
一种新型稀疏标志点的特征描述算法
2020-10-21 12:12石诚程筱胜崔海华方舟张逸胡广露
机械制造与自动化 2020年5期
石诚,程筱胜,崔海华,方舟,张逸,胡广露
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
近年来,随着航空航天、汽车船舶、机电重工等大型装备制造业蓬勃发展,摄影测量技术因其便携、快速和高精度的优点,正得到越来越多的应用[1]。为将摄影测量应用于大型装备制造装配变形分析,提出一种稀疏标志点数据的特征描述算法,用以匹配变形前后的标志点数据。
目前关于点云数据匹配的研究[2-3]大多针对点云密度较高的数据,一般分为粗配准和精配准[4],通常采用“先粗后精”的思路。粗配准主要分为基于RANSAC[5]和基于特征的配准方法,其中基于特征匹配的方式,更具有效率和鲁棒性[6]。RUSU R B等提出了视点特征直方图[7](viewpoint feature histogram,VFH)特征量和快速点云直方图[8](fast point feature histograms,FPFH)特征量作为描述子;刘剑等[9]将三角剖分与FPFH特征描述相结合,黄源等[10]利用局部几何特征作为描述子,进行数据的匹配。这些描述特征点的思路被借鉴,用以解决稀疏标志点数据的匹配问题,翁金平等[11]使用能量法描述稀疏标志点,实现了标志点的特征匹配,但能量法局限于标志点数据不发生形变的情况,适用性不够广泛。
本文受点特征直方图[12](point feature histograms,PFH)描述算法启发,利用稀疏标志点数据邻域的拓扑信息,进行稀疏标志点数据的匹配。
1 特征描述算法
假设摄影测量在初始状态获取的标志点数据集合为点集P,产生局部形变后获取的数据集合为点集Q。P和Q在不同测量坐标系下且包含未发生形变的点对,稀疏标志点的描述算法根据点邻域的拓扑信息,对P和Q中每个点做唯一描述,描述结果称为描述子。通过描述子确定P和Q的对应点对,并筛选出其中几乎未发生形变的点对,以完成稀疏标志点数据的匹配。
1.1 描述子的建立
任选稀疏数据中一点Po,简述描述子的建立过程:
1)利用KD树检索,查找距离Po最近的k个点,依据这些点与Po的欧氏距离di(i=1,2,…,k):
(1)
将这k个点由近及远,构成k邻域点集Pk(图1)。取k=3,展示了k邻域点集Pk的建立思路。
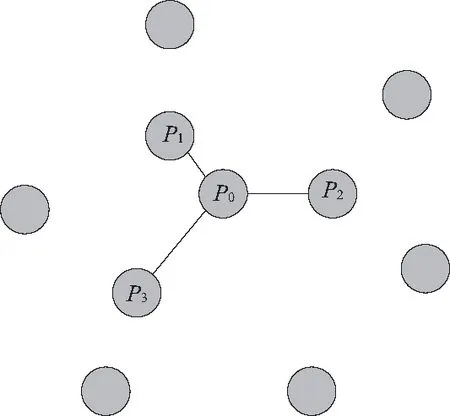
图1 建立k邻域点集Pk
2)对于点集Pk内一点Pi,在Po处建立图2所示的局部坐标系(u,v,w) (U,V,W),其中no为点Po的法矢,建立过程如下:
U=no
(2)
(3)
W=U×V
(4)
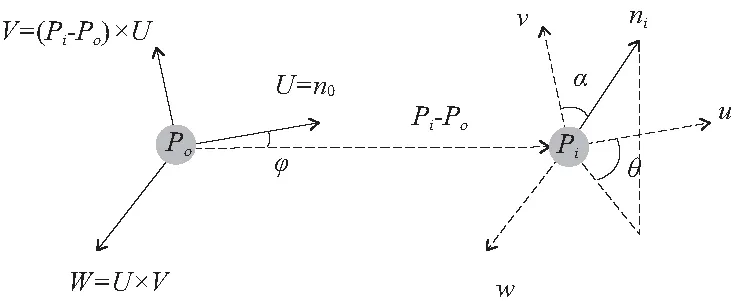
图2 定义局部坐标系
其中:坐标轴u、v、w的方向分别对应矢量U、V、W的方向。
3)基于局部坐标系(u,v,w),根据PFH特征值的计算方法,计算图2中一组角度,来表示点Po法矢no和点Pi法矢ni的偏差:
α=V·ni
(5)
(6)
θ=arctan(W·ni,U·ni)
(7)
4)按照步骤2)、步骤3),分别计算Po与点集合Pk中各点的特征值α、φ、θ,则每对点Po和Pi可得到如下四维描述向量,记为Di:
Di=(di,αi,φi,θi)
(8)
5)按照k邻域点集Pk中的顺序,建立点Po的k×4描述矩阵D,D即为点Po的描述子:
D=(D1,D2,…,Dk)T
(9)
6)将描述矩阵D进一步变形为如下形式,则β为k维的向量,由各邻域点到点Po的欧氏距离构成,B为k×3的矩阵,由各邻域点到点Po的角度特征构成:
D=(βT,B)
(10)
将描述子D拆分,是因为β能够更准确地判断前后点之间的对应关系,而矩阵B更好地折射出形变大小。下文称β为距离向量,称B为角度矩阵。
1.2 描述子相似度的衡量
利用上述算法计算出稀疏数据中每个点的描述子,点集P中所有点的描述子构成集合FP={Dpi|1≤i≤nP,i∈N}, 点集Q中所有点的描述子构成集合FQ={Dqj|1≤j≤nQ,j∈N}。其中nP和nQ分别为点集P和Q中点的总个数,Dpi和Dqj分别为点集P中第i个点和点集Q中第j个点的描述子。

(11)
利用最近邻匹配法(nearest neighbor)[13]和阈值法分析距离向量,初步获取点集P和Q的对应点对。最近邻匹配法即对P中一点Ps,取其对应的距离向量βps,然后搜索出点集Q中距离最近的向量βqt,将点Ps和点Qt视作一对对应点。为了防止误匹配,再使用阈值法,设置阈值h1,若ρ(βpi,βqj)≤h1,则将这对点作为初步匹配结果。
初步获取对应点对后,需筛选出其中几乎没有发生形变的点对,这就要利用角度矩阵。角度矩阵主要描述了查询点与其周围k个邻域点之间的相对位置关系,因此假如该查询点与其k个邻域点的位置较为恒定,角度矩阵并没有太大的变化;反之,角度矩阵则会有明显变化。据此,利用F-范数来衡量角度矩阵的变化大小。以对应点对Ps和Qt为例:
BE=Bps-Bqt
(12)
2 实验结果及分析
2.1 实验过程及评价标准
实验利用加拿大某公司的摄影测量设备获取标志点,图3(a)为初始状态的标志点排布情况,图3(b)模拟了局部形变和位移后,标志点的排布,图中黑色圆内的靶标是基准点,用于变形前后数据匹配,以验证算法精度。实验过程具体步骤如下:
1) 布设标志点,获取标志点点集P;
2) 模拟局部位移和形变,变换测量坐标系,获取标志点点集Q;
3) 通过基准靶标,利用奇异值分解[14](SVD)算法,匹配点集P和Q;
4) 输出对应点的编号,并计算各点变形大小;
5) 利用本文提出的算法,筛选出几乎不形变的对应点对,据此匹配点集P和Q;
6) 输出对应点的编号,计算各点变形大小。
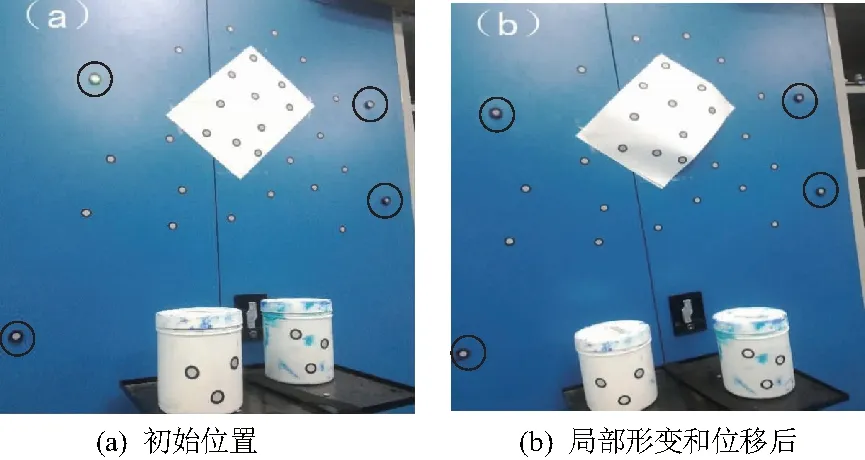
图3 标志点排布情况
步骤4)所得结果作为本次实验的标准值,将步骤6)结果与标准值对比,验证本文算法的准确性和匹配精度。
2.2 实验数据分析
两次测量所获取的点集分别为P和Q,它们的标志点编号分别如图4(a)、图4(b)所示。
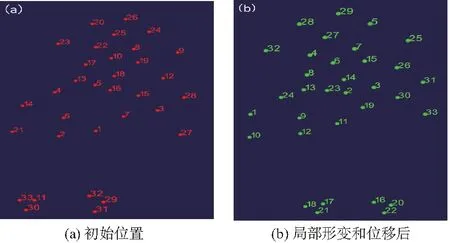
图4 标志点编号
使用本文的算法,得到对应点对的初步匹配关系如图5所示,在获取了初步对应点对匹配结果之后,继续使用本文的算法,筛选出几乎不发生形变的对应点对,这些点对记录在表1。
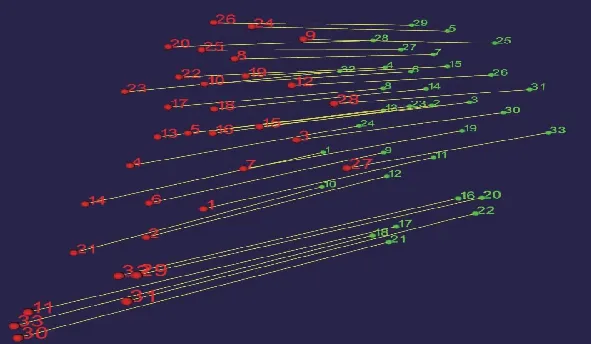
图5 对应点匹配结果
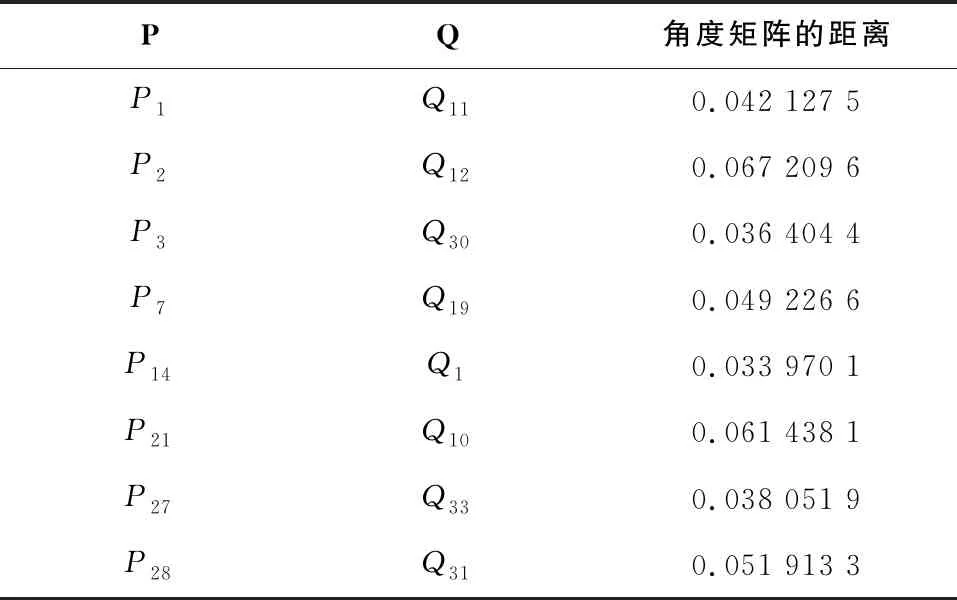
表1 用于匹配的对应点对
利用表1中的对应点对,计算转换矩阵,匹配点集P和Q,并计算各点变形前后的误差。利用基准点匹配所得的误差如图6所示,将作为误差评判的标准。利用本文算法匹配所计算出的误差如图7。将本文算法和标准结果对比,偏差结果如图8所示,最大偏差为-0.098mm,最小偏差为-0.017mm,绝对偏差的平均值为0.029mm。
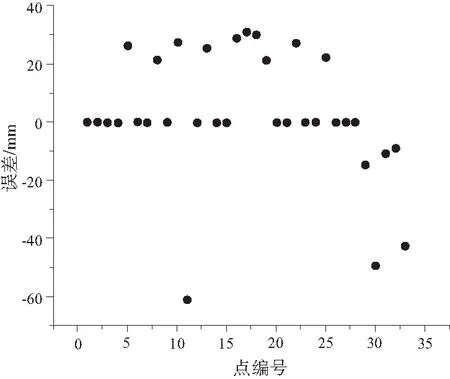
图6 各点标准误差
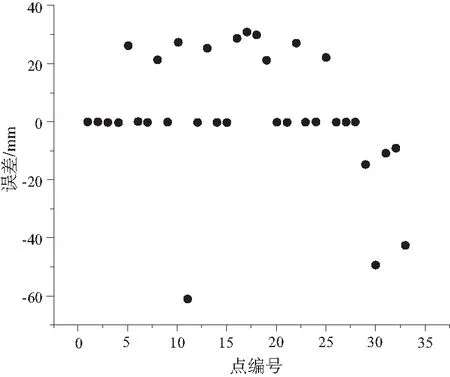
图7 本文算法所得各点误差
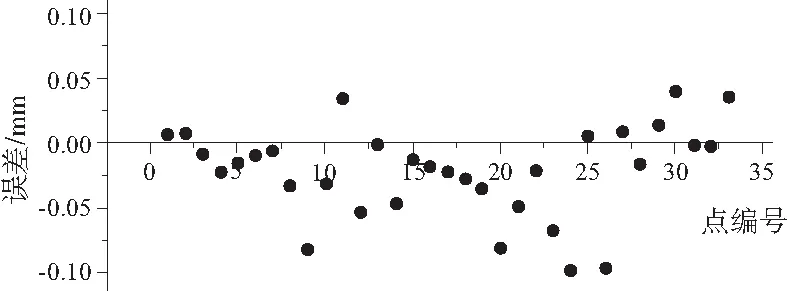
图8 本文算法与标准结果对比
在进行了大量实验统计后,对应点对匹配的成功率接近100%,绝对平均误差为平均值为0.029mm,最低仅为0.008mm。
3 结语
为解决稀疏标志点的匹配问题,本文借助PFH的描述思想,提出了稀疏标志点的特征描述算法,并以此对各标志点进行唯一性描述。实验证明,该算法具有极高的准确性,能够精准地分析出基本不发生形变的对应点对。利
用这些点对求解转换矩阵并完成匹配,平均偏差为0.029mm,足以满足装配周期较长的大尺寸装配摄影测量变形检测的需求。同时,本文的算法也能应用于其他需要标志点匹配的情形,例如基于标志点匹配的点云拼接。为保证匹配结果的准确性,本文对未发生形变的点对筛选过于严格,被筛选出的点在邻域内几乎不发生形变,今后将进一步改进,以适应更多稀疏标志点匹配的应用场景。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
软件导刊(2022年8期)2022-08-25
北京测绘(2022年5期)2022-08-01
初中生学习指导·中考版(2022年1期)2022-02-09
教学月刊·小学数学(2021年2期)2021-02-08
初中生学习指导·中考版(2020年2期)2020-09-10
赢未来(2018年4期)2018-09-27
科技视界(2018年32期)2018-02-21
电子技术与软件工程(2017年20期)2018-01-17
自动化学报(2017年4期)2017-06-15
