浅谈SLAM(惯导)便携式扫描系统在大屯锡矿井下扫描中的应用
2020-10-30 15:16李庆
世界有色金属 2020年16期
李 庆
(云南锡业股份有限公司大屯锡矿,云南 个旧 661000)
建立矿区内各项工程的数据库及三维模型是建设数字化矿山的基础,而井下巷道三维建模是矿床三维建模的重要组成内容,也是实现井下巷道可视化表达的重要方式。近年来,随着采矿方法的变革及高效设备的运用,充填采矿法已成为三坑主要生产方式。但传统的测量方式存在效率低、误差较大、不能准确反映进路空间形态等问题日益凸显,如何快速、直观、准确地反映井下各类工程的形态及其空间关系是矿山测量工作的重要课题。面对这一难题,大屯锡矿通过探索和对比,引进SLAM(惯导)系统便携式扫描系统,对井下各类工程进行扫描(数据采集)。三维扫描仪的用途是收集物体几何表面的点云(point cloud),通过软件将搜集到的数据进行三维重建计算,以创建实际物体的数字模型,越密集的点云可以创建更精确的模型,这个过程称做三维重建。该项技术广泛应用于工业设计、瑕疵检测、逆向工程、地貌测量、医学信息、刑事鉴定、电影制片、游戏创作素材等。
1 现场操作方法
现场收集数据(扫描)质量的好坏直接影响扫描模型的精度,而井下工程扫描由于受空间、环境等特殊因素影响,将SLAM(惯导)便携式扫描系统应用于井下矿山,没有现成的操作规范,一切都处于实验阶段,需要使用者不断去探索、分析和检验,下面将近年来的使用经验总结如下:
1.1 设备连接
SLAM三维激光扫描系统主要由:激光扫描仪、主机设备、电池及充电设备、连接线组成。连接线的两端分别和主机、扫描头的LOMO口连接,电池扣在主机上即可完成安装。
1.2 扫描准备阶段
将扫描仪平置,设备开机之后连接内置的WIFI(密码:zebedee12),通过平板或手机端浏览器输入网址(192.168.102.2)进入控制截面,创建文件后开始工程扫描。网页可实时显示点云数据,实时解算点云数据,实时显示移动轨迹,采集完成后,点击STOP停止扫描。具体操作为:
(1)连接WIFI(geoslam-rt)-----密码zebedee12。
(2)按下开机键并将扫描仪平置。
点击NEW SCAN在输入扫描工程名称前,使扫描头保持水平放置,并保持静止;在特殊环境下使用手掌托着尽量保持静止即可。
(3)打开UC浏览器,输入登录网址-----192.168.102.2。
新建扫描任务(如下图所示:文件名以时间+矿体名称+分层构成)

图1 任务创建
1.3 现场扫描
(1)打开扫描头按钮,待系统初始化完,拿起扫描仪进行扫描作业。

图2 扫描现场
(2)扫描路径根据需要可布设为按闭合路线、不闭合路线、支导线线路进行扫描。若巷道形态复杂、需要精确计算巷道体积、采场控制系统不完善时采用闭合线路;一般情况下,采用不闭合线路(需要精确体积的采用往返扫描);扫描时选用的像控点应尽可能均匀分布于扫描区域而且需要注意选用像控点的图形形状(等边形最佳);扫描时需同时扫入不少于3个像控点(控制点),若控制系统不完善或测点分布不均匀时应适当增加像控点数量以提高模型精度;每次扫描长度不超300m,扫描完之后再新建一个文件继续扫描。
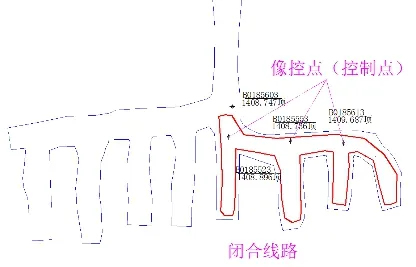
图3 扫描路径中的闭合线路

图4 扫描路径中的不闭合线路
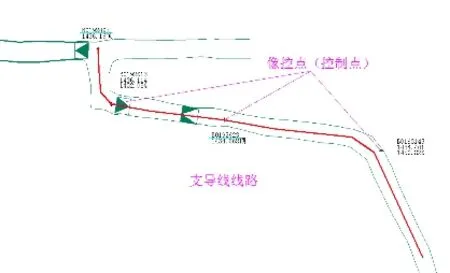
图5 扫描路径中的支导线线路
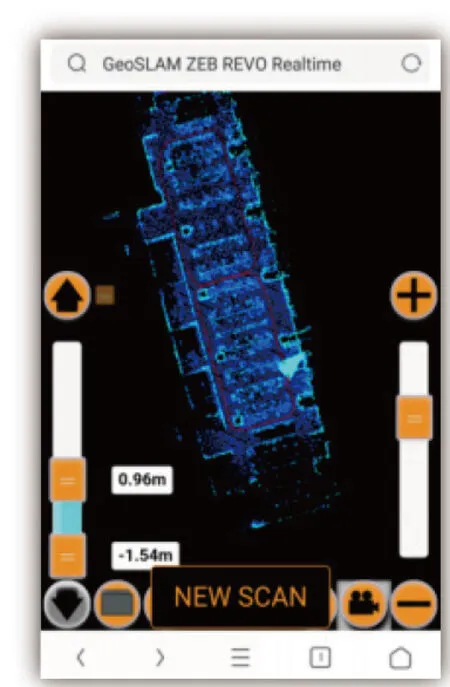
图6 扫描效果图
(3)扫描结束后,点击“STOP”,待数据存储完毕后,检查数据是否可用,确认后方可关机。
2 实例解析
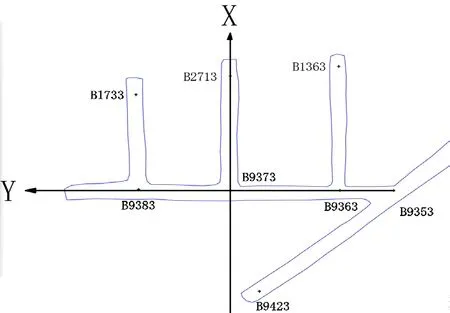
图7 充填采矿法采场
(1)该工程为充填采矿法采场,需要准确的巷道形态和体积,但该处控制系统完备,分析采用不闭合线路进行扫描即可(采矿进路段需往返扫描)。
(2)在对上图巷道进行扫描时,选择控制点应避免使用同一直线上的点,即B9363、B9363、B9373、B9383这四个点中的三个或四个点(这四个控制点都处于Y轴附近),这样主要是为了避免数据处理过后X方向模型的高程出问题。由于立杆和捕捉杆底时不可避免的会存在误差,而这些点间ΔX值较小,这样在匹配时X方向上的巷道高程误差=刺点高程误差/点选用控制点间ΔX值*扫描巷道的ΔX值(上图B1363点处的高程误差≈0.03/0.7*35≈1.5米),即随着巷道在X方向上的延伸巷道高程上的误差就会增大。所以扫描时控制点的选择应避免全部使用同一条线上的测点。
(3)选用的控制点应均匀分布。如上图最佳的控点应选择B09423、B9353、B9383、B2713,这些测点均匀的分布在扫描范围内,可最大限度的减小巷道模型的误差。条件允许的话,尽量避免选择控点只在扫描区域的一侧,例如选择B9423、B9353、B9363这种情况发生,这样离选用控点越远,生成巷道模型的误差就越大,如上图中B9383、B1733点附近巷道的误差较大。
扫描结束后需检查数据完整性和可靠性。
3 结论
扫描模型的精度主要取决于现场扫描质量的好坏,通过分析待扫描工程性质、用途及控制系统的布设情况,选用最佳的扫描路径、最佳控制网(像控点)以保证扫描模型的精度。扫描数据经过计算机处理后,结合Dimine等三维软件可快速重构出被测物体的三维模型,所以手持式三维激光扫描仪又称实景复制技术,它突破了传统的单点测量方法,具有体积小、重量轻、操作简单、拆装方便、高效率、高精度的优势,能够在复杂的空间对被测物体进行快速扫描测量,自动存储、计算,近期以来,通过测量技术人员的不断探索和实验,手持式三维激光扫描仪在大屯锡矿三坑各个矿体的推广应用,标志着大屯锡矿测量技术向前迈进了巨大一步。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
铁道勘察(2021年6期)2021-12-27
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
安全(2015年6期)2016-01-19
中国动物保健(2015年4期)2015-10-21