
基于越疆魔术师机械臂的流水线设计与应用
2020-08-11 09:19王瑞娟胡文杰
科学技术创新 2020年25期
李 超 陈 佳 王瑞娟 胡文杰*
(咸阳职业技术学院,陕西 咸阳712000)
在工业机器人的智能化程度越来越高的情况下,利用人工智能的方式来解决工业生产的效率,是全球都亟待解决的一个问题。随着生产方式自动化的不断提高,应用高智能的工业机器人来完成一些大型的,重复程度比较多的工业生产,应该是目前社会上的主流趋势。
该机械臂是由越疆公司研发的多功能轻小型的智能机械臂,其最大的优点在于智能化程度比较高,可塑性较强而且精度比较高,能够完成比较精密的工作,而且在完成大规模集成化的生产时有着独特的优势。该机械臂还可应用于家庭生活、学校实训等多个方面。充分体现了该机械臂功能的强大和用途的广泛。
就现状来说,全球的人工智能市场还处于一个较大的发展时期,智能化的产品还没有形成一定的市场影响力,在解决工业生产的高智能自动化问题方面还存在一定的瓶颈,该课题最终目的就是要解决这一问题,弥补这个市场缺口,解放劳动力,依托多机械臂和其它辅助配件的共同使用来改进目前工厂的流水线生产,提高工业生产的效率和利润。
1 系统概况
流水线搬运机械臂是由编程脚本编程控制、位置检测和气动技术于一体的完整的综合的控制系统。这套系统包括软件部分、电气部分和机械驱动部分。机械驱动部分采用机械臂臂身、滑杆、吸盘等;电气部分包括步进电机、步进电机驱动器、直流电机、光电传感器、颜色传感器你、电磁阀等。
系统工作原理如下:按下启动按钮后,传送带运行,机械臂A 运行至工件堆放区,机械臂A 开始下降,夹取工件后门型运动至传送带上方,松开夹钳放置工件,放置完毕0.5S 后机械臂A 开始上升归位至初始设定位置待命。传送带运直到光电传感器检测到工件停止,同时机械臂B 开始下降。下降到位后机械钳夹紧工件,0.5S 后开始上升,而机械夹钳保持夹紧。门型运动至颜色传感器上方,颜色传感器打开识别颜色后关闭,机械臂门型运动至指定颜色分类区域进行放置归类,放置完毕机械臂B 门型运动至初始位置进行待命,传送带开始继续运行,如此循环。机械臂配合传送带完成一个周期的工作,完成工件采集、运送以及分类放置或者堆叠。
为了流水线搬运机械手臂动作的准确确定位置,系统采用二相八拍混合式步进电机。该电机具有较高的启动频率和运行频率,而且体积小、耗能低。在该机械臂的机械手基座上还设置有一个旋转编码盘,该编码盘的作用是:产生一个方波信号,设定每旋2°编码盘发出一个脉冲信号,发送给DobotStudio 软件平台环境,用于定位控制,能够达到精准的运行和操控。为了机械臂运行的安全性和准确性,机械臂安装了下限和上限滚轴式行程开关,该开关的作用是:在基座上设有左转和右转电感式开关,由光电传感器开关构成的工件检测系统负责检测传送带A 上的工件是否移动到指定位置,运动到指定位置后机械手开的始动作。此外,步进电机固有的特点使它运行在某个频率上会产生共振,在编写脉冲信号输出时,设定的频率值除细分数后避免在200-250 之间,至此完成一整套的机械臂搬运工作。该项目主要的模块化技术流程图如图1 所示:
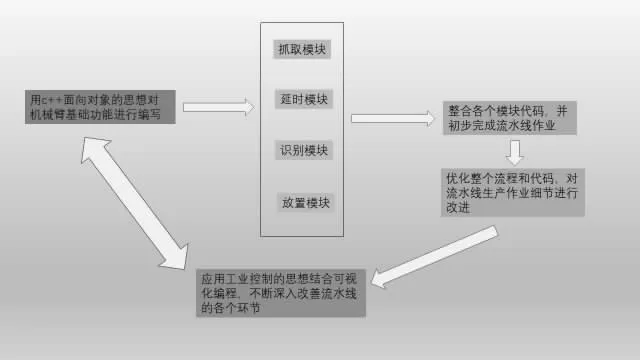
图1 模块化技术流程图
2 系统硬件基础
根据流水线搬运机械手的控制要求,考虑到I/O 点数通常留有10%-15%的裕量,我们采用越疆DobotStudio 软件平台环境。这个平台可以完全满足自动化控制需要,具有完善指令控制系统,功能齐全的控制方式、丰富的可扩展编程模块等等。此外,性价比高也是此系统采用它的重要原因。该系统采用以c++为底层编程做为基础,它可以直接通过python 指令化编程或模块化编程的方式驱动步进电机实现不同的功能需求,以控制机械手的位移和运动速度,来控制机械臂完成不同的工作。
系统的输入信号由两部分组成,分别是可视化代码和积木化编程和电感式接近开关、光电开关、和滚轴式行程开关等,这些传感器信号和按钮信号作为机械臂的输入变量,经过机械臂的输入接口端输入到内部储存数据的寄存器上暂存,然后在机械臂内部CPU 进行逻辑运算或者数据处理后,以输出变量的形式送到输出接口端,从而能够驱动机械臂上的电机控制机械手的上下升降和左右旋转等动作,让机械臂能够进行精准的门型运动。在现场工作期间,可通过计算机上的软件对其动态控制,并可及时地根据具体环境的控制要求对其坐标和点位进行修改和调整。
在数控系统中要求点位要非常准确控制时,就要通常用步进电机作为驱动电机,因为该电机体积小,耗能低,而且准确性和可靠性高。步进电机驱动器的功能是把PLC 控制系统发出的电脉冲信号转化为步进电机的角位移,从而对机械手进行预定的整个轨迹的控制。该系统驱动器信号端用的是12V 电压供电,输入端信号为低电平有效。下面是系统机械臂的I/o 分配表1:
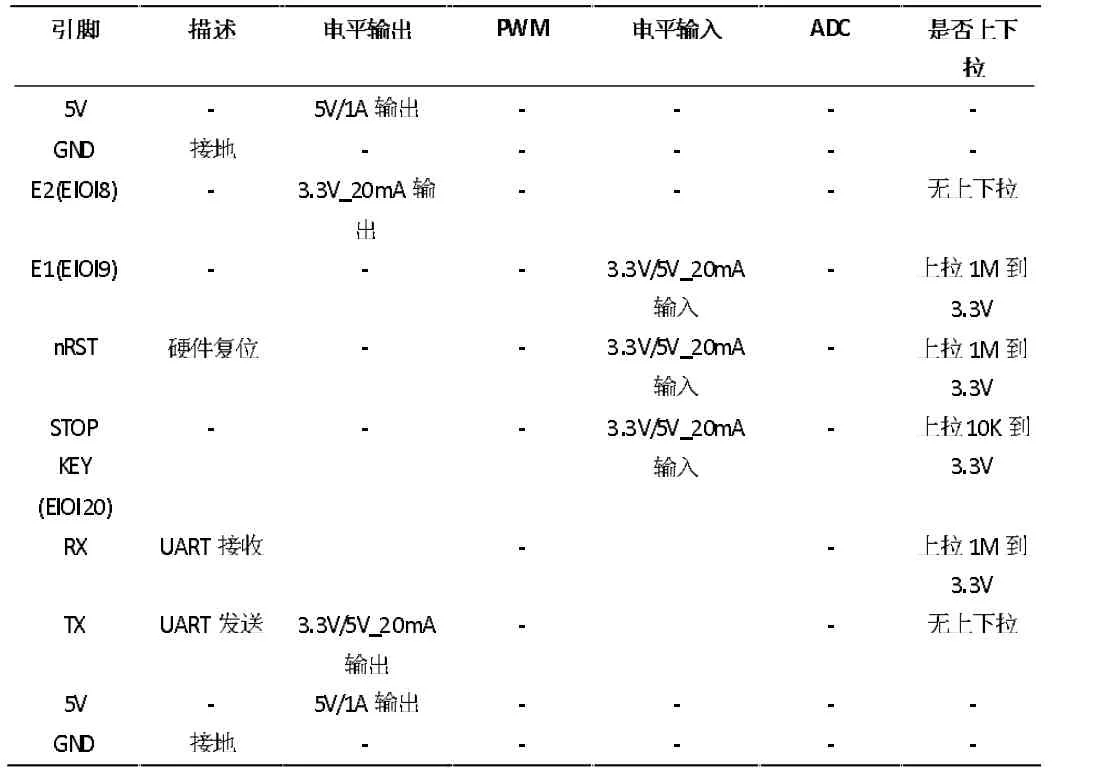
表1 系统机械臂的I/o 分配表
3 系统软件基础
流水线搬运机械臂的操作方式有两种,分别是手动操作和自动操作。自动操作又分为步进操作方式、单周期操作方式和多周期操作方式。其中连续多周期操作方式为最常用的工作方式,采用以c++为底层的编程系统对机械臂进行精确的自动控制以完成预期的工作任务。这套编程系统采用可视化编程系统。可视化编程,就是可视化程序设计:也就是我们常说的所见即所得,这种编程方式,简洁、高效。我们力图实现编程工作的可视化的目的,就是随时可以看到结果,程序和结果的调整同步,大大提高开发效率。可视化编程是与传统的编程方式相比而言的,这里的“可视”,指的是无须编程,仅通过鼠标点击,和类似搭积木的方式在可视化界面完成的设计工作,是目前最好的Windows 系统上的应用程序开发工具。
系统搬运模块与传送带程序结构如图2 所示。
系统识别识别模块与放置模块的程序结构图如图3 所示。
4 机械臂的实践运用
越疆机械臂是一款多功能高精度轻量型智能实训机械臂,是一站式STEAM 教育综合平台,具备3D 打印、激光雕刻、写字画画等多种功能,预留13 个拓展接口支持二次开发,用户可以通过软件编程结合硬件拓展来开发更多的应用场景。
而我们所研究和运用的主要是应用在工厂流水线生产过程中,可替代人力做重复搬运的工作,类似于传统流水线生产搬运,消耗人力,效率低下,对于一些重复程度较高的生产,使用机械臂流水线搬运,可大大提高工厂自动化水平,降低人力成本,可帮助工厂快速搭建起生产线,市场前景广阔。
该机械臂在能够完成流水线生产搬运的同时,结合其他辅助配件还可以完成3D 打印,定点抓取与放置,写毛笔字等一些高精密性工作。而市场上对该机械臂的实践和应用大多也集中在这一方面。例如:
a.2017 年1 月,越疆机械臂携手阿里云ET 挥毫泼墨写春联,展示现代科技与传统文化的融合。2017 年5 月,越疆机械臂作为唯一的中国科技产品亮相2017 年Google I/O 开发者大会。
b.还有在2017 年10 月,上海交通大学工程训练中心电子电工实验室采用越疆机械臂进行实践教学,进行机械、自动化等相关课题研究。11 月,西安交通大学设计系学生用于实验室课题研究-智能工厂,该课程设计的目的是为了实现工厂自动化、智能化的生产与管理。
c.2017 年12 月,悉尼科技大学工业机器人与基础算法项目向学生展示了如何操控机械臂以及并了解机械臂可执行的操作任务。
而就工厂自动化生产这个方向来说,该机械臂有着绝对的优势,我们曾经做过的一些小的实验,利用机械臂的传感器系统建立一个图像坐标系与机器人坐标系,并对传感器识别到的外界物体进行预处理,提取物体特征并匹配特征模板来进行识别、分类,最后发送指令对机器人动作进行控制。比如,物体的定点抓取,精准放置,和颜色识别等。都是通过机械臂的改系统进行完成的。也主要应用到了可视化编程技术。通过考察工厂流水线的具体运作流程,对机械臂各个功能模块进行精确定位,最后完成智能化,自动化的工程流水线生产作业。该机械臂的3D 打印模块,通过配合3D 打印组件的使用,也可为工厂产品的制作提供有力的保障,配合流水线生产作业,完成工厂从生产到搬运再到分拣的工作,解决工程自动化程度的提升。解决目前市场上,传统流水线作业生产效率低下等问题。
通过以上该机械臂在人工智能领域的多方向应用和实践,不难看出,我们机械臂流水线自动化生产课题市场前景广阔,结合该机械臂的多种接口和多种配件组合使用,一定可以在市场上开创出属于智能化机械臂的新时代。

图2 系统搬运魔块与传送带的程序结构图
图3 系统识别模块与放置模块程序结构图
5 结论
流水线搬运机械臂具有高效的工作效率、准确的定位精度、超强的适应能力,实现了机械化和自动化的有效结合。该系统使生产效率提高了35%,运行稳定,可靠性高,维修方便,具有广泛的应用前景。当前,在解决工业生产的高智能自动化问题方面还存在一定的瓶颈,该课题最终目的就是要解决这一问题,弥补这个市场缺口,解放劳动力,依托机械臂好和其它辅助配件的共同使用来改进目前工厂的流水线生产,提高工业生产的利润和价值。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
智能制造(2021年4期)2021-11-04
中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
杭州电子科技大学学报(自然科学版)(2020年3期)2020-06-08
小学科学(学生版)(2020年2期)2020-03-03
电子制作(2019年19期)2019-11-23
永善文学(2017年1期)2017-07-18
中学教学参考·理科版(2016年11期)2017-06-08
