
基于阿里云平台的输电线路弧垂监控系统
2020-06-10 07:41李捍平徐健丛赟李小炳
电子技术与软件工程 2020年4期
李捍平 徐健 丛赟 李小炳
(国网浙江省电力公司舟山建设分公司 浙江省舟山市 316000)
1 引言
目前,在输电线路建设中架线施工是关键的工序之一,而电线高度检测装备则是张力架线施工的关键设备,架空输电线路的弧垂高度以及位置安全施工的重要指标之一,此外,输电线路的受力负荷和施工环境条件都会造成弧垂高度的改变。一方面,弧垂高度过低会造成重大安全事故,尤其是在交叉跨越、人烟密集和大跨越地段,另一方面,高度过高则会使电线承受过大的张力,同时给施工带来诸多难度。
基于上述需求,相关人员进行了深入研究,国内外电力科研及运行单位对架空输电线路弧垂在线监测和牵张机牵引力自动控制的研究已进行了多年,提出了实际有效的监测方法,但仍然存在下述主要问题:
(1)目前方法的测量过程较为繁琐,且由于传感器检测装置的缺陷和测量结果数据的处理较为复杂,导致弧垂结果精度较低往往无法达到较高的精度;
(2)现有方法仅仅考虑了弧垂高度的测量,忽略了弧垂定位的测量,这会导致安全隐患的发生;
(3)没有通过实时在线检测牵引绳的牵引力和架空输电线路的弧垂高度、弧垂定位等数据来可靠地控制牵张机工作在安全状态,容易造成安全事故。
2 基于UWB技术的弧垂测量原理
UWB测距方法分为接收信号强度法(RSSI)和到达时间法(TOA)两种,其中,RSSI精度低,仅限于粗糙测距,本论文将采用精度较高的TOA,TOA又包括双程测距(TWR)和单程测距(OWR),TWR适用于监测装置间没有公共时钟的情况,而OWR在监测装置间有公共时钟的情况下使用。
OWR的测距原理是由基于UWB波的传输时间差来决定,假设A为参考监测装置,B为目标监测装置,现测量A、B监测装置之间的距离。在测距前对监测装置A、B进行同步检测和同步调整,监测装置A在T0时刻发送信号给监测装置B,监测装置B在T1时刻收到信号,则监测装置A、B间的距离dAB可以由下式得到:

式中c为UWB的传播速度,TAB为UWB 波在A、B之间的传播时间,TAB可由下列公式求得:

基于UWB波之OWR测距技术的电力线弧垂测量原理如图1所示,y为架空输电线路弧垂距离地面的垂直高度,x为架空输电线路弧垂距离固定UWB测距装置A之间的平行地面距离,也就是弧垂的定位距离,c为固定UWB测距装置A和固定UWB测距装置B之间的距离,a为垂点和固定UWB测距装置A之间的距离,b为垂点和固定UWB测距装置B之间的距离,θ1为垂点和固定UWB测距装置A连线对地面形成的夹角,θ2为垂点和固定UWB测距装置B连线对地面形成的夹角。
电力线弧垂定位和弧垂高度可按如下方程组求得:


图1:基于UWB波的电力线弧垂测量示意图
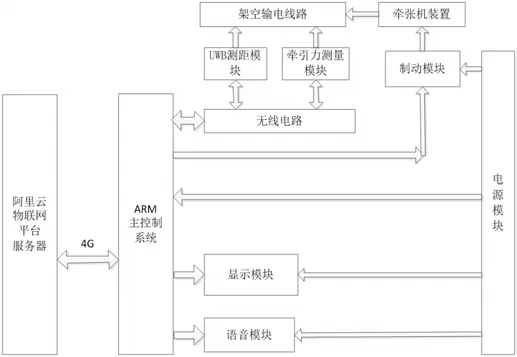
图2:基于UWB波的电力线弧垂测量装置结构图
3 基于UWB技术弧垂测量系统的具体实现
为实现上述测量原理,论文设计了如图2所示的弧垂在线监测系统,该系统包括UWB滑动测距模块(1)、UWB固定测距模块(2)、牵引力测量模块(3)、显示模块(4)、语音模块(5)、制动模块(6)、控制主系统(7)和电源模块(8)。其中,模块(8)分别向模块(4)、模块(5)、模块(6)、模块(7)连接供电;模块(7)分别和模块(1)、模块(2)、模块(3)连接并双向传输数据;模块(7)分别连接模块(4)、模块(5)、模块(6)并向这些模块单向传输控制命令和控制数据。
控制主系统与阿里云物联网平台服务器通过无线连接,并在控制主系统内部设置有GPS模块、数据存储模块和数据处理模块和无线电路模块,GPS模块用于定位施工人员的地理位置信息并向平台服务器传输该位置信息数据,数据存储模块存有牵张机安全工作状态的数据信息,数据处理模块用于通过所述牵引力测量模块(3)计算牵引绳的牵引力大小,数据处理模块还用于通过所述UWB滑动测距模块(1)和UWB固定测距模块(2)计算架空输电线路的弧垂高度和弧垂定位,数据处理模块还用于实时比对牵张机的当前时刻工作状态从而通过制动模块(6)调节牵张机的下一时刻工作在安全状态,无线电路模块用于连接模块(1)、模块(2)和模块(3)实现双向数据传输。

图3:基于阿里云平台的电力线弧垂物联网实时监控系统截图
UWB滑动测距模块(1)和UWB固定测距模块(2)是基于UWB原理的相同测距电路单元,包括UWB信号接受电路、UWB信号发射电路、无线电路和供电干电池。
牵引力测量模块(3)包括基于金属应变片的电桥测量电路、模数转换电路和供电干电池,金属应变片粘贴在连接电线的牵引绳一端,牵引力的大小改变带动牵引绳端和应变片一起发生相同程度的形变,电桥测量电路将应变片的形变转换为电桥输出电压大小的改变,模数转换电路将电桥输出电压转换为数据并传给控制主系统(7)。
显示模块(4)基于LCD显示原理,实时显示弧垂高度、弧垂定位和牵张机工作状态等信息数据。语音模块(5)为语音输出扬声器电路。制动模块(6)包括电子开关和数模转换电路,电子开关接受控制主系统(7)的输出控制命令并执行相应的动作,数模转换电路接受控制主系统(7)的输出控制数据并相应地改变牵张机的下一时刻工作状态。
4 基于UWB电力线弧垂测量的阿里云物联网平台的实现
阿里云物联网(IoT)是阿里巴巴集团推出的专业物联网服务平台,提供云管边端等基础产品接入及技术赋能、行业解决方案合作与实施、软硬件销售、营销推广、需求对接等快速商业变现通道,全方位对接物联网产业上亿商机。物联网平台提供安全可靠的设备连接通信能力,支持设备数据采集上云,规则引擎流转数据和云端数据下发设备端。此外,也提供方便快捷的设备管理能力,支持物模型定义,数据结构化存储,和远程调试、监控、运维。阿里云物联网平台为设备提供安全可靠的连接通信能力,向下连接海量设备,支撑设备数据采集上云;向上提供云端API,服务端通过调用云端API将指令下发至设备端,实现远程控制。物联网平台也提供了其他增值能力,如设备管理、规则引擎、数据分析、边缘计算等,为各类IoT场景和行业开发者赋能。
阿里云物联网平台的创建具体包括三步:物联网平台登入、创建产品、设备、Topic类, MQTT.fx安装及操作和上行消息、下行消息、消息内容查询。其中每一步阿里云官方都有详细的指导文档和示例。论文创建的电力线弧垂阿里云物联网平台的截图如图3所示,该平台能够实现和本地电力线弧垂测量装置实时的数据上传、预警高度值下发以及物联网端对本地测量装置声光报警器的开关控制,经过12小时的连续不间断测试和为期两个月的使用测试,没有任何故障发生,性能稳定。
猜你喜欢
炎黄地理(2021年1期)2021-06-08
科学(2020年3期)2020-01-06
小学生学习指导(低年级)(2019年11期)2019-11-25
电子制作(2017年14期)2017-12-18
电子制作(2017年7期)2017-06-05
电信科学(2016年11期)2016-11-23
中国科技信息(2015年21期)2015-11-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
创业家(2015年4期)2015-02-27
太空探索(2014年1期)2014-07-10
