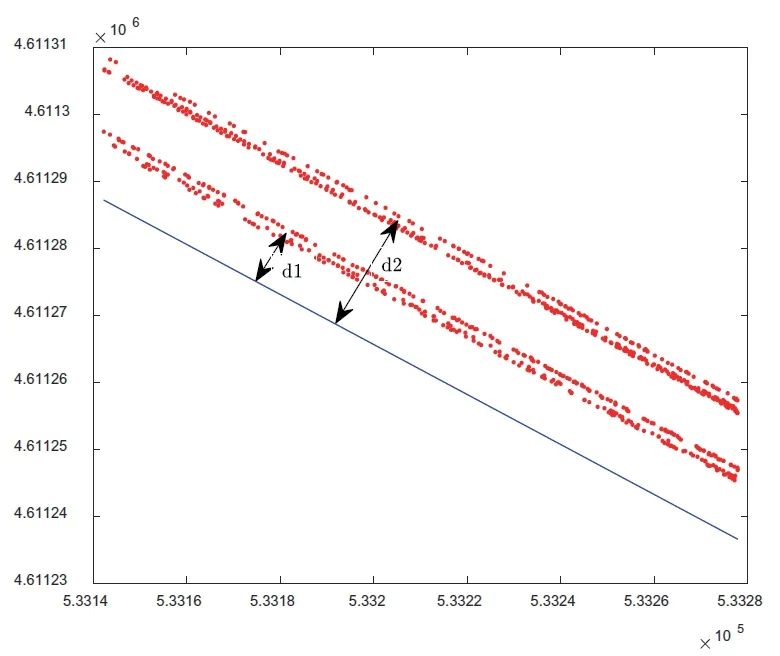
图22 股点云XOY平面俯视图

图3 垂直于走向的截面投影示意
1.3 提取单根电力线
将2股电力线分离后,每股电力线包含多条平面位置相近但是高程不同的多根电力线,难点是将这些单根电力线提取出来[12-14]。本文设计了一种基于区域分块点云聚类的单根电力线提取方法。
(1)沿电力线走向均匀选取一系列长方体,将长方体内的点云投影到垂直于走向的截面上,如图3所示,此时属于同一根电力线的投影点聚集在一起。
(2)采用Davies-Bouldin 指标进行聚类分析,以此来确定聚类镞数。需要注意的是,平面投影相近的电力线往往存在断链,每个长方体内聚类镞数可能不同,可以利用采样结果统计频率得出电力线的数目。
Davies-Bouldin指标描述样本的类内散度与各聚类中心的间距,以每个类中样本之间平均距离之和除以聚类中心点距离为度量,其定义为:

其中,K是聚类数目,Wi表示类Ci中的所有样本到类Ci中心的平均距离,Wj表示类Cj中所有样本到类Cj中心的平均距离,Cij表示类Ci和类Cj中心之间的距离。可直观地看出,Wi+Wj越小、Cij越大,则DB越小,类与类之间的相似度越低,从而对应越好的聚类效果。因此可以通过先验选定聚类数目区间[Kmin,Kmax](通常可选择[2,10]),对数据集使用不同的聚类数K∈[Kmin,Kmax]应用同一聚类算法,得到一系列聚类结果,对每个结果计算其有效性指标,比较各个指标值,对应最佳指标值的聚类数即为最佳聚类数。
(3)利用电力线投影到走向平面近似为二次曲线的特点,将电力线进行二次曲线拟合。每根电力线的点到拟合抛物线的距离不同,再结合已经计算出的电力线数目,利用K-means聚类可以快速地将单根电力线提取出来。
1.4 三维电力线拟合
电力线是两端固定、中间自然垂落的悬链线,可以用单根点云去拟合悬链线方程,但是此类方程比较复杂[15]。本文采用二次函数拟合的方法对电力线进行空间建模[16]。先拟合在投影平面的抛物线,然后根据其在三维空间的平面坐标,计算出高程坐标,拟合公式为:

其中,a、b、c为拟合参数。设单根电力线的起始点坐标为(x0,y0,z0),过此点的XOY 平面的投影方程为y=kx+l,其中,k、l为投影方程参数,那么投影直线的单位方向为设电力线的起点到终点沿XOY 平面的距离为s,拟合电力线点数为n,拟合电力线坐标公式为:

其中,i=0,1,2,…,n。
2 实验验证分析
本文采用东北某铁路沿线区域机载LiDAR 点云电力线数据进行实验验证,线路长度约为149m,总点数为799个,点云平均密度约为每平方米9个点。该实验数据包含6条电力线,原始点云数据如图4所示。

图4 原始点云
2.1 实验过程
(1)确定XOY平面的走向直线,本文采用直线拟合法和主成分分析法,拟合效果良好,避免直接使用Hough 变换方法,如图5所示;
(2)利用基于投影距离的K-means聚类方法将平面位置相近的各股电力线分离出来,图6为其中一股电力线;
(3)根据单根电力线投影点聚集的特性,采用Davis-Bouldin 指标的最佳聚类数判定方法,自动计算电力线条数,提取出每条电力线,如图7所示;
(4)对单根电力线在投影平面进行最小二乘拟合,然后进行三维重建,恢复电力线的三维特性,如图8~图10 所示。从重建图中可以看出,电力线点云拟合效果较好。
2.2 精度分析
为了验证点云拟合的精度,本文采用文献[16]中的误差评价方式,计算XOY 平面和拟合平面内上下点与拟合模型之间的正负误差代数和的平均值。

图5 确定点云走向直线示意
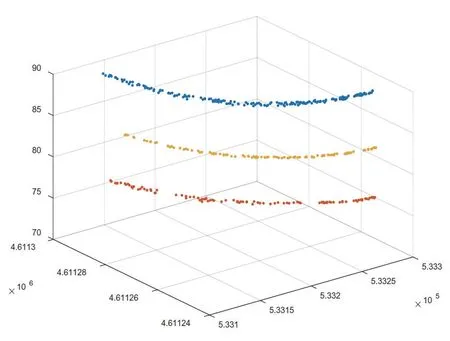
图6 平面投影位置相近的电力线示意

图7 投影点聚集特性示意

图8 投影平面的单根电力线拟合示意

图9 单根电力线三维重建示意

图10 电力线三维重建效果
在XOY 平面内,设电力线走向方程为Ax+By+C=0(A≥0),其中,A、B、C为电力线方程参数,对于任一点坐标(xi,yi,zi),当Axi+Byi+C≥0时,,当Axi+Byi+C<0时,,其中di表示电力线点数据到走向点的垂距,水平误差均值为n表示电力线点数。
如表1所示,对电力线的拟合在水平和竖直平面均达到了较高的精度,说明本文对电力线点云提取和重建的方法有效可行。

表1 电力线拟合参数 单位:cm
2.3 点云数据缺失情况
由于平面位置相近的多层电力线可能存在遮挡,电力线点云会存在中间缺失的情况,导致传统的电力线拟合方法可能存在漏检的情况。本文先根据截面点云聚类分析来确定电力线的条数,再进行基于空间距离的K-means聚类分析,因此可以有效的避免漏检的情况,提高电力线拟合的精度。
仿真实验选择中间点云数据缺失的电力线数据,同时利用本文的方法和TerraSolid 软件进行电力线拟合重建,效果如图11、图12所示。
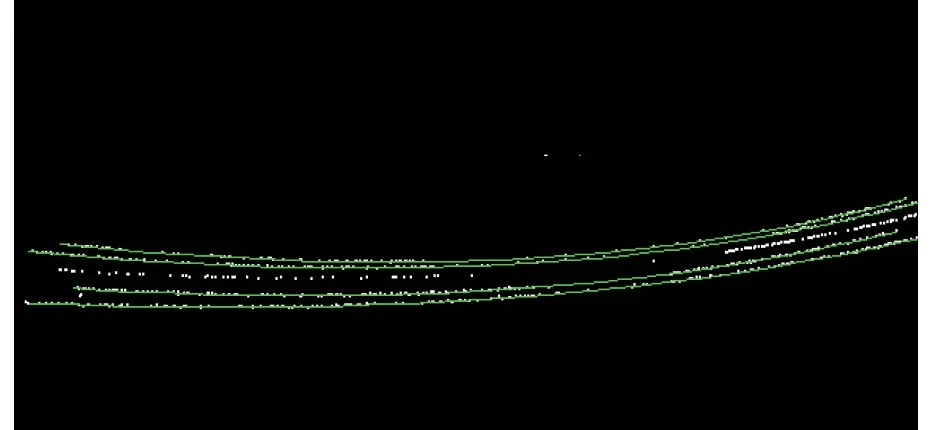
图11 TerraSolid软件电力线重建效果图

图12 本文方法电力线重建效果图
对比发现,TerraSolid软件对于中间有数据缺失的电力线存在漏检的情况,本文的方法仍可以将电力线完整的重建出来。
3 结束语
本文针对机载LiDAR 铁路电力线点云特性,尤其是水平投影近似重叠的情况,提出一种电力线自动提取的方法。实验表明,该方法能快速、完整地基于机载LiDAR 点云数据重建电力线,并且针对中间点云数据缺失的情况也能达到很好的拟合效果,具有推广应用价值。后续将进一步研究对点云数据中电力线、电塔、接触网杆的自动分类提取,形成一套完整的电力线自动提取重建方法。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中外文摘(2022年12期)2022-08-02
军事文摘(2022年8期)2022-05-25
无人机(2021年6期)2021-05-26
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
建材发展导向(2019年10期)2019-08-24
测绘通报(2019年7期)2019-08-07
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
中国计算机报(2009年30期)2009-04-27
