基于多视角立体视觉的拔节期玉米水分胁迫预测模型
2020-06-29 01:17何东健熊虹婷芦忠忠刘建敏
农业机械学报 2020年6期
何东健 熊虹婷 芦忠忠 刘建敏
(1.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100;2.农业农村部农业物联网重点实验室, 陕西杨凌 712100;3.陕西省农业信息感知与智能服务重点实验室, 陕西杨凌 712100)
0 引言
玉米是我国主要粮食作物之一,2018年我国玉米产量达2.573亿t,西北旱区是我国玉米的主要种植区。研究表明,永久或暂时干旱比其他环境因子更能改变玉米的生理过程并影响其最终产量[1]。在营养生长期,即使仅受短暂的水分胁迫,玉米叶片的伸展速率也会减慢直至停止,对最终叶面积产生永久性影响,同时加速叶片老化,影响玉米叶片进行光合作用,这是玉米受水分胁迫减产的主要原因[2]。快速检测玉米植株水分胁迫程度可为大田玉米的快速调控提供依据,对防止玉米作物受水分胁迫而导致的减产、提高干旱及半干旱地区的玉米产量具有重要意义。
目前,检测植物水分胁迫程度的方法主要有基于生理特性指标(植物茎流、水势、蒸腾速度、茎体水分)和基于形态(2D图像、3D图像、光谱特征)两类[3]。基于生理特性指标的方法虽具有较高的检测精度,但操作复杂,并且对植物具有不同程度的损害。因此,采用基于形态的水分胁迫检测方法更适合于大田作物。SRITARAPIPAT等[4]采用图像处理技术测量田间水稻的高度,具有较高的准确性。FONT等[5]通过计算叶片和茎秆的夹角来判断植物的水分胁迫状况。为解决基于2D图像的植株参数获取因缺失深度信息而造成不准确的问题,宗泽等[6]使用光学混合传感器(Photonics mixer device, PMD)深度相机提取了生长良好的苗期玉米株高、茎粗及叶倾角,但并未涉及叶片弯折等非正常生长状态的玉米。劳彩莲等[7]利用消费级深度相机获取1.0、1.4、1.9 m的塑料玉米植株模型点云,通过点云拼接实现了三维重建。由于深度相机根据飞行时间法测量物体的三维坐标值,因此对使用环境要求较高,在强光照或风扰动时成像效果较差。而且,由于玉米叶片较薄、存在褶皱及弯曲后产生遮挡,对玉米点云图的成像也会产生影响。此外,工业深度相机获取的点云数量庞大,后期处理花费时间较多,不利于玉米植株株高、节间高度及叶长的快速获取。综上,目前玉米植株水分胁迫检测存在操作复杂、损伤植物,以及因环境条件受限而导致准确率低、处理时间长等问题。
为了快速准确地检测玉米水分胁迫程度,本文提出基于多视角立体视觉的ECOC-SVM拔节期玉米水分胁迫预测方法,获取拔节期不同水分胁迫玉米样本的多视角RGB图像,利用SURF特征点检测及匹配恢复玉米植株的三维空间点,将多视角玉米点云进行数据融合,并提取出玉米点云骨架,基于该骨架准确检测玉米株高、叶长、节间高度等参数,并建立上述参数与玉米水分胁迫程度之间的预测模型,为玉米水分胁迫快速检测提供有效手段。
1 材料与方法
1.1 试验材料和设备
1.1.1供试品种
玉米品种为掖丰203(原福地203),甘肃省张掖市福地种业有限责任公司选育的玉米杂交种,生育期为96~125 d,具有出苗整齐、苗壮、抗病、抗倒伏能力强等特点。
1.1.2计算机软硬件
试验用计算机为Think Center M8600t-D138型,处理器为Intel Core i7-6700,主频为3.40 GHz,8 GB内存。主程序在Matlab下编写,子程序用C++语言编写后用Mex进行编译。
1.1.3仪器设备
图像拍摄系统由佳能70D型相机、18~200 mm镜头、云腾690型三脚架、带30°均分刻线的水平旋转平台及3 m×3 m黑色吸光布组成。土壤含水率用顺科达TR-6型土壤温湿度计测量,其测量范围为0~100%,测量精度为±2%;采用金选T-02A型电子秤称量土壤,精度为0.01 kg。种植玉米所用盆钵直径48 cm、高35 cm,玉米株高、节间高度及叶片长度采用卷尺及软尺测量,其测量精度为1 mm。采用艾沃斯数字温湿度计和数字照度仪测量玉米生长环境温度、相对湿度和光照强度,其精度分别为±1℃、±5%、±1 lx。
1.2 试验方法
1.2.1水分控制
试验用土为西北农林科技大学农作一站试验田耕层土,田间最大持水量为38.9%,基肥用量为每千克干土折合纯N 0.15 g、P2O50.10 g和K2O 0.15 g[8]。水分胁迫试验共分为3组:中度胁迫、轻度胁迫及正常对照组,其土壤含水率分别为15%、25%、35%[9]。玉米拔节期水分控制通过土壤含水率公式推导每日所需施水量[10],种植玉米前,通过电子秤称量可得空盆钵质量m0及装土盆质量m1,土壤湿度计测定3次土壤湿度取平均值,每盆盆钵中土壤干质量mDW为
mDW=(m1-m0)/(1+Ra)
(1)
式中Ra——土壤实际平均含水率,%
种植玉米后,每天使用土壤湿度计测量3次土壤实际含水率取平均值,计算每盆盆钵所需施水量
W=mDW(Rg-Ra)
(2)
式中Rg——土壤目标含水率,%
根据计算得出的施水量判断玉米植株是否需要补充水分。
1.2.2玉米种植方法
于西北农林科技大学农作一站玻璃温室内盆栽种植玉米,5月9日—6月17日每天16:00记录玉米生长环境,玉米生长期间日最高温度为38.9℃,最低温度为28.6℃,平均温度35.8℃;空气相对湿度最高为39.8%,最低为35.3%,平均相对湿度为37.2%;光照强度最高为11 906 lx,最低为6 046 lx,平均为8 932 lx。种植前对温室进行消毒灭菌处理,每盆各播种3粒已催芽种子;玉米长至3叶期,进行间苗处理,每盆仅留下1株长势均匀的玉米,间苗处理后共24株玉米;待玉米全展叶为5叶时,分3组进行不同土壤含水率控制,每组各8株,继续土壤水分控制7 d后采集玉米图像。
1.2.3玉米多视角图像采集系统
图1为玉米多视角图像采集系统,图中红色圆点为间隔30°的标记,相机放置在与玉米叶片展开面垂直的位置,距离水平旋转平台中心230 cm处,相机等效拍摄位置为水平旋转平台旋转后,相机拍摄的玉米植株视角位置,从图中可见通过旋转水平圆盘拍摄玉米图像的3个视角。图像采集时将玉米植株放置在可水平旋转的旋转平台上,旋转轴中心与相机光轴中心在同一垂直平面上且固定不变。规定玉米叶片展开平面为0°方向,每株玉米拍摄-30°、0°和30° 共3幅图像。采集时间为玉米全展叶5叶期至拔节期结束,每2 d采集一次,共采集16次数据。每株玉米共采集48幅图像,3种水分胁迫共采集1 152幅图像。
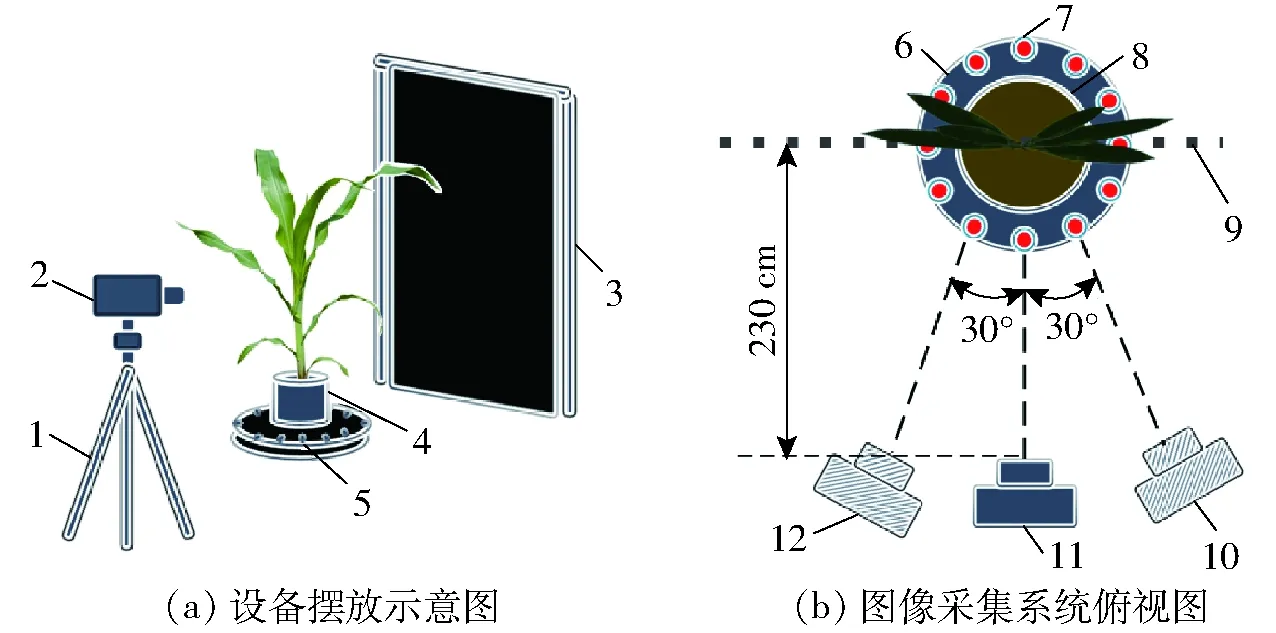
图1 玉米多视角图像采集系统Fig.1 Multi-view image acquisition system of maize1.三脚架 2.相机 3.幕布 4.盆钵 5.间隔30°标记水平旋转平台 6.水平旋转平台 7.30°标记 8.花盆 9.玉米叶片展开平面 10、12.相机等效位置 11.相机实际摆放位置
单株玉米采集图像如图2所示,由图可见,间隔30°拍摄玉米图像,相邻两幅图像变化不大,便于后期特征点的检测及匹配;每株玉米3幅图像可以体现出玉米由于弯曲而造成的遮挡部分,为后期准确建立玉米植株点云模型奠定了基础。

图2 3个角度拍摄的玉米植株图像Fig.2 Maize images taken at three angles
在拍摄玉米图像的同时,人工测量叶长、节间高度及玉米株高。叶长为采用软尺沿着叶茎测量从叶基部至叶尖的距离;节间高度为采用直尺测量相邻叶基部中间的直线距离;玉米株高为叶片最高位置到第6叶片叶基位置的垂直高度。
2 基于多视角图像的玉米参数提取方法
2.1 相机内外部参数标定
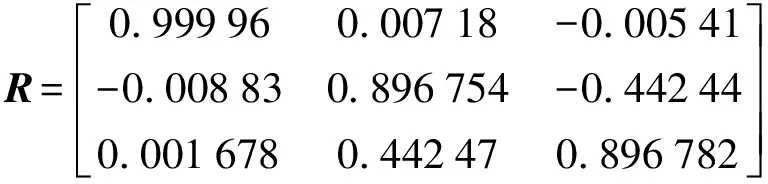
为了获取相机几何成像模型内外部参数,利用Matlab软件Stereo Camera Calibrator工具箱,采用张正友标定法对相机进行标定[11-12]。标定图像共45组,每组2幅图像,将尺寸为600 mm×450 mm的棋盘格标定板固定位置拍摄1幅图像后,保证标定板相对位置不变将标定板旋转30°再次拍摄1幅图像,2幅图像可等效为双目立体视觉的左、右摄像机拍摄,再次改变标定板位置重复上述过程进行拍摄标定图像。经标定可得相机内部参数矩阵K、平移矩阵T及旋转矩阵R为

(3)

(4)
(5)
经过参数标定可得误差为2.08像素;几何标定系数(标定板距相机2.30 m时,5 cm长度需117.86像素表示)为0.42 mm/像素,计算可知真实值误差为0.87 mm,符合精度要求。
2.2 玉米植株图像边缘提取
为了减少由于玉米叶片过薄对特征点检测及匹配效果的影响,图像预处理过程如图3所示。处理流程为:①采用HSV模型,经试验设置归一化的H分量范围为(0.16,0.56)、S分量范围为(0.16,1)、V分量范围为(0.18,1),如图3b所示。②计算剩余区域连通域面积,将连通域按照面积大小排序,并删除除最大面积外的剩余连通域,得到图3c。③膨胀处理,用一个沿水平和垂直轴扩展5个像素平坦的圆盘型结构元素对玉米植株进行膨胀处理,以消除叶片上的空洞,且使叶片轮廓线更加平滑,如图3d所示。④玉米植株边缘检测,用内核尺寸为3、边界模式为BORDER_DEFAULT的Scharr滤波器检测,得到玉米植株边缘线如图3e所示。
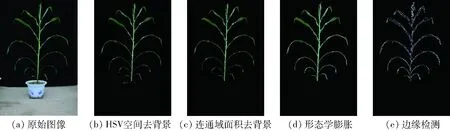
图3 玉米图像边缘检测过程Fig.3 Edge detection process of maize image
2.3 玉米植株点云模型建立
2.3.1基于SURF算法的立体视觉三维重建
特征点检测与匹配的关键是找出投影到2幅不同视角的玉米叶片边缘像素点的对应关系,特征点匹配的效果直接影响到后续玉米植株参数的测量[13-15]。考虑到基于SURF算法的特征点匹配具有计算复杂度低、耗时短等优点,故采用该方法进行匹配,步骤如下[16-18]:①构建Hessian矩阵。②构建尺度空间。③特征点定位。④确定特征点主方向。⑤生成特征点描述子。由于玉米叶片薄并且整株玉米在提取边缘信息后纹理特征相近,利用SURF算法生成特征描述子后,结合快速最近邻逼近搜索函数库(Fast library for approximate nearest neighbors, FLANN)进行特征匹配,会产生较多的误匹配。根据文献[19]提出的特征点检测和匹配结果的评价准则,本文特征点匹配召回率为0.23,准确率为42.96%,F1值为29.97%。为进一步提高匹配准确率,采用随机样本一致性(Random sample consensus, RANSAC)方法减少错误匹配,即减少将非对应特征点检测为匹配成功的情况。在删除错误匹配后,特征点匹配准确率提高到98.95%,F1值为37.32%,虽然检测到的正确匹配点对数较少,但是较高的特征点匹配准确率可以保证重建的玉米点云模型的准确性。图4为图2中-30°和0°玉米图像经预处理后匹配效果图,该结果表明,本文方法可有效将玉米植株叶片进行特征点检测及匹配,为下文通过匹配特征点及立体视觉原理恢复玉米点云模型奠定基础。
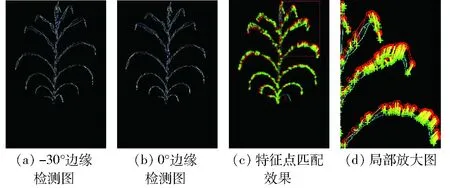
图4 SURF特征点检测匹配图Fig.4 Match plots of SURF feature point detection
将特征点匹配成功的点对,根据双目视觉原理恢复出该特征点的三维坐标[20-22],由图4c中匹配成功的特征点根据坐标系之间的关系,可以恢复出玉米植株三维坐标点云图,如图5a所示,采用同样的方法处理玉米30°视角拍摄的玉米植株,可以恢复出0°~30°视角的玉米植株的三维坐标点云图,如图5b所示。由图5可见本文方法重建的玉米点云模型很好地表现出玉米叶片的形态特征,为后续提取点云骨架奠定了良好的基础。

图5 玉米植株点云图Fig.5 Maize point cloud maps
2.3.2基于Kd-tree的ICP点云配准
由图5可知,由于玉米叶片薄并且弯曲,单一方向的玉米点云会出现断痕的情况,不利于后期玉米点云骨架的提取,并影响玉米植株叶长、节间高度的提取,因此需要将不同角度的玉米点云进行配准,从而进行点云数据的融合。ICP算法具有原理简单、适应性广和精度高等优点[23-27],故采用PCL(Point cloud library)点云库中的ICP算法进行配准。设置ICP算法迭代终止条件为最大迭代次数为160次或前后两次误差小于0.01 mm。将图5a中玉米点云设置为原始点云,图5b中点云设置为目标点云,其配准效果如图6所示,经过86次迭代时达到迭代终止条件,经ICP点云配准后点云数目平均增长率为53.7%,配准误差小于迭代终止条件(0.01 mm)。
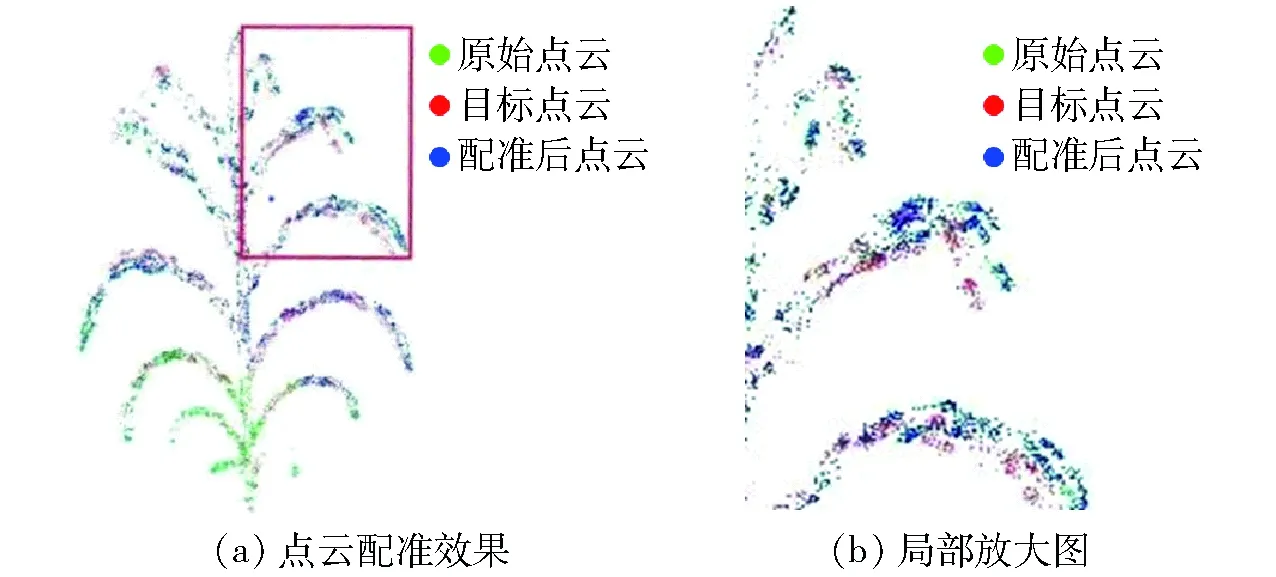
图6 玉米点云ICP配准图Fig.6 Maize point cloud ICP registration maps
2.4 玉米植株参数提取
2.4.1基于L1-中值算法的玉米点云骨架提取
为建立玉米水分胁迫预测模型,准确提取出玉米叶长、节间高度及株高,需先提取玉米点云骨架,根据骨架再计算出玉米叶长、节间高度及株高参数。考虑到L1-中值骨架构建算法可以直接应用于具有显著噪声、异常值和大面积缺失的稀疏点云数据[28],可以有效弥补由于玉米叶片弯曲或相互遮挡而造成的点云缺失、分层等问题,故采用该算法,其核心是采样点迭代收缩为一个迭代求解过程[29-31]。设输入的散乱点云为Q,下采样的点云为X。
(1)玉米点云随机下采样。点云下采样的作用是通过把采样点收缩为骨架点,从而指导骨架的建立,采样点数越少,计算量越少。本文采用洗牌算法进行下采样[32],经试验观察设置采样点数为1 000时骨架提取效果较好。
(2)采样点迭代收缩并提取骨架。当采用同一个邻域半径进行收缩时,采样邻域半径对收缩结果影响较大,故本文采用自适应邻域法,先用较小的邻域半径,之后不断扩大邻域半径直至迭代结束。初始较小的邻域半径h0计算式为
(6)
式中dbb——玉米点云包围盒对角线长度,mm
J——玉米点云Q的点数目,个
邻域半径的增长速率为Δh=h0/2。设置邻域半径增长条件为:①2次迭代之间平均移动距离小于0.000 05倍玉米点云包围盒。②在该邻域半径下迭代次数超过50次。玉米采样点集X经多次迭代收缩后,骨架点会逐渐形成较明显的曲线骨架分布,将这些骨架点连接可以形成一条骨架分支;对仍未形成骨架分支的少数采样点,则做删除处理。玉米点云骨架迭代过程如图7所示。迭代20次时每次迭代移动距离缩小为0.072 mm,表明采用该算法可以使用较少迭代次数得到较好的骨架。
(3)点云骨架增强。为使玉米点云骨架更接近真实形状,需要对获得的点云骨架进行平滑及中心化[33]。本文用移动最小二乘法(Moving least squares,MLS)算法进行点云重采样实现点云平滑,利用PCL库实现算法,设置拟合2阶多项式,Kd-tree作为搜索方法,拟合的邻域半径为0.05 mm。在骨架收缩过程中,由于玉米输入点集存在部分面积缺失,从而导致提取骨架偏离玉米点云中轴位置。针对该问题,采用局部椭圆拟合方法,自动调整偏离中心的骨架,将点云骨架点移动到椭圆中心。骨架提取效果如图8所示,可正确体现玉米植株形态。
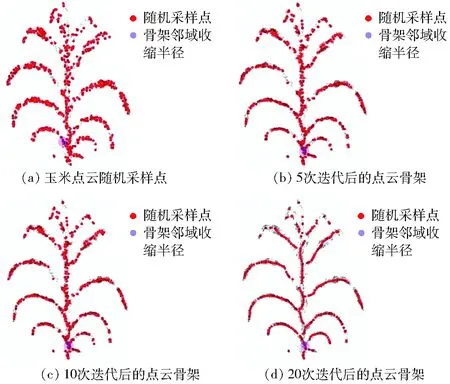
图7 玉米点云骨架迭代过程Fig.7 Maize point cloud skeleton iteration process
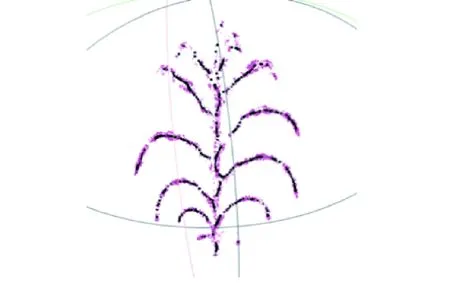
图8 玉米植株原始点云及提取骨架Fig.8 Maize point cloud and extraction skeleton of maize
2.4.2基于点云骨架的玉米参数提取
得到玉米植株骨架模型后,便可对玉米叶长、节间高度及株高进行提取[34]。玉米叶片骨架叶基部与玉米茎秆骨架交点为骨架连接点,提取参数为玉米受到水分胁迫后全展叶长、节间高度及株高,图9为玉米参数提取示意图。

图9 玉米参数提取示意图Fig.9 Schematic of maize parameter extraction
(1)叶长
叶长为玉米骨架连接点至玉米叶片骨架尖端欧氏距离之和,提取方法为:①调用VLfeat库计算玉米骨架表面法向量,根据玉米叶片和茎秆表面法向量之间的差异,剔除玉米茎秆骨架。②删除玉米前5片全展叶骨架。③寻找玉米叶片骨架z坐标最小点,设该点为p11(x11,y11,z11),并将该点划分为叶片Y1中。④计算p11到剩余点的欧氏距离d,计算式为
(7)
将距离p11最近的点记为p12,p11和p12之间的距离记为dmin,设置阈值为dTh=5dmin。⑤叶片Y1长度更新为p11与p12之间的欧氏距离。⑥以p12为起始点重复步骤④及步骤⑤,直至计算距离d>dTh,则将该点划分为叶片Y2中。⑦重复计算,直至所有点被划分到所属叶片Yi中,并计算出每片叶子长度。
(2)节间高度
节间高度为每个叶片骨架起始点之间的直线距离,即p11与p21之间的欧氏距离为玉米植株第1节节间高度,依此类推可求得玉米植株的节间高度。
(3)株高
玉米株高为玉米植株最高点与玉米第6片叶叶基部的垂直高度距离,提取方法为寻找玉米点云骨架z坐标最大的点,设该点为pTOP(xTOP,yTOP,zTOP),则玉米株高L=zTOP-z11。玉米株高每日增长量为相邻两天玉米株高之差。
3 试验结果及分析
3.1 重建效果分析
分别用本文特征点检测方法、BRISK算法、MSER算法、FAST算法、Harris算法、MinEigen算法,对图4a、4b进行特征点检测,特征点检测及匹配结果如图10所示,不同算法的特征点检测数量及成功匹配对数如表1所示。
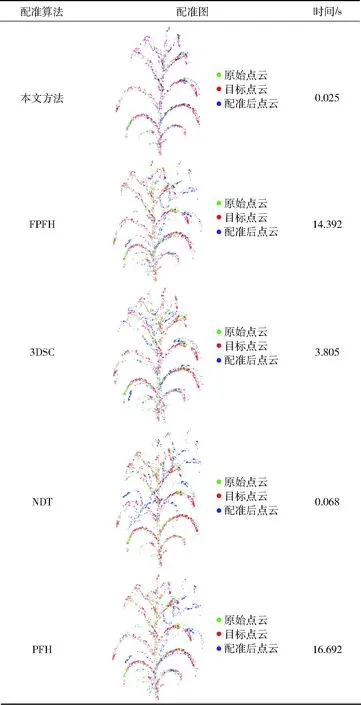
由图10及表1可见,本文特征点检测及匹配算法对于玉米叶片有较高的匹配精度,可有效检测出玉米叶片尖部且成功匹配特征点数目最多,因此本文特征点检测方法较好。基于本文算法对特征点匹配后,利用双目立体视觉原理恢复出该视角下的玉米点云植株,分别采用本文方法、FPFH配准方法、3DSC配准方法、NDT配准方法、PFH配准方法将2个视角的玉米点云植株模型配准到同一坐标轴下,配准结果及配准所需时间如表2所示。由表2可知,本文方法在配准精度及配准时间上均优于其他配准方法。
3.2 玉米植株参数测定精度分析
为验证本文方法参数测量的准确性,进行了基于点云骨架提取的玉米株型参数和人工测量值比较试验。人工测量值和提取值之间吻合情况如图11所示,株高、节间高度与叶片长度的决定系数R2分别为0.994 5、0.993 8和0.995 1,RMSE分别为1.82、0.42、0.84 cm,具有较高的测定精度。
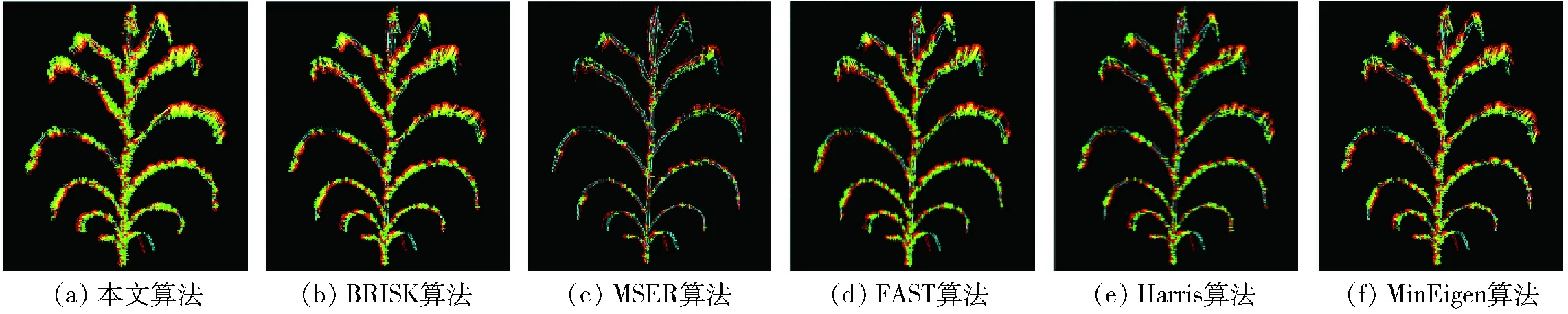
图10 不同算法重建玉米植株效果对比图Fig.10 Comparisons of effects of rebuilding maize in different ways

表1 不同特征点检测算法准确率Tab.1 Accuracy of different feature point detection algorithms
表2 点云配准结果及配准用时
Tab.2 Point cloud registration results and registration time
3.3 玉米水分胁迫预测模型
3.3.1基于单一参数的玉米水分胁迫预测模型
(1)基于玉米节间高度的水分胁迫预测模型。试验可知,与土壤含水率35%相比,土壤含水率25%平均节间高度降低33.5%,土壤含水率15%平均节间高度降低了76.7%。表明水分胁迫对玉米节间高度有较大影响,因此可以利用玉米植株节间高度预测水分胁迫情况。采用线性拟合方法构建基于节间高度的玉米水分胁迫预测模型,如图12所示。其决定系数R2为0.994 9,具有较高的相关性,可用于水分胁迫的预测。
(2)基于玉米株高每日增长量的水分胁迫预测模型。当土壤含水率高时,玉米植株体内水分充盈,细胞伸长率高,表现为玉米株高增加快,玉米处于拔节期时每天生长高度明显,因此可用玉米株高每日增长量来判断土壤含水率。以玉米株高每日增长量为自变量,土壤含水率为因变量建立玉米水分胁迫模型,如图13所示,回归方程决定系数R2为0.843 3,具有较强的相关性。
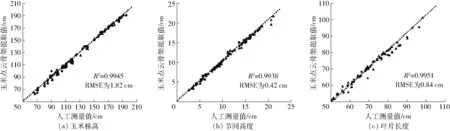
图11 玉米植株参数测定值和人工测量值间的相关性Fig.11 Correlation between parameter determination of maize and artificial measurement
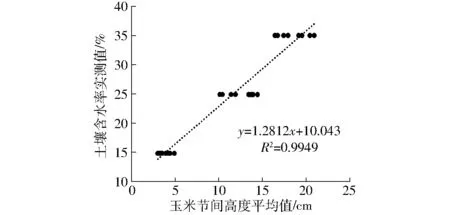
图12 基于节间高度的玉米水分胁迫预测模型Fig.12 Maize moisture stress prediction model based on inter-sectional height
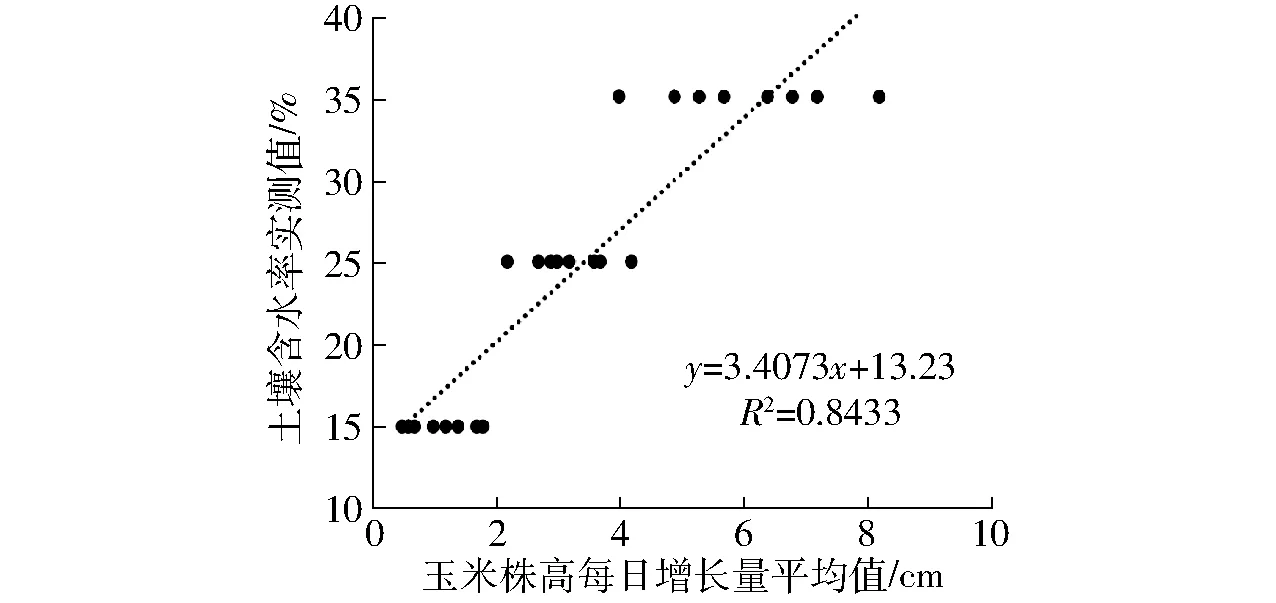
图13 基于株高每日增长量的玉米水分胁迫预测模型Fig.13 Maize moisture stress prediction model based on high daily growth of corn strains
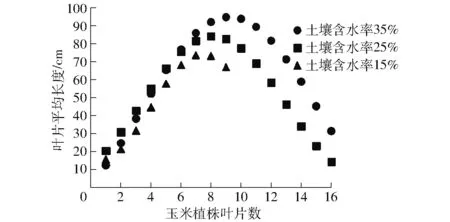
图14 玉米叶片长度平均值Fig.14 Average length of maize leaves
(3)基于玉米全展叶叶长的水分胁迫预测模型。玉米叶片长度为全展叶长度,在玉米拔节期间长度基本无变化,故分别测量同一水分处理下的玉米不同叶片长度的平均值(图14)。由图14可知,玉米前6片叶子未遭受水分胁迫,故长度无明显差异。从第7片叶片开始,土壤含水率35%的玉米叶片长度均大于土壤含水率25%和15%下的玉米叶片长度,因此玉米叶片长度可以反映土壤含水率情况。
以第7、9、11、13片叶子为例,以叶片长度为自变量,土壤含水率为因变量,建立玉米水分胁迫预测模型,如图15所示。由图可知,玉米叶片长度与土壤含水率具有较高的相关性,决定系数平均值为0.828 1,具有较强的相关性。
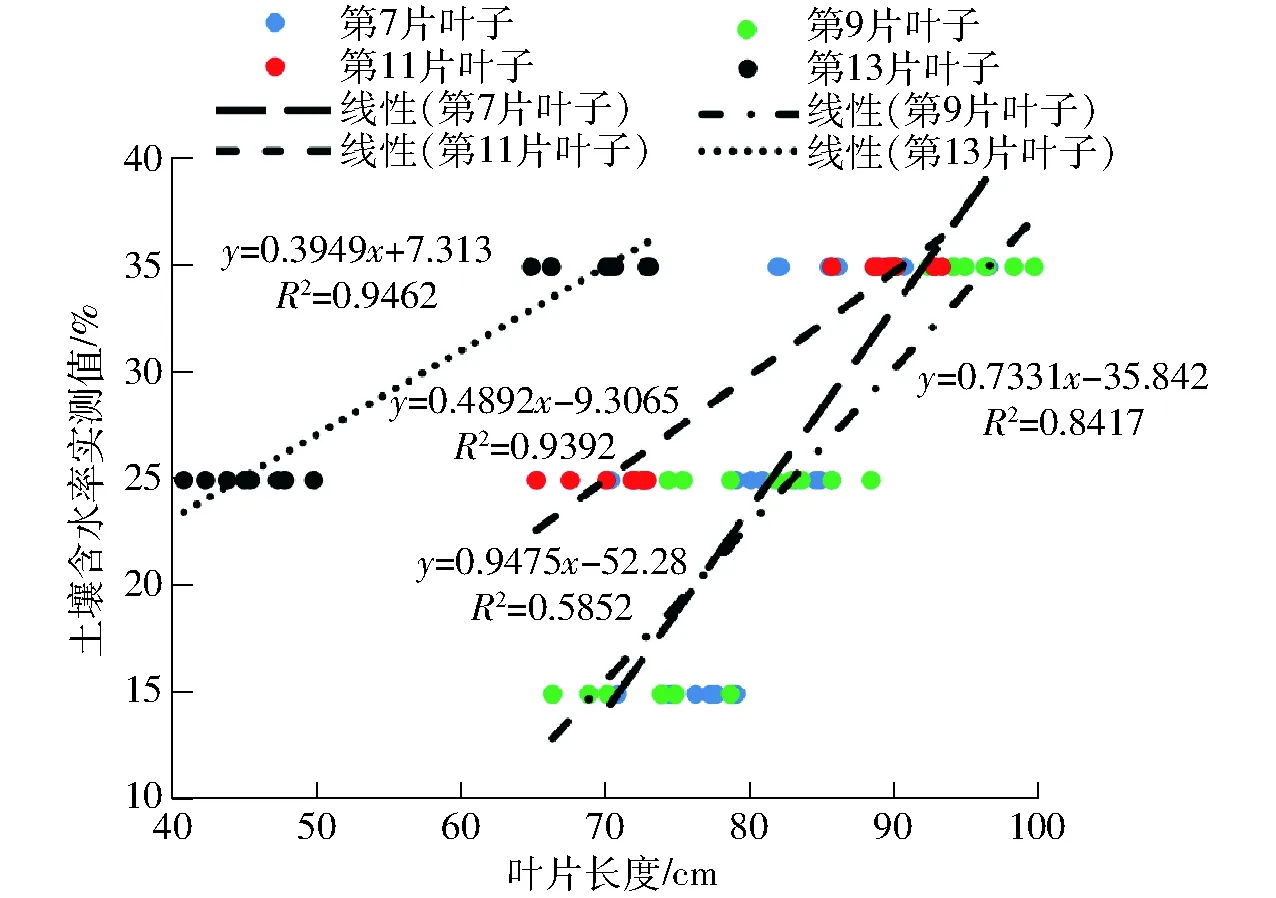
图15 基于玉米叶长的玉米水分胁迫预测模型Fig.15 Prediction model of maize moisture stress based on length of corn leaves
(4)单一参数土壤含水率预测值预测精度分析。为验证单一参数建立的玉米水分胁迫预测模型精度,进行了土壤含水率预测值预测精度分析。每株玉米随机选取节间高度、株高每日增长量各1组,以及第7、9、11、13全展叶叶长,通过单一玉米参数水分胁迫预测模型计算出土壤含水率预测值,土壤含水率预测值与实测值吻合情况如图16所示,基于节间高度、株高每日增长量、全展叶叶长的土壤含水率预测的决定系数R2分别为0.892 2、0.892 8和0.817 6,RMSE分别为2.92%、2.53%和2.76%,具有一定的预测准确度,但基于单一参数的预测值之间存在较大差异。
3.3.2基于多参数的玉米水分胁迫预测模型
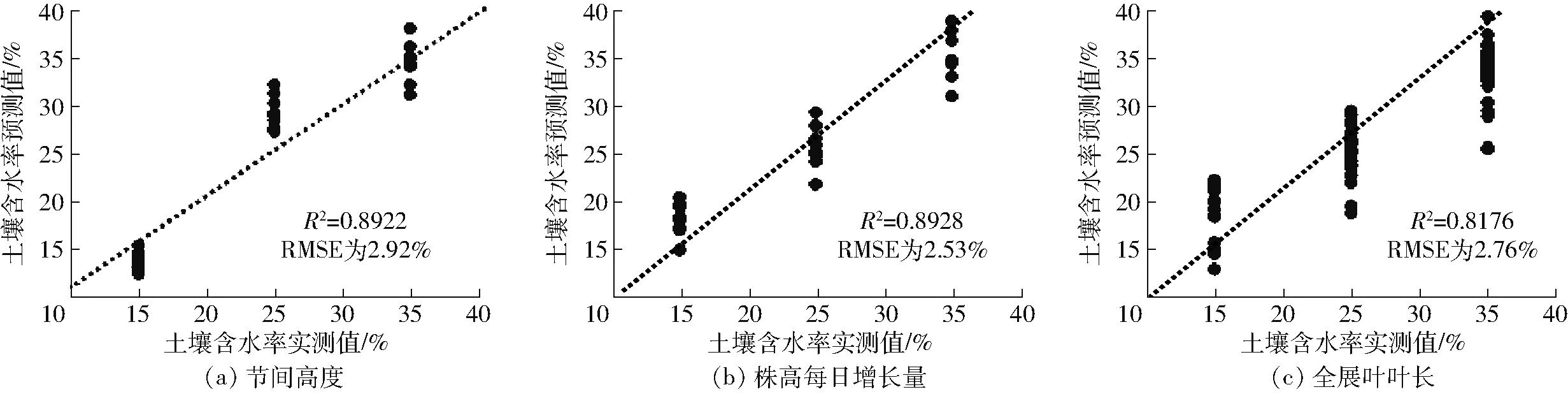
图16 土壤含水率预测值与实测值间的相关性Fig.16 Correlation between soil moisture prediction and real values
为了准确将玉米受到水分胁迫情况划分为轻度胁迫组(土壤含水率25%)、中度胁迫组(土壤含水率15%)、无水分胁迫组(土壤含水率35%),建立基于ECOC-SVM的多参数的玉米水分胁迫预测模型[35]。模型构建步骤如下:①构建数据集,以6月3日至6月17日采集的8 d数据为样本,每种水分处理下有8株玉米,共64个样本,删除数据最大值2组和最小值2组,即每种水分处理下共选取60个样本,3种水分处理共180个样本。将180个样本中的135个(75%)作为训练集,剩余45个(25%)作为测试集。②选择特征参数,考虑到15%土壤含水率种植的玉米叶片最大数为9,因此以叶片长度差异明显的第7、8、9片叶长、节间高度及株高每日增长量为特征向量,其中7、8、9片叶长为每日数据采集测量值,节间高度为当日测量时玉米植株最新完全长出的节间高度值,株高每日增长量为当日数据测量值与前一次测量值之差。③ECOC-SVM模型采用线性核函数,并利用交叉验证选择(K-fold cross validation, K-CV)方法优化核函数参数。④设置网络训练终止条件的误差为0.000 1。
用训练集对ECOC-SVM进行训练得到分类模型,用测试集对训练好的模型进行检验,测试集分类结果如图17所示。由图可知,45个测试集正确分类的个数为42个,该模型的准确率为93.33%,误差为6.67%。上述结果表明,用玉米叶长、节间高度及株高每日增长量3个参数建立ECOC-SVM模型预测水分胁迫程度的准确率较高,弥补了使用单一参数预测模型判断玉米水分胁迫情况存在差异的问题。
在玉米处于拔节期时,只需知道玉米节间高度、株高每日增长量及全展叶叶长,根据多参数玉米水分胁迫模型可以判断玉米受到水分胁迫程度,以指导大田玉米灌溉,为精细农业提供技术支持。
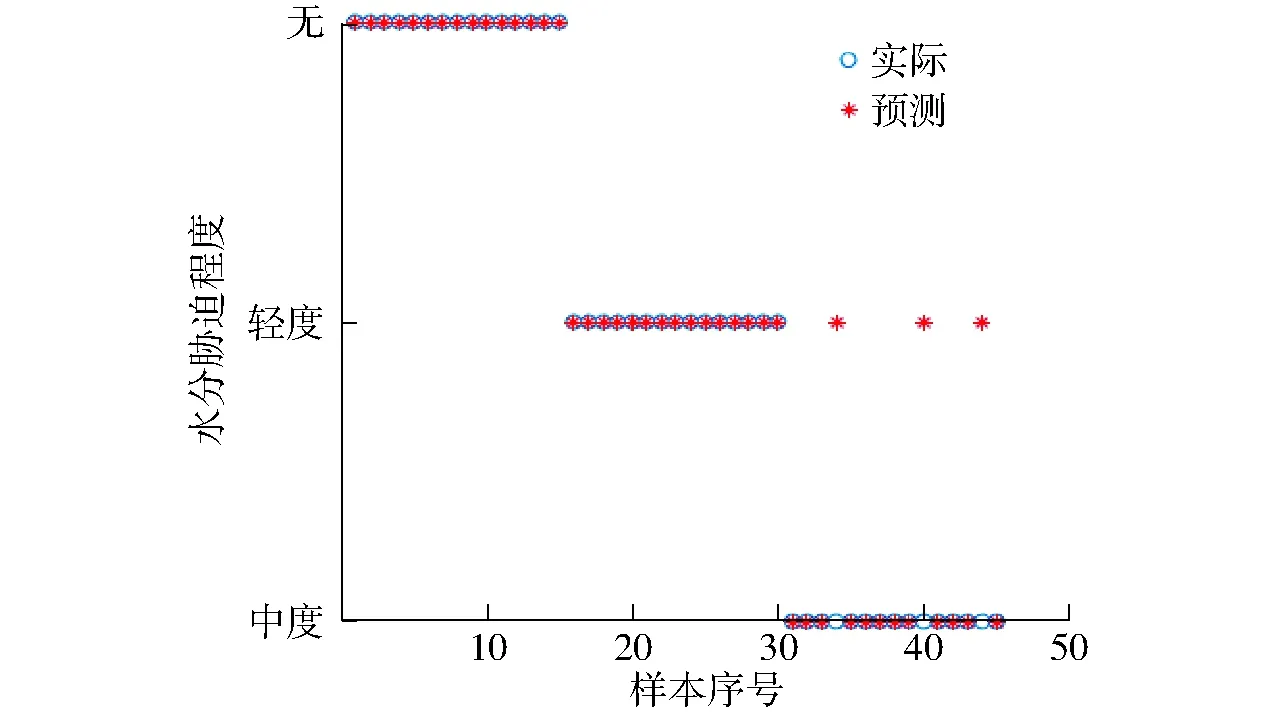
图17 测试集分类结果Fig.17 Test set classification result graph
4 结论
(1)采用非接触的方式提取玉米株型参数,建立了基于ECOC-SVM的玉米水分胁迫预测模型,该模型测试集预测准确率为93.33%,具有较高的准确性,可较好地预测玉米植株受到的水分胁迫程度。
(2)通过拍摄的3幅图像进行玉米点云的重建,减少了传统基于RGB图像重建方法需要序列图像的数量,从而极大提高了提取参数的速度。
(3)本试验在温室中采用盆栽方式模拟进行,在大田试验中需考虑风速等实际情况,需进一步研究改进。
猜你喜欢
中南林业科技大学学报(2022年7期)2022-09-26
电子乐园·上旬刊(2022年5期)2022-04-09
农业科技与信息(2021年24期)2022-01-05
中国新技术新产品(2020年5期)2020-05-06
农村百事通(2019年17期)2019-10-08
农业工程技术·温室园艺(2017年3期)2017-07-13
现代农业科技(2017年1期)2017-03-06
江苏农业科学(2016年8期)2017-02-15
江苏农业科学(2016年8期)2017-02-15
汽车零部件(2016年6期)2016-07-18