基于电磁弹射系统的永磁直线同步电机仿真研究
2020-09-10 03:23王钰琳兰志勇陈毅张江兵郑球辉
内燃机与配件 2020年24期
王钰琳 兰志勇 陈毅 张江兵 郑球辉
摘要:本论文研究一款应用于电磁弹射系统中的永磁同步直线电机,通过进行仿真分析,着重研究永磁直线同步电机矢量系统驱动控制,在Matlab/Simulink下建立了永磁直线同步电机的模型,对其进行封装,并在此基础上搭建基于矢量控制的双闭环、三闭环伺服系统的Matlab仿真模型,对其仿真结果进行验证,对电机性能进行分析。
Abstract: This paper is researched a permanent magnet linear synchronous motor, applied in electromagnetic aircraft launch system, by taking the simulation analysis, researched the permanent magnet linear synchronous motor drive control vector system, set up Matlab/Simulink model, and encapsulation, then set up double closed-loop and three closed loop servo system based on vector control, verified the simulation results and analyzed the motor performance.
关键词:电磁弹射系统;永磁直线同步电机;矢量控制;数学建模;Matlab仿真
Key words: electromagnetic aircraft launch system;permanent magnet linear synchronous motor;vector control;mathematical modeling;matlab simulation
中图分类号:TM341 文獻标识码:A 文章编号:1674-957X(2020)24-0083-04
0 引言
电磁弹射技术是一种新型的直线推进技术,整个电磁弹射系统主要包括直线电动机、功率变换系统、储能供电系统、检测控制系统等。[1]直线电动机作为组成电磁弹射系统的核心部分,将输入的电能转化为动能,借助电磁力或洛伦兹力,在一定时间与距离内完成对物体的加速进而弹射。在整个系统中,直线电机既是动力提供者,同时又与弹射目标一起运动,作为系统的控制对象,其性能高低直接影响电磁弹射系统的效率[2]。而永磁直线同步电机(Permanent Magnet Linear Synchronous Motor,PMLSM)推力密度高、推力波动小、功率因数高、能够有效利用电能,因此更适用于电磁弹射系统[2]。本文针对应用于电磁弹射系统的PMLSM,对其控制性能进行仿真分析,通过MATLAB/Simulink建立d-q轴系的PMLSM仿真模型,根据建立的模型完成PMLSM的矢量控制系统设计。通过对仿真结果的分析,得以验证控制方法的正确性。
1 PMLSM仿真模型建立
1.1 数学模型
永磁直线同步电机是一个复杂非线性、强耦合的系统,为了保证所建立的模型的精确性,以及便于分析,作如下假设[3]:①忽略电机磁路饱和影响,不计定、动子磁滞和涡流损耗;②忽略电机端部效应影响,不计永磁体阻尼作用,动子无阻尼绕组;③忽略电机磁场的高次谐波影响,电机相绕组对称分布,定子电动势按正弦规律变化。
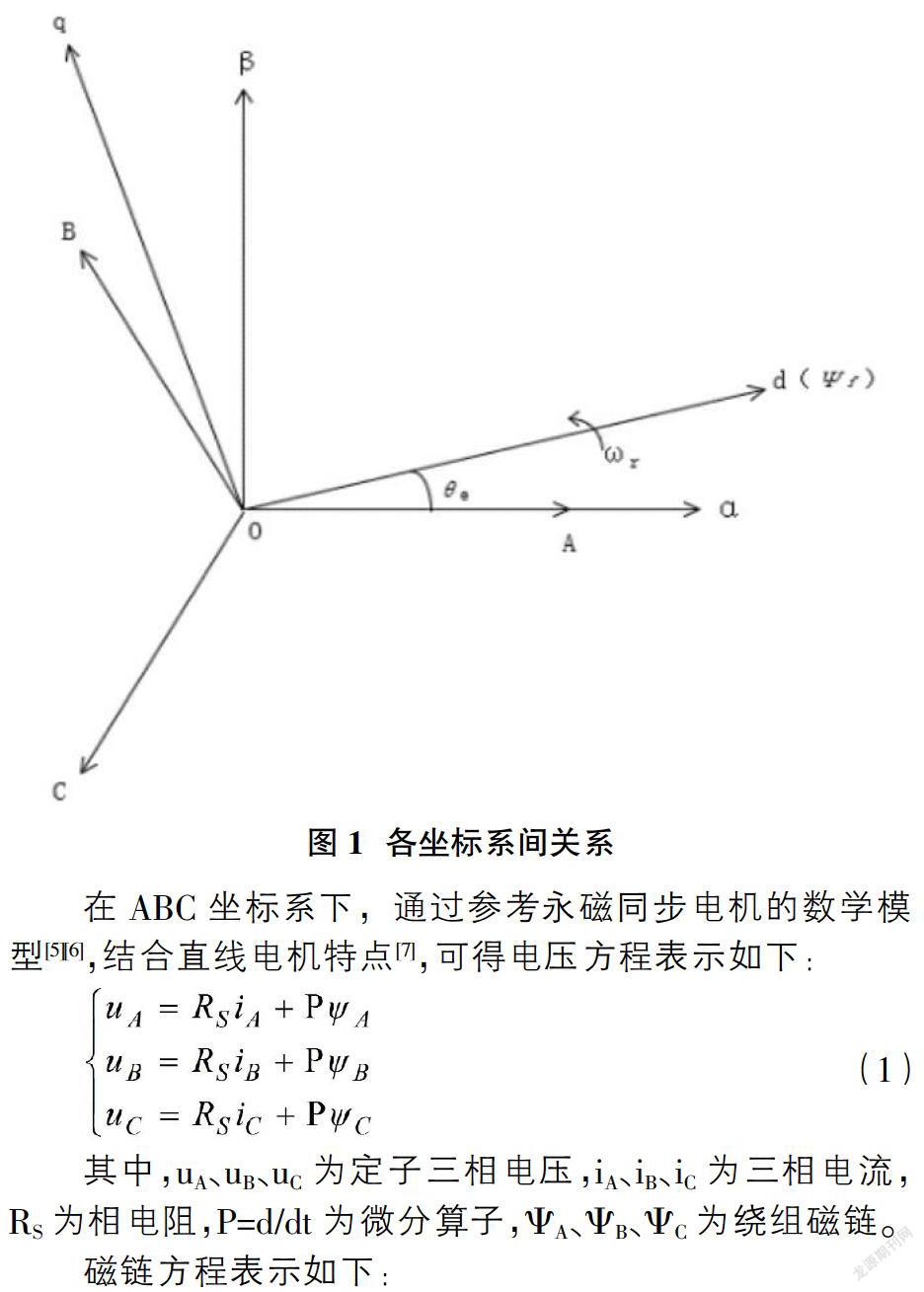
永磁直线同步电机在空间坐标系的转换关系如图1所示[4]。
在ABC坐标系下,通过参考永磁同步电机的数学模型[5][6],结合直线电机特点[7],可得电压方程表示如下:
其中,uA、uB、uC为定子三相电压,iA、iB、iC为三相电流,RS为相电阻,P=d/dt为微分算子,ΨA、ΨB、ΨC为绕组磁链。
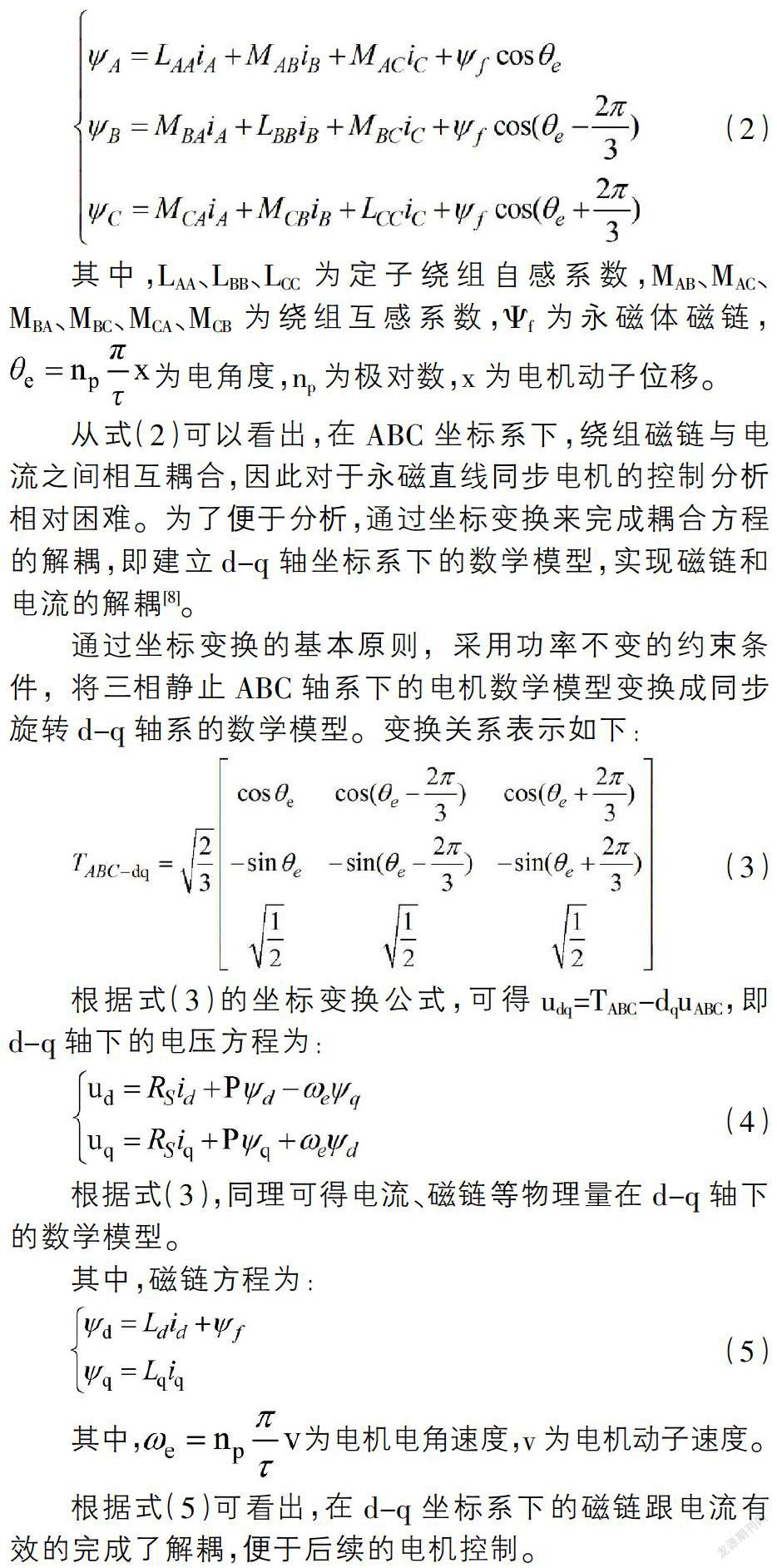
磁链方程表示如下:
其中,LAA、LBB、LCC为定子绕组自感系数,MAB、MAC、MBA、MBC、MCA、MCB为绕组互感系数,Ψf为永磁体磁链,■为电角度,np为极对数,x为电机动子位移。
从式(2)可以看出,在ABC坐标系下,绕组磁链与电流之间相互耦合,因此对于永磁直线同步电机的控制分析相对困难。为了便于分析,通过坐标变换来完成耦合方程的解耦,即建立d-q轴坐标系下的数学模型,实现磁链和电流的解耦[8]。
通过坐标变换的基本原则,采用功率不变的约束条件,将三相静止ABC轴系下的电机数学模型变换成同步旋转d-q轴系的数学模型。变换关系表示如下:
根据式(3)的坐标变换公式,可得udq=TABC-dquABC,即d-q轴下的电压方程为:
根据式(3),同理可得电流、磁链等物理量在d-q轴下的数学模型。
其中,磁链方程为:
根据式(5)可看出,在d-q坐标系下的磁链跟电流有效的完成了解耦,便于后续的电机控制。
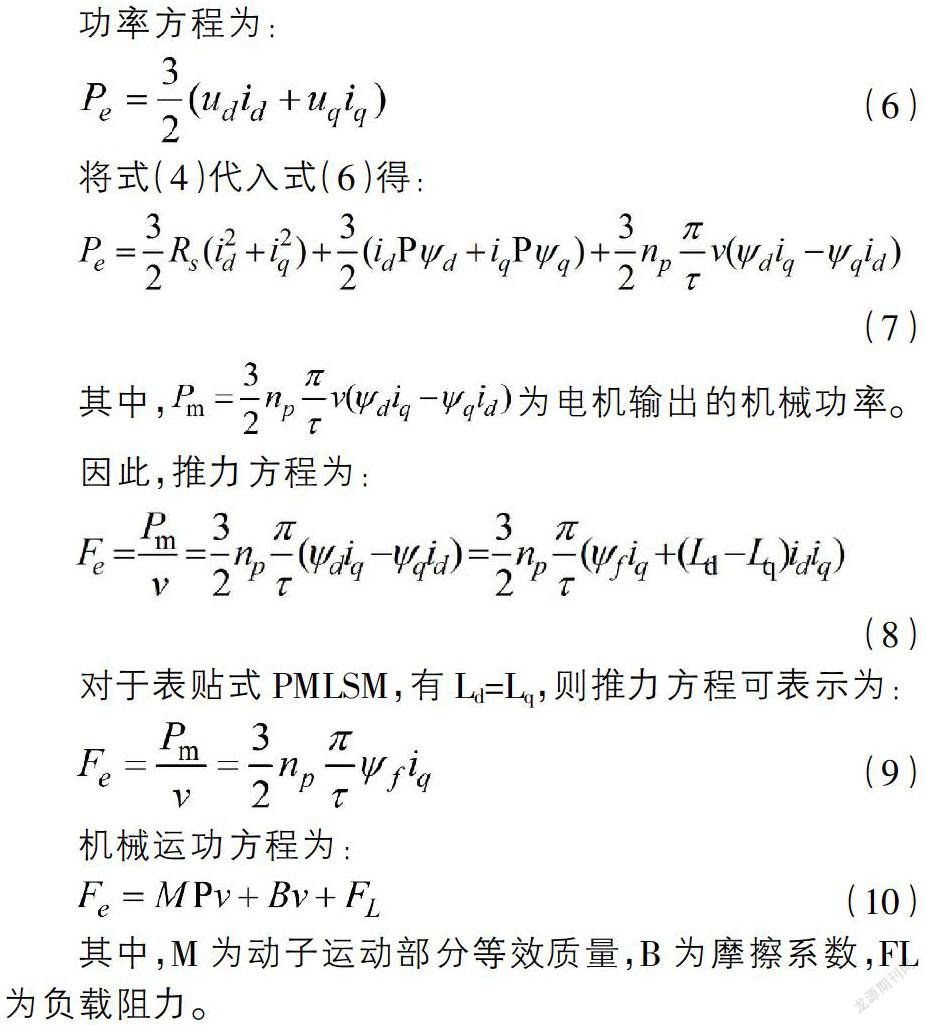
对于表贴式PMLSM,有Ld=Lq,则推力方程可表示为:
机械运功方程为:
其中,M为动子运动部分等效质量,B为摩擦系数,FL为负载阻力。
由式(4)-式(10)的方程,就建立了完整的永磁直線同步电机数学模型。
1.2 仿真模型
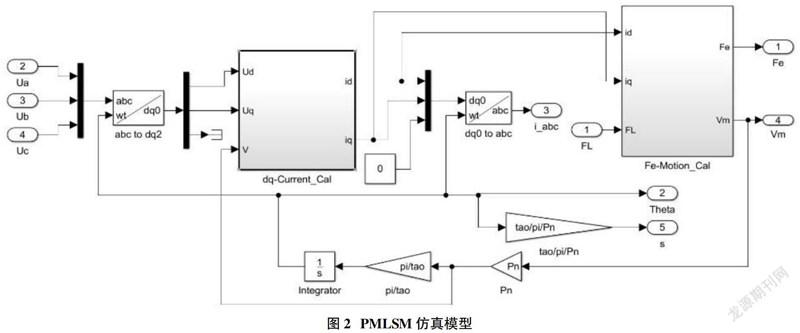
根据1.1所建立的数学模型,在Matlab/Simulink下完成仿真模型的搭建。
PMLSM的仿真模型主要由两部分构成,即电气模块和机械模块。电气模块由电压方程和磁链方程建立,根据其计算得到d-q轴电流。机械模块由推力方程和运动方程建立,电机推力和动子速度作为输出量。最后,将三相电压作为输入量,经过Park变换,得到d-q轴电压,经过电气模块,输出d-q轴电流,经过反Park变换,将三相电流作为最终输出量,结合机械模块,将动子位移、动子速度和电磁推力作为PMLSM的最终输出量。如图2即为完整的PMLSM仿真模型。
2 基于矢量控制的PMLSM仿真实验
2.1 id=0控制策略
在PMLSM控制技术中,矢量控制应用最为广泛,而id=0的控制策略在矢量控制中应用最为广泛。矢量控制的基本原理是通过空间坐标变换,完成推力与磁链的解耦,使得交流电机励磁磁场与电枢磁场的方向在空间上保持正交,实现对电枢电流幅值的控制。针对永磁直线同步电机的非线性和耦合特性,采用id=0的控制策略,令d轴电流为0,通过控制q轴电流直接控制PMLSM的电磁推力。同时结合SVPWM控制算法[9],得以获取更平稳的电磁推力。通过这一控制方法,对于电机复杂的电磁关系进行了有效的解耦,有效降低了系统损耗,提高了电机控制效率。
2.2 双闭环调速系统仿真模型
双闭环的调速系统中,对控制系统采用双闭环PI控制,速度环为系统外环,占主导地位,通过对系统设定值与反馈值进行比较所得到的差值进行PI调节,减小速度跟随误差。电流环为系统内环,动态响应速度最快,采用id=0的动子磁场定向控制,完成id、iq解耦,获取最大电磁推力。在电流环中,将系统检测到的三相电流经坐标变换得到id、iq,作为反馈值,速度环输出的电流作为系统设定值,将两者比较所得的差值进行PI调节,得到d-q轴电压,经过反park变换,输出α-β轴电压,再经SVPWM算法进行调制,将调制信号输入逆变器,作用于电机。
2.3 三闭环伺服系统仿真实验
三闭环伺服系统,在双闭环基础上增加了位置环,作为最外环[10]。其响应速度要低于速度环,否则系统会震荡。位置环根据检测到的实际位置与设定值比较,将偏差值经位置调节器作用得到相应的期望速度值。
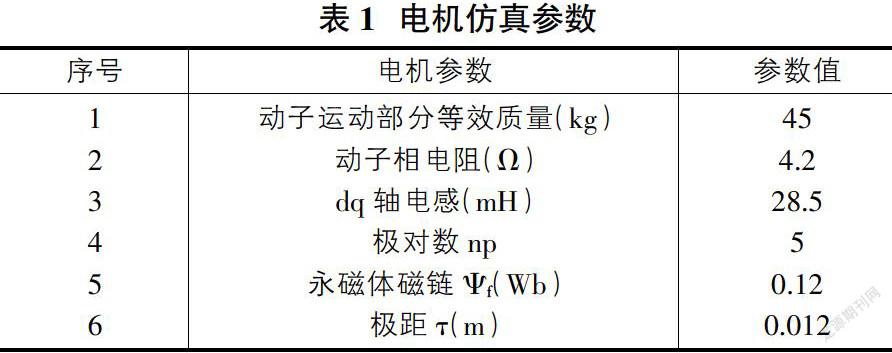
结合双闭环的仿真建模分析,可得系统三闭环的矢量控制结构框图如图3所示,三闭环伺服系统仿真建模如图4所示。
3 仿真结果及分析
仿真所用电机的主要参数如表1。
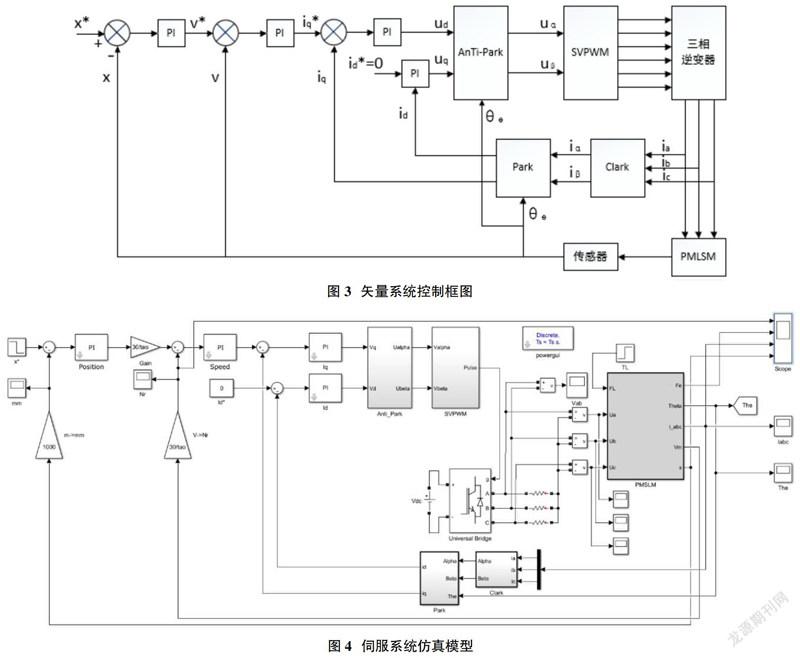
在PMLSM调速系统中,电机空载起动,在t=1s时施加负载,Fe=200N。电机给定初始转速Nr=500rad/s,t=2s时施加速度指令,转速突变为Nr=700rad/s。速度环增益设置为Kvp=0.05,Kvi=5。电流环增益设置为Kdp=1900,Kdi=280000,Kqp=380,Kqi=200000。根据以上所设置的参数,得到电机如图5的仿真波形。
从图5可以看出,在启动阶段,通过设置适当的PI增益,系统可快速达到给定速度;在t=1s时,给电机施加负载,速度有及其微弱的抖动量,此时电磁推力快速响应,达到指定值,此时的电磁推力主要用于克服负载,同时q轴电流也很快达到额定值;在t=2s时,施加速度指令,响应速度快速到达指令速度,但存在一定的超调量,跟踪速度出现较大误差,同时电磁推力有较为明显的超调。在PMLSM的双闭环调速系统中,可以看出,PI控制有一定的鲁棒性能,但其性能还有待改进。
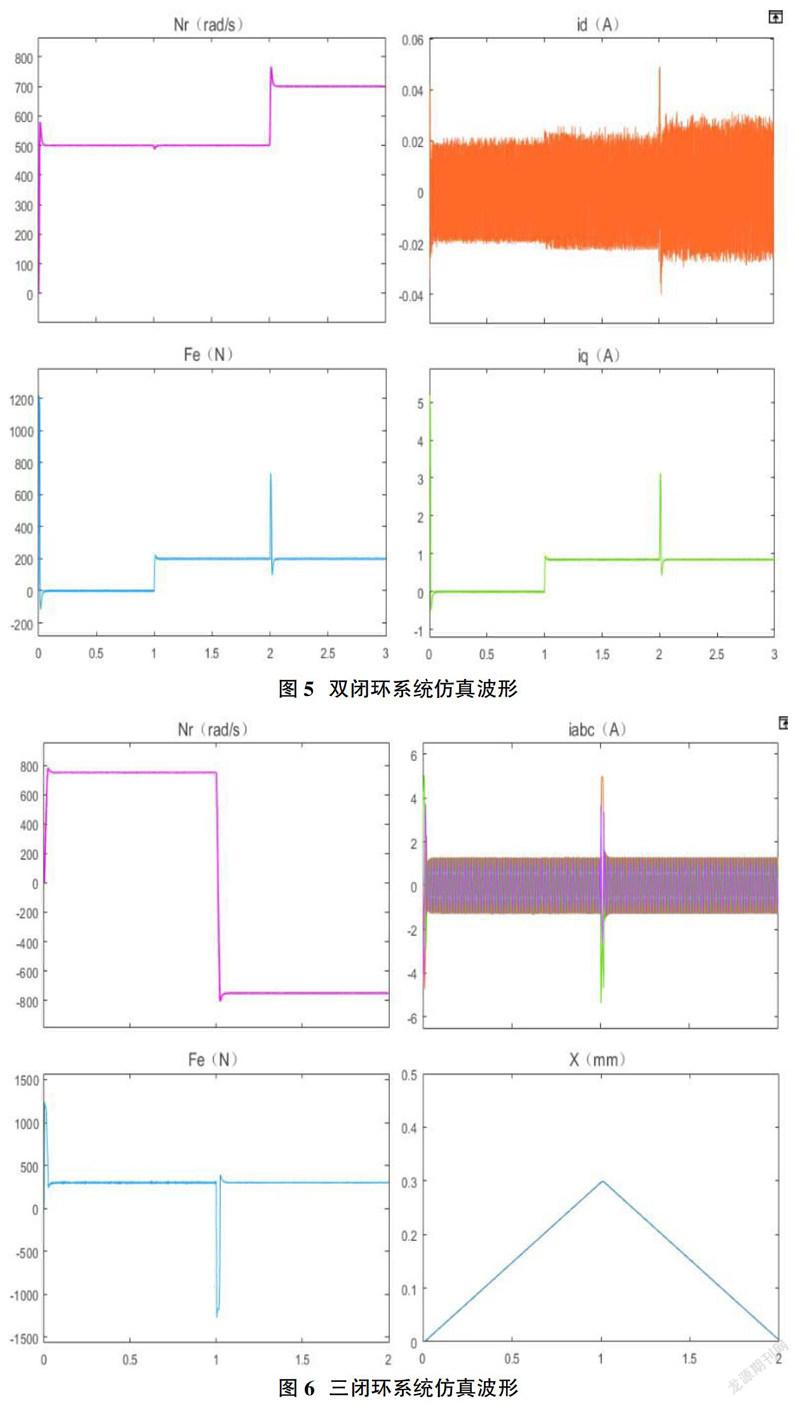
在PMLSM伺服系统中,电机带载起动,在t=1s时施加位置指令,电机反向运动。位置环增益设置为Kpi=1.2,Kxi=0。速度环增益设置为Kvp=0.1,Kvi=10。电流环增益设置为Kdp=300,Kdi=100000,Kqp=380,Kqi=200000。根据以上所设置的参数,得到电机如图6仿真波形。
从图6可以看出,在启动阶段,系统响应速度极快,电机转速达到额定值,电磁推力同样达到额定值,但有较大幅度的超调,通过施加的位置指令,电机反向运动,系统各参数量都出现了一定幅度的超调,但恢复时间极快。在三闭环的伺服系统中,系统完成了一次完整的直线电机往复运动,电机启动,达到额定速度,稳速运行,接受到指令,减速再进行反向加速,同样在到达额定速度后稳速运行一段时间再减速至0,即回到电机出发位置。
4 结论
本文通过参考旋转电机的数学模型并结合PMLSM结构特点,在Matlab中完成其仿真模型的搭建,并建立了双闭环与三闭环的矢量控制系统仿真模型,对其进行仿真分析,验证其控制性能,可以得知,PMLSM的闭环控制精度较高,在电磁弹射系统的应用中其结构具有一定的优越性。
参考文献:
[1]李俊,吴峻.无人机电磁弹射控制策略分析与优化[J].微特电机,2019,47(02):61-64,68.
[2]杜超,孟大伟.基于场路结合法的电磁弹射用新型永磁直线同步电机的研究[J].电机与控制学报,2019,23(09):65-74.
[3]朱晓东,曾庆山,王茜,焦留成.永磁直线同步电机矢量控制模型及仿真的研究[J].煤矿机械,2006(03):417-419.
[4]袁雷,胡冰新,魏克银,等.现代永磁同步电机控制原理及MATLAB仿真[M].北京:北京航天航空大学出版社,2016.
[5]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2014.
[6]刘晓黎.基于永磁同步电机数学模型的矢量控制理论、仿真、实验及应用研究[D].合肥工业大学,2017.
[7]唐传胜.永磁同步直线电机控制方法研究[D].电子科技大学,2014.
[8]Jin Jianxun, Zhao Huibin, Ying Xin and Sun Yuwei.Simulation and analysis of a PMLSM control system based on SVPWM, Proceedings of the 29th Chinese Control Conference, Beijing, 2010, pp. 3316-3320.
[9]牛灏然,李星雨,王洪林,唐明,梁得亮.基于SVPWM的永磁直线同步电机控制系统设计与实现[J].微电机,2016,49(06):28-32,102.
[10]孙宜标,魏秋瑾,王成元.永磁直线同步电机二阶滑模控制仿真研究[J].系统仿真学报,2009,21(07):2037-2040,2045.
猜你喜欢
现代情报(2016年11期)2016-12-21
科学与财富(2016年26期)2016-12-01
考试周刊(2016年84期)2016-11-11
考试周刊(2016年84期)2016-11-11
考试周刊(2016年85期)2016-11-11
课程教育研究·学法教法研究(2016年21期)2016-10-20
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17
成才之路(2016年26期)2016-10-08
考试周刊(2016年11期)2016-03-17