
基于IPM的交流伺服驱动器低速抖动的解决方案
2020-06-10 07:40钱勇熊爱中
电子技术与软件工程 2020年4期
钱勇 熊爱中
(1.苏州大学 江苏省苏州市 215000 2.新代科技(苏州)有限公司 江苏省苏州市 215000)
IPM智能功率模块不仅将电力电子开关器件和驱动电路集成在一起,内部同时集成了过电压,过电流和过热等检测电路,并可以将故障信息传递给DSP芯片,目前IPM智能功率模块广泛地应用于变频器,伺服驱动器等设备上。
伺服驱动器产品主要应用于高精度数控机床,机器人,轨道交通等行业,需要高精度高分辨率,在实际使用过程中会出现低速抖动等情况,针对此类问题,需要提出修改Sigma Delta滤波器模块(SDFM)硬件电路设计来改善低速抖动的情况。
1 IPM智能功率模块内部架构
本文主要简述三菱IPM模块,IPM内部架构主要如图1所示,此类IPM属于C型IPM模块,包含6臂IGBT(IGBT1---IGBT6),6个快恢复二极管(Di1-Di6),上臂半桥集成电路(HVIC)和下臂半桥集成电路(LVIC),其中HVIC的核心是低压CMOS与高压LDMOS的组合,主要采用窄脉冲电平位移技术实现从低电压向高压电平的转换,从而用于上臂IGBT控制,并采用自举电容电路(bootstrap Circuit)获得上臂浮动电源,这使得驱动电路的设计得到极大的简化,成本得到降低,在逆变器,伺服驱动器等功率变换器件中得到应用。

图1:IPM内部架构图

图2:栅极驱动电路
2 IPM用于伺服驱动的栅极控制电路
IPM驱动电路主要是由自举电路(bootstrap Circuit),驱动芯片(Driver IC)和IGBT组成,图2为IPM的栅极驱动控制电路模型,IPM选用了三菱公司生产的PSS25SA2FT。
自举电路(bootstrap Circuit)主要提供上臂IGBT栅极驱动能力,其中基本包含了自举电容bootstrap C,自举二极管bootstrap D和限流电阻bootstrap R,其中自举电容bootstrap C提供上臂IGBT推载能力,自举二极管防止电流回充,限制电流方向,但是会产生顺偏的管压降,bootstrap R是一个限流电阻,决定电容充电时间的快慢。
自举电路的目的就是让上臂的Gate-Emitter端有一个足够的能量去开起上臂的IGBT,而此能量就是通过对bootstrap C充电进而达成目的。上臂IGBT与下臂IGBT是迭接的方式连接而成,因此上臂开启所需的能量是上臂的栅极与上臂的发射极间需要一定的跨压,但当下臂关闭时,上臂准位处于微浮接的状态,有机会导致误动作误开启IGBT,因此藉由bootstrap C提供GE端一个稳定的电压信号Vge。
在初始状态自举电容(bootstrap C)上无电荷时,控制端会先通过LVIC将N侧IGBT开启,此时U.V.W为N(GND)低电位,HVIC和LVIC的控制电源15V会通过自举电路对自举电容充电,当bootstrap C充到一定标准后,LVIC会关闭N侧IGBT,而HVIC会发出ON的命令通过bootstrap C上的能量去驱动上臂IGBT开启,以此充放电方式不断重复,进而可使U,V,W输出;而栅极驱动电路是采用光电耦合隔离方式使得控制端弱电侧和功率端强电侧进行隔离,TI的ISO7760F这款芯片在单一IC就有6个独立的光电隔离通道,所以只要1颗IC就可以满足一轴6臂PWM讯号的需求;ISO7760F一次侧界面为逻辑输入缓冲器(logic input buffer)无需推动电流,故可以DSP逻辑直接推动。
3 伺服驱动器的电流回路模型
对于一般永磁电机控制而言,Id电流命令为零,而Iq电流命令则是直接正比于扭力命令大小。此两轴电流命令分别与后级上电流传感器所感测到的电流回授相减,得到电流误差,此差值经过电流回路控制器的调节,输出两轴电压命令,然后此两轴电压命令会根据透过反坐标转换,转为ABC三相电压命令。再透过电压空间向量波宽调变(SVPWM),计算出功率模块三桥分别需要的开启时间。DSP所提供的ePWM模块,可以设定上下臂所需要保留的死区时间,自动换算成IGBT六个栅极信号。
3.1 交流伺服驱动器的电流回路模型
交流伺服驱动器的电流回路模型如图3所示,其中Matlab/simulink模型部分主要包含:
(1)扭力控制:接受用户输入的扭力命令,并将其转换为Id、Iq电流命令;
(2)TI SDFM模 块:设 定OSR(Over Samping Rate),sinck Filter,接受后级SDFM IC之Clock与Data讯号,解出相电流;
(3)电流校正:通过调节得到电流传感器之线性误差校正量(Gain/Offset),并在此补偿于相电流上;
(4)坐标转换:通过Clarke与Park转换将三相电流转换为Id与Iq电流反馈;
(5)电流控制:d-q轴各有一组PI控制器,并加入d-q耦合控件,将d-q轴电流误差计算后输出d-q轴电压命令;
(6)反坐标转换:根据转子位置或扭力命令之频率,将d-q轴电压命令转换为固定坐标系的alpha-beta电压命令;
(7)SVPWM模块:通过Space-Vector PWM技巧,将电压命令转换为功率模块三臂开关时间;
(8)TI ePWM模块:根据设定的死区时间与PWM compare,计算出六个开关之on-off讯号,输出给功率部分。
3.2 Sigma Delta滤波器模块(SDFM)模型
主要参考模型为TI之AMC1303 Model,AMC1303如图4为双前馈Modulator,我们将在Simulink中进行建模。
经过上述Sigma-Delta Modulator调制后,模拟值即会转为1bit 10Mhz的脉冲量,即可通过数字信号的方式传输过,而输出信号的1与0的占比,即反应调制的模拟量;而解调变之方式,则是通过SINC3滤波器,将信号还原为原本之模拟值.多组积分器与微分器之组合,而积分器与微分器间则以比输入信号流(10Mhz),以低很多的速率(fDR)通过被称为过采样率(OSR)的因子取样与输出数据。
SINC N滤波器的转移函数,则可以用以下公式描述:

图3:电流回路模型

图4:AMC1301模型

图5:SNR对比曲线

图6:独立电源三相电流波形 1
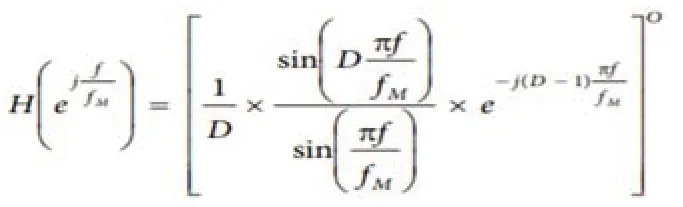
其中O为滤波器阶数(3),FM为Modulation clock(10Mhz),D为过采样率(OSR)。
我们也将此模型的SNR曲线与TI原厂Datasheet进行比较(相同测试情况),基本上仿真与实际的SNR的曲线几乎一致,代表模型可以仿真出Sigma Delta IC与SDFM实际量测的特性。SNR对比曲线如图5所示。
4 伺服驱动器低速抖动解决方案
在实际速度闭回路控制模式下,在低速情况下(50-100rpm)控制永磁同步电机(PMSM)时刻,发现三相电流ABC反馈值不平衡,其中C相电流相比于UV相,电流值仅为UV相电流的75%,由此需要确认IPM六个开关之推动信号Vge是否相同,因封装于IPM内部的Vge无法量测,故量测了供给IPM上臂的bootstrap自举电容的跨压,发现A B两相的自举电容两端跨压比C相小,A B两相约为12.6~14.3V,C相则为15.1~16.6V左右,由此发现因目前架构中采用两相电流Ia Ib采样电路,Ic依据电流和为0,计算得出,16v作为自举电路的充电电源同时也给SDFM供电,导致三相充电速率表现不一致,进而造成微小的相电流损耗(约20mA),目前提出将SDFM元件的电源修改为5V独立电源,而三相的自举电路电源bootstrap都是自举电容供电,发现三相电流变为平衡,如图6所示,低频抖动消失,判断此种供电方式可以有效的解决低速抖动,控制效果不佳的问题。
猜你喜欢
中国临床医学影像杂志(2022年2期)2022-05-25
真空与低温(2022年2期)2022-03-30
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
组织工程与重建外科杂志(2020年2期)2020-12-09
中国临床医学影像杂志(2019年4期)2019-06-18
制造技术与机床(2017年10期)2017-11-28
电源技术(2015年7期)2015-08-22
微特电机(2015年1期)2015-07-09
电测与仪表(2014年21期)2014-04-04
