基于特征模型的超高速永磁同步电机矢量控制设计
2020-10-21 03:50刘洋
科技创新与应用 2020年30期
关键词:非线性
刘洋
摘 要:超高速永磁同步电机因其具有转速高、功率密度大等优点,被广泛应用于工业、国防、能源等领域。但是本身的物理模型存在较多非线性因素,很难对其建立起精确模型。针对常规建模方式所建模型过于复杂的问题,采用特征建模的思想,对超高速磁同步电机矢量控制系统进行特征建模,仿真结果表明特征模型是有效的。
关键词:超高速永磁同步电机;电机驱动;矢量控制;非线性;特征模型
中图分类号:TM341 文献标志码:A 文章编号:2095-2945(2020)30-0024-02
Abstract: Ultra-high speed permanent magnet synchronous motor is widely used in industry, national defense, energy and other fields because of its high speed and power density. There are many nonlinear factors in the physical model of ultra-high speed permanent magnet synchronous motor, so it is difficult to establish an accurate model. In view of the complexity of the conventional modeling method, this paper adopts the idea of feature modeling to build the feature model of the vector control system of the ultra-high speed magnetic synchronous motor, and the simulation of the feature model proves that the feature model is effective.
Keywords: ultra-high speed permanent magnet synchronous motor; motor drive; vector control; nonlinear; characteristic model
1 超高速永磁同步电机
随着社会经济的发展,人们对现代加工技术的要求越来越高,超高速与超精度加工作为现代加工领域的主要发展方向,越来越受到重视。而电机及其驱动器作为数控加工的核心部件,受到了广泛关注。
超高速永磁同步电机在超高速状态下,转子铁芯损耗、转矩脉动和转子动力学是最关键的因素,相对于传统永磁同步电机模型,主要有如下变化:第一,转子铁芯损耗将产生大量的热,导致电机内部温度升高,温度升高将进一步导致各电学参数的变化以及轴承动力学特性的变化;第二,齿槽转矩和转矩脉动会不可避免地引起转子振动,增加了系统动力学特性的复杂性;第三,转子动力学在超高速运行中起着重要作用,具体来讲,对于一定刚度的轴承而言,随着转速的增加,轴承首先会处在第一阶刚性模态内,其次会进入第二階刚性模态内,最终会到达柔性模态[1-2]。
以硅钢片材料B20AT1500为例,其铁耗特性曲线如图1所示。可以看出,在不同的频率下,其铁耗随磁场强度的变化带有很强的非线性。
图2中,椭圆形区域为超高速电机适合的运行区域,其转子动力学特性介于柔性和刚性之间,因此,继续使用传统动力学方程将不再是最佳建模方式。此外,由于超高速永磁同步电机运行在高速时会产生大量未知非线性,就必须要考虑转子动力学模型复杂的非线性因素才能建立精确的模型并对其控制,这加大了建模与控制设计的难度。
要想很好地对超高速永磁同步电机进行控制,不能忽略其在超高速状态下的复杂非线性特性,但如果精确刻画非线性因素,又会导致模型和控制器设计的复杂化。因此,有必要采取一种区别于传统建模的方式,该建模方式不能忽略超高速电机复杂的非线性特性,同时建出的模型又相对简单,便于控制器设计,这样才能适应超高速电机的特殊性。经过研究,发现特征建模可以胜任这一特殊需求[3]。
2 特征建模简介
经典的控制方式无不依赖于对象的模型。然而,对于复杂对象,很难精确地建模;另一方面控制器设计在满足性能指标要求下越简单越好。所以在20世纪末,吴宏鑫院士发明了特征建模。特征建模结合了对象特性、环境因素、控制要求,是被控对象精确模型的压缩,并且随着现代数字处理器计算能力的提高,使用特征建模十分易于工程实现。
3 超高速永磁同步电机矢量控制系统的特征模型
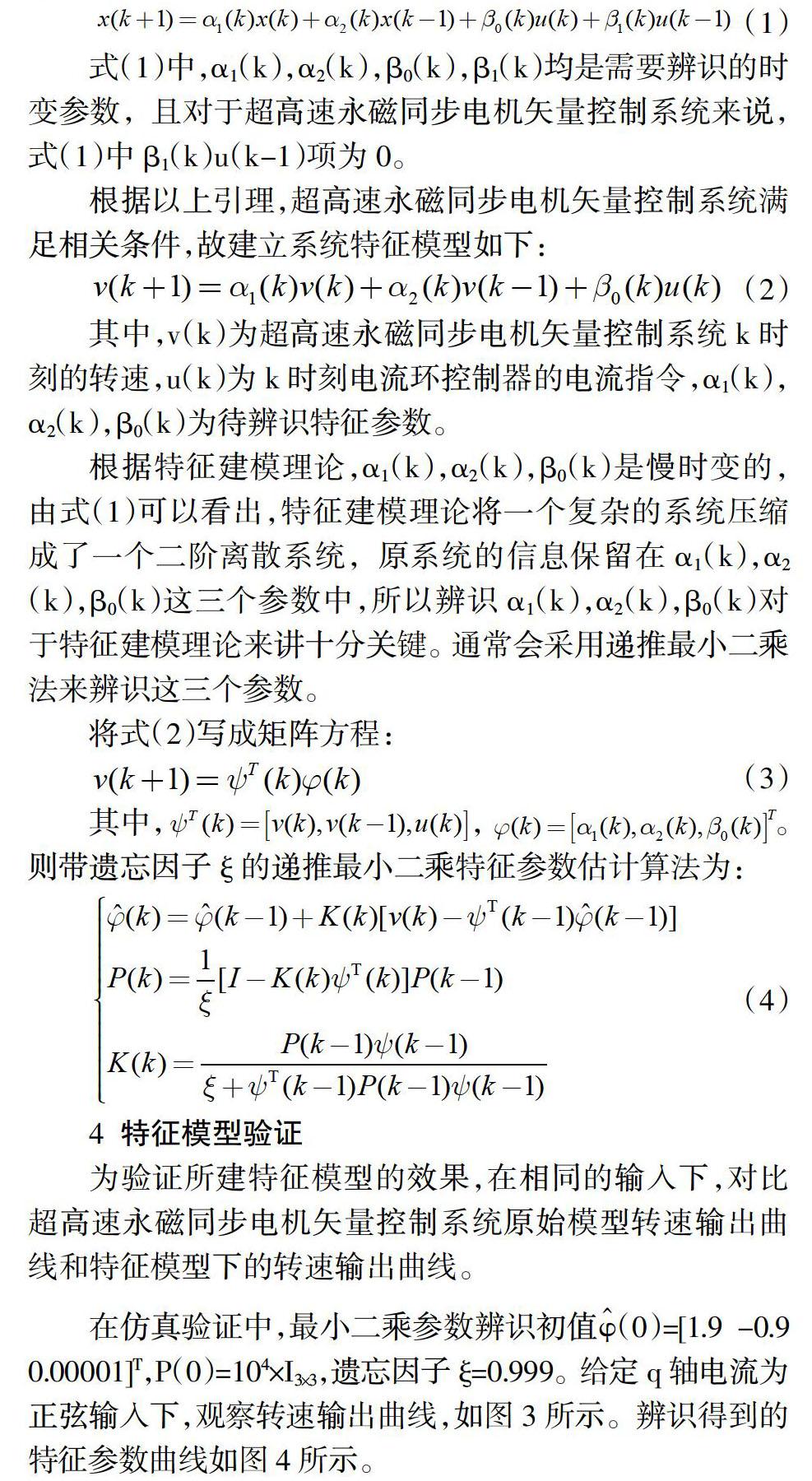
根据特征模型思想,电机系统可用一个二阶时变差分方程描述如下:
式(1)中,?琢1(k),?琢2(k),?茁0(k),?茁1(k)均是需要辨识的时变参数,且对于超高速永磁同步电机矢量控制系统来说,式(1)中?茁1(k)u(k-1)项为0。
根据以上引理,超高速永磁同步电机矢量控制系统满足相关条件,故建立系统特征模型如下:
其中,v(k)为超高速永磁同步电机矢量控制系统k时刻的转速,u(k)为k时刻电流环控制器的电流指令,?琢1(k),?琢2(k),?茁0(k)为待辨识特征参数。
根据特征建模理论,?琢1(k),?琢2(k),?茁0(k)是慢时变的,由式(1)可以看出,特征建模理论将一个复杂的系统压缩成了一个二阶离散系统,原系统的信息保留在?琢1(k),?琢2(k),?茁0(k)这三个参数中,所以辨识?琢1(k),?琢2(k),?茁0(k)对于特征建模理论来讲十分关键。通常会采用递推最小二乘法来辨识这三个参数。
将式(2)写成矩阵方程:
其中, , 。
则带遗忘因子?孜的递推最小二乘特征参数估计算法为:
(4)
4 特征模型验证
为验证所建特征模型的效果,在相同的输入下,对比超高速永磁同步电机矢量控制系统原始模型转速输出曲线和特征模型下的转速输出曲线。
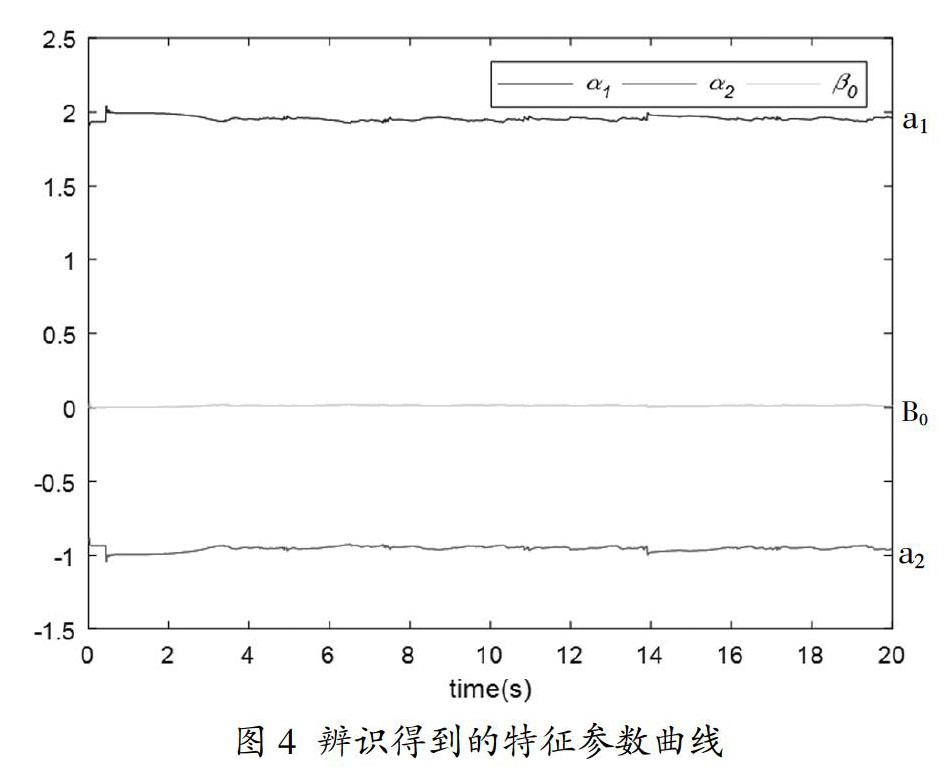
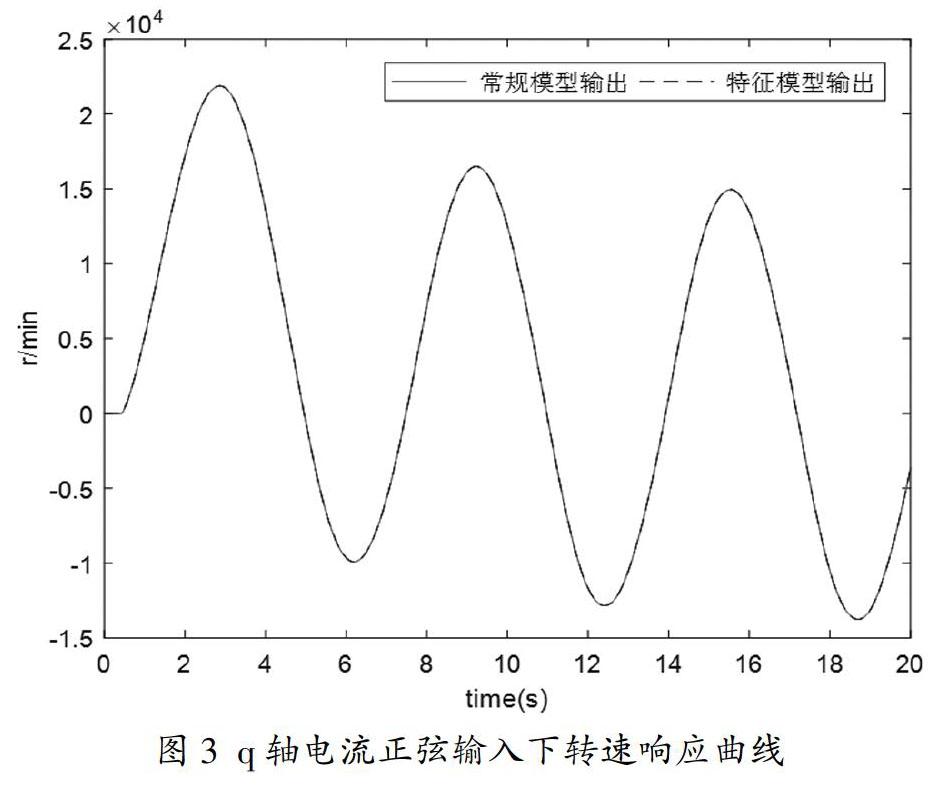
在仿真验证中,最小二乘参数辨识初值(0)=[1.9 -0.9 0.00001]T,P(0)=104×I3×3,遗忘因子?孜=0.999。给定q轴电流为正弦输入下,观察转速输出曲线,如图3所示。辨识得到的特征参数曲线如图4所示。
由图3可以看出,超高速永磁同步电机矢量控制系统传统模型转速输出曲线和特征模型下的转速输出曲线基本一致,由此验证了特征模型的有效性。
5 结论
超高速永磁同步电机在高速状态下,其转子动力学特性以及电气特性与常规电机不同,需要考虑的非线性因素较多,采用普通电机建模的方式并不合适,因此采用特征建模理论,将复杂的系统模型用特征模型代替,将未知且难以描述的非线性因素压缩在几个特征参数中,不仅简化了控制器设计,而且又不丢失系统信息。仿真结果表明特征模型可以用于超高速电机系统。
参考文献:
[1]鲍海静,梁培鑫,柴凤.飞轮储能用高速永磁同步电机技术综述[J].微电机,2014,47(2):64-72.
[2]陈小安,刘俊峰.高速电主轴热态性能及其影响[J].机械工程学报,2013,49(11):135-142.
[3]S. Lin, T. X. Wu, L. Zhou, et al. Modeling and Design of Super High Speed Permanent Magnet Synchronous Motor (PMSM)[C]//2008 IEEE National Aerospace and Electronics Conference, Dayton, OH, 2008: 41-44.
猜你喜欢
中国人口·资源与环境(2016年11期)2017-02-17
财经理论与实践(2016年6期)2017-02-09
价值工程(2017年2期)2017-02-06
汽车科技(2016年5期)2016-11-14
科技视界(2016年23期)2016-11-04
科学与财富(2016年28期)2016-10-14
科技视界(2016年24期)2016-10-11
中国市场(2016年29期)2016-07-19
电脑知识与技术(2016年14期)2016-06-30
软科学(2015年9期)2015-10-27