
动态电能质量治理装置实时相位补偿
2020-06-10 07:41虞坚阳
电子技术与软件工程 2020年4期
虞坚阳
(国网江苏省电力有限公司常州供电分公司 江苏省常州市 213000)
随着配网智能化水平的快速提升,大量电能质量治理装置得到了广泛的应用,以有源电力滤波器(APF)、静止无功补偿装置(SVG)为代表的电能治理设备基本原理是通过检测系统或负载电流中的待补偿成份,控制全控型开关器件(IGBT)实时产生所需的反向补偿电流并注入电网,以控制系统电流功率因数或谐波畸变率。在实时补偿中,装置实际发出电流与指令电流(或负载等治理电流)之间的误差将决定最终的补偿效果,而在实时跟踪过程中,具体表现为补偿电流能否准确跟踪指令电流。通过大量的工程实际发现,补偿电流与指令电流间往往存在一定的相位延迟,这导致了设备的电能质量治理能力达不到设计要求。
1 电能质量治理设备工作原理
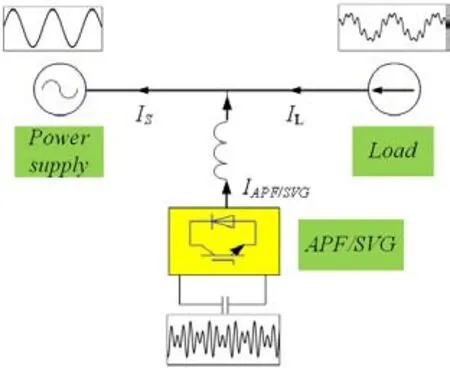
图1:电能质量治理装置基本补偿原理
1.1 基本原理
通用型电能质量治理装置(APF/SVG)的系统接入与补偿原理简图如图1所示。除动态电压恢复器(DVR)外,其余电能质量治理装置均以并联形式接入电网,通过检测负载电流(开环)或系统电流(闭环)来分离出待补偿分量,并控制APF/SVG发出反向电流不补偿这一目标量,APF/SVG与电网通常连接有单滤波电感(L)、两阶滤波器(LC)、三阶滤波器(LCL)三种类型的滤波装置。由于波滤装置的存在,开关次谐波得到很好的抑制,但同时由于滤波装置的存在,装置发出的电流与指令电流间存在波形跟踪误差。同时装置本身的其他因素也导致了更多的波形跟踪的存在。

表1:不同因素对波形跟踪的影响

图2:输出电流实时相位补偿示意图
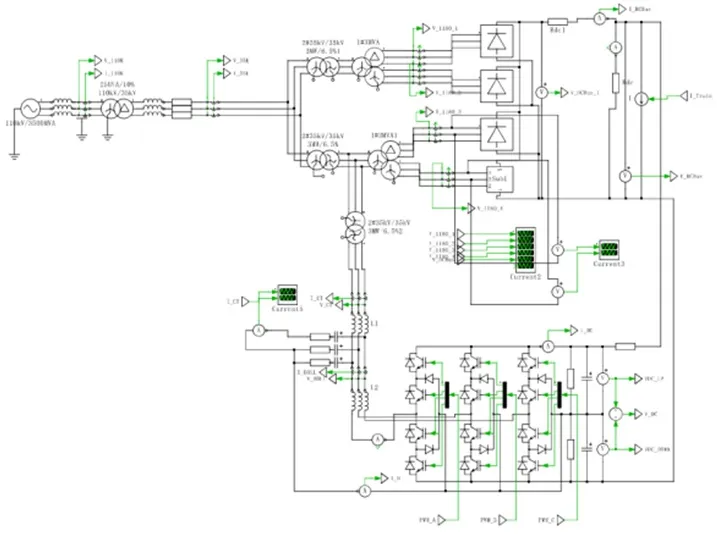
图3:PLECS模型仿真图
1.2 相位误差产生的原因
除了滤波器本身带来的相位延迟误差外,控制回路和硬件电路也会引入较多地的相位误差。具体如下分析。
控制回路误差:由于现在的电力电子设备绝大部分为数字控制系统,其包含采样、计算、指令输出、指令传输,其中采样周期通常以较高的频率执行,其对实际补偿的影响较小,以常见的AD采样芯片为例,其采样频率可达数十MHz,其采样带来的误差较小;计算过程产生的延迟通常由所采用的处理器决定,虽然高性能芯片的时钟频率可达50MHz或100MHZ,但大量复杂的数学计算导致整体的计算过程非常耗时,其对补偿的影响较大;指令输出通常产生的延时是很小的,甚至可以忽略不计;指令输出根据系统的设计不同而呈现巨大的差异,如采用光纤通读,则处理器到IGBT开关的延时可控制在数us量级,但采用485通信等方式,其延时可达数十us,其影响不可忽略。
硬件电路固有的误差:通常IGBT等开关器件各相之间在空间的布置上存在一定差别,且整体电路的电磁特性也会产生不利的影响,由此产生的同一指令在不同相的执行时效存在不同,且影响难以定性描述,通常根据实测确定。根据大量的工程经验,其对整体补偿影响不能忽视。表1是对不同的因素对补偿延迟的影响对比。
2 相位延迟误差的治理
2.1 超前控制
通过对相关延迟影响因素的分析可知,部分因素是固定的,如采样、计算指令传输等,这部分指令通常可以用固定的相位补偿不解决,常用的方法有超前控制方法。
一个常用的方法是对计算出的指令波形超前几拍下发,通过提前下发指令电流来抵消整个系统的固有总误差:

式中,N即是提前的拍数,根据实测,N取值在(1~4)时可以对补偿效果有有效的改善。需要说明的是,这种固定超前补偿方式对不同的设备、不同的相都有不同的取值,这导致了该方法不能很好解决相位延迟问题。
2.2 查表法固定补偿
一个简单的方法是对具体设备进行实测,取得其在不同频次电流下的固定延迟时间,为了更精确的实现补偿,需要将延迟从时域换算到频率,转换为不同的相位角,当发出不同频率的补偿电流时,从预先存储的表中调取相应的超前相位角,加入到补偿指令中。

2.3 相位实时校正
由于数字控制方式下的功率模块,其任何时刻发出的波形均是上一个指令的执行结果,因此可能通过实时检测不同指令下的实际跟踪误差,在下一个计算过程中将该误差以提前量形式加入到新的指令中。由于在较长的一段时间内,误差相对固定,这种实时检测和补偿可以有效抵消系统整体的相位延迟,其补偿示意图如图2所示。

相比于超前拍控制,实时控制的相位补偿体现在频域上,其补偿精度较高;相对于查表法固定补偿方法,实时计算法可以在不同时刻不同参数设定的功率模块上实现滞后相位的准确计算与实时补偿,具有非常好的跟踪精度。在计算量上,其仅增加了相位求解的反正切计算,且对所有频次波形来说,仅需一个工频周期(20ms)计算一次FFT,其复杂度是可以接受的。

图4:固定补偿仿真图
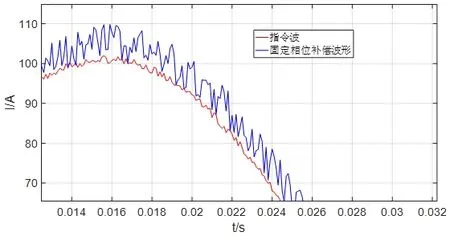
图5:固定补偿仿真图(局部)

图6:实时相位补偿仿真图

图7:实时相位补偿仿真图(局部)
3 仿真验证
为了验证所提方法的有效性,在电力电子专用仿真软件PLECS软件搭建了通用电能质量治理装置模型,装置为三相三电平拓扑,开关频率为12.8kHz,采用SVPWM调制。图3即是仿真模型图。
分别进行了固定相位补偿方式、实时相位补偿方式下的无功电流跟踪仿真。仿真结果见图4~图7。其中图4、图6是对两个工频周期的无功电流跟踪示意图,从图中对比可看出,实时相位校正后,跟踪精度得到了很好提高。
图5、图7是跟踪的局部放大图,从中也可看出,固定相位校正可以实现有效跟踪,但实时相位补偿对电流跟踪的效果更好。对不同工况下的跟踪对比也可证明两种方法的优劣,在此不再赘述。
4 结语
本文介绍了两种对电能质量治理装置进行相位延迟补偿的方法,两种方法均可对整个装置由于采样、计算、传输和滤波器带来的相位进行补偿,但实时补偿方法对不同设备、不同工况均可以准确实现相位校正,而固定相位补偿虽然计算量小,但依赖于对装置相位延迟量的准确检测且不能适应所有装置,因此推荐控制系统设计中优先使用实时相位补偿方法。
猜你喜欢
奥秘(创新大赛)(2020年1期)2020-05-22
小学科学(学生版)(2019年10期)2019-11-16
电子制作(2019年11期)2019-07-04
小哥白尼(趣味科学)(2019年12期)2019-06-15
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
电子制作(2018年16期)2018-09-26
人大建设(2018年2期)2018-04-18
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
