
基于改进K近邻算法的船舶通航环境智能识别
2020-10-20 05:43王壮李嘉源黄连忠王凯姜雅乔马冉祺
上海海事大学学报 2020年3期
王壮 李嘉源 黄连忠 王凯 姜雅乔 马冉祺

摘要:为实现船舶能效的智能优化,从船舶通航环境出发,研究船舶通航环境的智能识别方法。基于所获得的船舶通航環境大数据,建立基于改进K均值聚类算法的船舶通航环境类别知识库,设计相关系数加权的K近邻算法,实现船舶通航环境的智能识别。实例分析结果表明,此基于改进K近邻算法的智能识别方法的识别准确率可达97.25%,相对于未改进的K近邻算法,准确率提高7.81%。所提出的智能识别方法可为基于通航环境智能识别的船舶分段航速智能优化方法的研究奠定基础。
关键词:通航环境; K均值聚类; K近邻算法; 智能识别
中图分类号: U676.3
文献标志码:A
Intelligent identification of ship navigation environment
based on improved K-nearest neighbor algorithm
WANG Zhuang, LI Jiayuan, HUANG Lianzhong, WANG Kai,
JIANG Yaqiao, MA Ranqi
(Marine Engineering College, Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract:
In order to realize the intelligent optimization of ship energy efficiency, starting from the ship navigation environment, the intelligent identification method of the ship navigation environment is studied. Based on the obtained ship navigation environment big data, a knowledge base of ship navigation environment categories based on the improved K-means clustering algorithm is established, and a K-nearest neighbor algorithm weighted by correlation coefficients is designed to realize the intelligent identification of ship navigation environment. The example analysis results show that, the identification accuracy of the intelligent recognition method based on the improved K-nearest neighbor algorithm can reach 97.25%, which can increase the accuracy rate by 7.81% compared with the unimproved K-nearest neighbor algorithm. The proposed intelligent identification method can lay the foundation for the research on the intelligent optimization method of ship segmentation speed based on the intelligent identification of navigation environment.
Key words:
navigation environment; K-means clustering; K-nearest neighbor algorithm; intelligent identification
0 引 言
船舶在航行期间所处的通航环境对船舶能效有重要影响,在燃油价格高居不下[1]、水运能源消耗量大、船舶排放对环境造成污染的背景下[2-4],节能减排一直是航运领域的热点话题。当船舶在水面航行时,风、浪、流等通航环境要素会对船舶运行状态产生影响,通航环境能够引起船舶的附加阻力,如风阻、波浪增阻等,从而使得船舶的总阻力增加,进而影响船舶的航行和能效水平。IMO对某型船的研究表明,船舶推进力中有三分之一左右用于克服由兴波、水流和风速等环境因素引起的增阻[5]。在通航环境研究方面:张宝吉[6]和KURODA等[7]提出了船舶波浪增阻的简化算法;王典[8]通过在非结构网格上模拟由水和空气构成的自由界面问题,对水面波浪进行数值模拟,并分析了其对船舶航行的影响;WANG等[9]考虑多变的通航环境对船舶能效进行了优化;YAN等[10]考虑通航环境对内河船舶航速进行了优化。船舶航行环境的特殊性和复杂性也会对船舶动力系统的工况和运行状态产生一定的影响,进而影响船舶动力系统的能耗水平。例如,当船舶在顺水中航行时,因水流方向与船舶前进方向相同,螺旋桨的对水速度有所下降,使螺旋桨的特性曲线左移,主机运行工况点发生改变,功率和转速均有所下降。[11]综上所述,通航环境会影响船舶航行或动力系统,进而影响船舶能效水平。在基于通航环境对航速进行分段优化的研究中,将航线智能分为通航环境近似的航段是实现有效航速优化的关键,然而目前尚缺少对通航环境智能识别方法的研究。本文提出一种通航环境智能识别方法,通过改进K近邻算法,可实现通航环境的精准识别,为实现船舶航线智能分段提供依据。
1 通航环境智能识别方法及意义
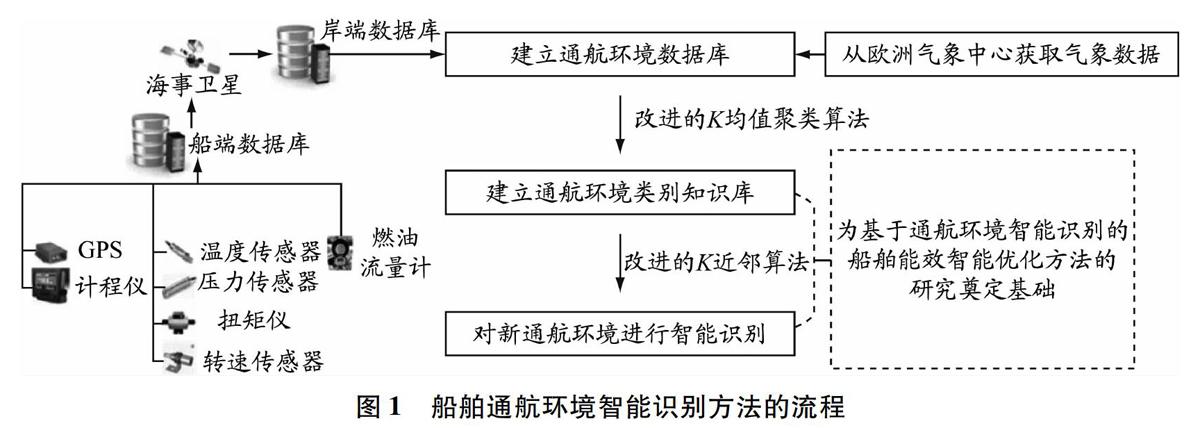
风、浪、流的变化会影响船舶的总阻力变化,进而影响主机功率和燃油消耗率的变化。通航环境的变化也会影响航行时间和航线的选择[12]。为实现船舶通航环境的智能识别,需要先收集通航环境数据,再应用智能识别算法实现。本文从船舶通航环境入手,设计船舶通航环境智能识别方法。该方法实现过程如图1所示,主要包括以下几个步骤:
步骤1 获取船端数据,通过船上的数据采集设备采集船端数据并通过海事卫星将数据传到岸端。
步骤2 获取气象数据,通过欧洲气象中心网站下载航线上的气象数据。
步骤3 建立通航环境数据库,将船端数据和气象数据按时间序列整合在一起。
步骤4 收集数据并建立通航环境类别知识库,通过改进的K均值聚类算法实现。
步骤5 对新通航环境进行智能识别,通过改进的K近邻算法实现。
对于定航线的船舶,在航程和航行时间一定的情况下,依据不同的通航环境将航线划分为航段进而优化航速是提高船舶经济性的一种有效手段。通航环境的智能识别可以为航段划分提供依据,并且根据通航环境预报可以实现航段的动态划分,实现航速的动态优化,使整个航次的油耗降低。
2 实船数据采集与处理
2.1 目标船数据采集
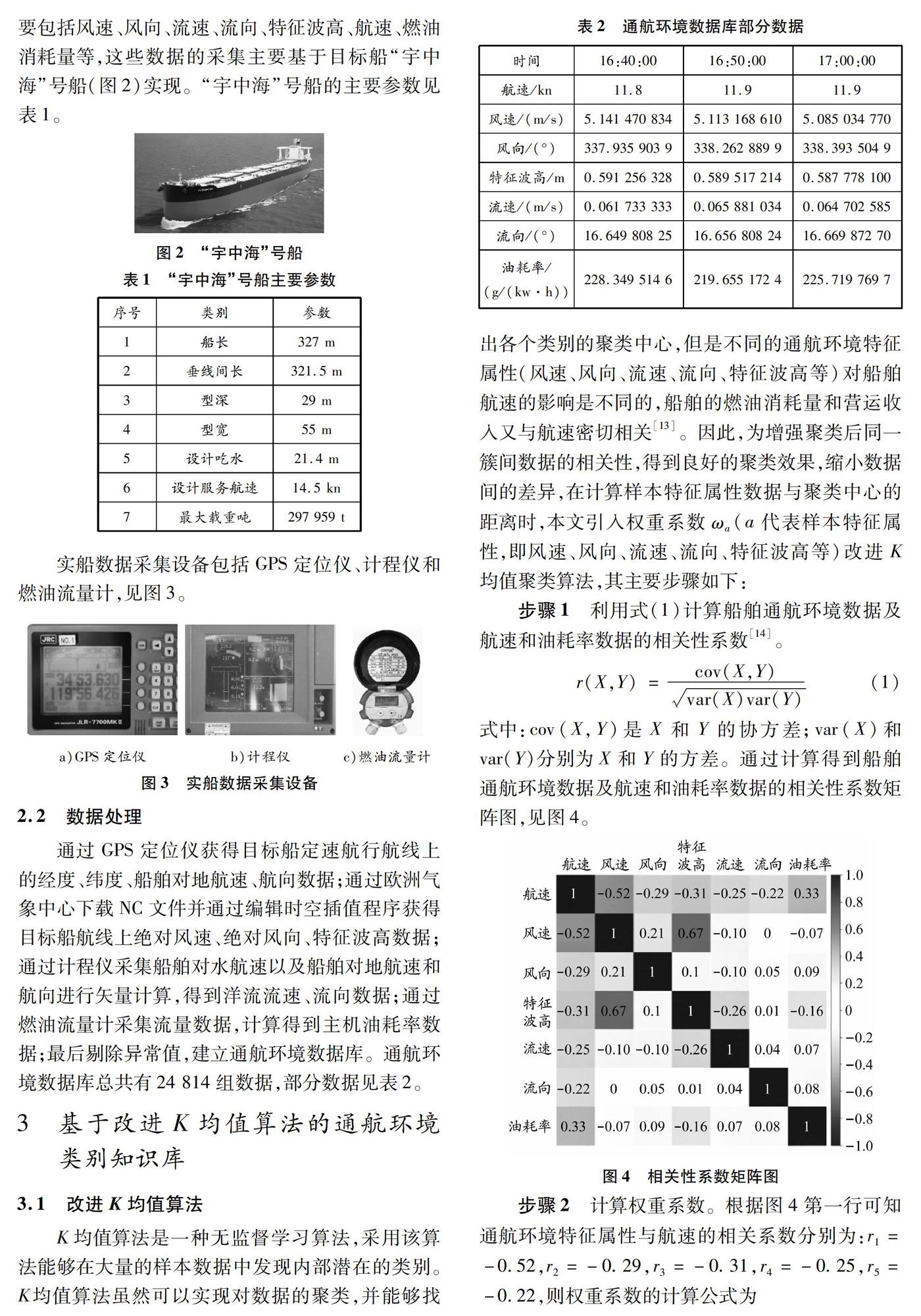
为实现通航环境的智能识别,需要采集船舶通航环境和能效数据并建立数据库。所采集的参数主要包括风速、风向、流速、流向、特征波高、航速、燃油消耗量等,这些数据的采集主要基于目标船“宇中海”号船(图2)实现。“宇中海”号船的主要参数见表1。
实船数据采集设备包括GPS定位仪、计程仪和燃油流量计,见图3。
2.2 数据处理
通过GPS定位仪获得目标船定速航行航线上的经度、纬度、船舶对地航速、航向数据;通过欧洲气象中心下载NC文件并通过编辑时空插值程序获得目标船航线上绝对风速、绝对风向、特征波高数据;通过计程仪采集船舶对水航速以及船舶对地航速和航向进行矢量计算,得到洋流流速、流向数据;通过燃油流量计采集流量数据,计算得到主机油耗率数据;最后剔除异常值,建立通航环境数据库。通航环境数据库总共有24 814组数据,部分数据见表2。
3 基于改进K均值算法的通航环境类别知识库
3.1 改进K均值算法
K均值算法是一种无监督学习算法,采用该算法能够在大量的样本数据中发现内部潜在的类别。K均值算法虽然可以实现对数据的聚类,并能够找出各个类别的聚类中心,但是不同的通航环境特征属性(风速、风向、流速、流向、特征波高等)对船舶航速的影响是不同的,船舶的燃油消耗量和营运收入又与航速密切相关[13]。因此,为增强聚类后同一簇间数据的相关性,得到良好的聚类效果,缩小数据间的差异,在计算样本特征属性数据与聚类中心的距离时,本文引入权重系数
ωa(a代表样本特征属性,即风速、风向、流速、流向、特征波高等)改进K均值聚类算法,其主要步骤如下:
步骤1 利用式(1)计算船舶通航环境数据及航速和油耗率数据的相关性系数[14]。
式中:cov(X,Y)是X和Y的协方差;var(X)和var(Y)分别为X和Y的方差。通过计算得到船舶通航环境数据及航速和油耗率数据的相关性系数矩阵图,见图4。
步骤2 计算权重系数。根据图4第一行可知通航环境特征属性与航速的相关系
数分别为:r1=-0.52,r2=-0.29,r3=-0.31,r4=-0.25,r5=-0.22,则权重系数的计算公式为
步驟5 根据式(4)计算得到样本数据聚类后类别ci,直到式(5)收敛并得到聚类中心。
步骤6 验证函数是否收敛,收敛公式为
式中:J代表所有研究对象的平方误差总和;p为空间中的点,即数据对象;mi是ci的平均值。按照这个准则生成的结果簇趋向于独立和紧凑[15]。
步骤7 若函数不收敛,则根据式(6)更新聚类中心,得到新的聚类中心
,并转到步骤4,直到J的值不再发生变化。
为验证改进算法的效果,对改进前后的算法进行对比分析,采用未改进的K均值聚类算法和改进的K均值聚类算法对风速、风向、特征波高聚类,聚类后的对比散点图见图5。改进K均值聚类算法前,聚类散点比较集中,这是因为在改进前样本的特征属性权重相同,即风速、风向、特征波高对航速的影响相同,而实际上风速、风向、特征波高对航速的影响不同。改进K均值聚类算法后,聚类散点分布稍有分散,这是因为改进后样本的特征属性权重不同,即风速、风向、特征波高对航速的影响不同,与实际相符。
3.2 建立通航环境类别知识库
利用上述改
进K均值聚类算法步骤对通航环境5维数据进行聚类。选取K值为16,算法经过56次迭代后收敛,最后得到每个样本的类别及其聚类中心。表3就是利用改进的K均值聚类算法建立
的通航环境类别知识库。通航环境类别知识库在验证船舶通航环境智能识别准确率时作为训练样本数据,为下文基于改进K近邻算法的通航环境智能识别对比验证奠定基础。
此外,通过上述方法获得各个聚类类别的数量,见表4。各个类别分布相对比较均匀,没有出现某一类的数量极多或某一类的数量极少的情况,这说明在经过选取和处理后,异常的数据已经被完全剔除,所建立的通航环境类别知识库是合理的。
4 基于改进K近邻算法的通航环境智能识别
船舶在航行过程中,通过海事卫星定时接收航线上的通航环境预报数据,然后根据智能识别算法识别航线上的通航环境类别。图6为船舶航行中的通航环境智能识别流程。
4.1 改进K近邻算法
由于在建
立通航环境类别知识库时,需要考虑通航环境与航速的相关性,通航环境智能识别需要将通航环境类别知识库作为识别的样本数据。如果利用未改进的K近邻算法进行识别,则每个通航环境特征属性对航速的影响权重是相同的,会使算法识别不准确。为提高算法的准确性,本文引入权重系数ωl对K近邻算法进行改进。ωl的计算方法与上文改进K均值聚类算法时所用的公式是一样的,即ωl=ωa。改进K近邻算法的步骤如下:
步骤1 构建训练样本集
[WTHX]X[WTBX]。
步骤2 设定K的初值。K值的确定没有统一的方法,需要反复试验才能获得。
步骤3 在训练样本集中选出与测试样本最近的k个样本。样本点
4.2 K近邻算法改进前后智能识别对比验证
改进K近邻算法中的K是一个非常重要的参数,K值选得过小会使分类不精确,选得过大则会增加噪声,降低分类效果。选取通航环境类别知识库,共16类24 814组数据作为训练样本;每类数据选取200组,共有3 200组数据作为测试样本。经过反复地选取K值,统计识别错误样本的数量,得到K取337时分类识别效果良好。图7为K取337时的测试结果:采用未改进的K近邻算法识别错误的测试样本组数为338组,识别准确的测试样本组数为2 862组,识别准确率为89.44%;采用改进的K近邻算法识别错误的测试样本组数为88组,识别准确的测试样本组数为3 112组,识别准确率为97.25%。通过对比得知,对K近邻算法改进后其通航环境智能识别的准确率提高了7.81%,从而验证了改进的K近邻算法具有良好的智能识别效果。
4.3 通航环境智能识别应用
图8是船舶在定速航行状态下,应用通航环境智能识别算法对航线智能分段的示意图,图中每个航段Wi的通航环境是相似的。
5 结 论
本文基于实船数据,首先构建了数据获取的渠道。船端数据通过实船数据传感器采集获取,气象数据从欧洲气象中心网站下载获取。其次,设
计了K均值聚类算法的改进方法。由于船舶不同的通航环境特征属性对航速的影响不同,加入权重系数后更能体现通航环境对航速的影响作用,本文引入权重系数ωa对K均值聚类算法进行了改进。最后,设计了K近邻算法的改进方法。由于在实现通航环境智能识别时将通航环境类别知识库作为训练样本,为提高识别准确率,针对未改进的K近邻算法对每个特征属性权重相同的问题,引入权重系数ωl对K近邻算法进行了改进。用改进的K近邻算法对3 200组测试样本进行识别,准确率达到97.25%,比改进前K近邻算法的识别准确率提高了7.81%。本文提出的通航环境智能识别方法,可以为基于通航环境智能识别的船舶航线智能分段优化方法的研究奠定基础。
参考文献:
[1]GARCA-MARTOS C, RODRGUEZ J , SNCHEZ M J. Modelling and forecasting fossil fuels, CO2 and electricity prices and their volatilities[J]. Applied Energy, 2013, 101: 363-375. DOI: 10.1016/j.apenergy.2012.03.046.
[2]WAN Zheng, ZHU Mo, CHEN Shun, et al. Pollution: three steps to a green shipping industry[J]. Nature, 2016, 530(7590): 275-277. DOI: 10.1038/530275a.
[3]DOULGERIS G, KORAKIANITIS T, PILIDIS P, et al. Techno-economic and environmental risk analysis for advanced marine propulsion systems[J]. Applied Energy, 2012, 99: 1-12. DOI: 10.1016/j.apenergy.2012.04.026.
[4]WALSH C, BOWS A . Size matters: exploring the importance of vessel characteristics to inform estimates of shipping emissions[J]. Applied Energy, 2012, 98: 128-137. DOI: 10.1016/j.apenergy.2012.03.015.
[5]Marine Environment Protection Committee. Prevention of air pollution from ships[R]//Second IMO Greenhouse Gas Study 2009. MEPC, 2009: 17.
[6]張宝吉. 基于静水阻力和波浪增阻的全船线型优化[J]. 华中科技大学学报(自然科学版), 2011, 39(10): 32-35. DOI: 10.13245/j.hust.2011.10.024.
[7]KURODA M, TSUJIMOTO M, FUJIWARA T, et al. Investigation on components of added resistance in short waves[J]. Journal of Marine Science and Technology, 2008, 8: 171. DOI: 10.2534/jjasnaoe.8.171.
[8]王典. 数值模拟水面波浪及其对航行环境的影响[D]. 南京: 南京航空航天大学, 2009.
[9]WANG Kai, YAN Xinping, YUAN Yupeng, et al. Dynamic optimization of ship energy efficiency considering time-varying environmental factors[J]. Transportation Research Part D, 2018, 62: 685-698. DOI: 10.1016/j.trd.2018.04.005.
[10]YAN Xinping, WANG Kai, YUAN Yupeng, et al. Energy efficient shipping: an application of big data analysis in engine speed optimization of inland river ships considering multiple environmental factors[J]. Ocean Engineering, 2018, 169: 457-468. DOI: 10.1016/j.oceaneng.2018.08.050.
[11]龚昌奇, 陈宾康, 黄敏. 浅吃水肥大型重件运输船设计研究[J]. 船舶工程, 2009, 31(4): 1-3. DOI: 10.13788/j.cnki.cbgc.2009.04.005.
[12]KONTOVAS C A. The green ship routing and scheduling problem (GSRSP): a conceptual approach[J]. Transportation Research Part D, 2014, 31: 61-69. DOI:10.1016/j.trd.2014.05.014.
[13]赵乾博. 考虑油耗及经济性的营运船舶定航线航速优化[D]. 哈尔滨: 哈尔滨工程大学, 2017.
[14]刘伊凡. 营运船舶主机性能退化和健康管理方法研究[D]. 大连: 大连海事大学, 2018.
[15]杨善林, 李永森, 胡笑旋, 等. K-means算法中的k值优化问题研究[J]. 系统工程理论与实践, 2006(2): 97-101.
[16]桑应宾. 基于K近邻的分类算法研究[D]. 重庆: 重庆大学, 2009.
(编辑 贾裙平)
收稿日期: 2020-01-06
修回日期: 2020-03-20
基金项目:
国家自然科学基金(51909020);中央高校基本科研业务费专项资金(3132019194);无人船协同创新研究院種子基金(3132019009);辽宁省自然科学基金(2019-BS-023); 长江航道局科技项目(201930004)
作者简介:
王壮(1992—),男,河北保定人,硕士研究生,研究方向为现代轮机管理,(E-mail)2410232911@qq.com;
李嘉源(1996—),男,吉林白山市,硕士研究生,研究方向为现代轮机管理,(E-mail)lijiayuan0320@163.com;
黄连忠(1969—),男,辽宁大连人,教授,硕导,博士,研究方向为船舶智能能效,(E-mail)lzhuang@dlmu.edu.cn
