基于改进型ASRCKF算法的锂离子电池荷电状态估计
2020-11-07 03:31步传宇姜昆任军王凯
广东电力 2020年10期
步传宇,姜昆,任军,王凯,3
(1.青岛大学 电气工程学院,山东 青岛 266071;2.胜利油田石油开发中心有限公司,山东 东营257000;3.电动汽车智能化动力集成技术国家地方联合工程研究中心(青岛),山东 青岛 266071)
传统燃油汽车为人们的日常出行带来了巨大便利,但也加剧了化石能源的迅速消耗,其排放的尾气中含有一氧化碳、二氧化硫和含铅化合物等污染物,对环境与人体健康造成了危害。随着人们环保意识的提高,以及可持续发展理念的不断推进,具有环保和节能优点的新能源电动汽车日益普及。蓄电池作为电动汽车的动力来源,成为制约其发展的核心与关键。与铅酸电池相比,动力锂电池具有能量密度高、充电速度快、绿色环保和循环寿命长等优点,受到人们的广泛关注,在电动汽车领域得到了迅速发展[1-5]。
为了更加充分且安全可靠地使用动力锂电池,实时监测电池运行状态的电池管理系统(battery manage system,BMS)必不可少。电池荷电状态(state of charge,SOC)估计是BMS的核心功能之一,准确的SOC估计有助于提高BMS的管理效率,防止因过度充放电而导致电池内部结构损坏,延长动力锂电池的循环寿命,从而降低电动汽车成本[6-9]。然而,动力锂电池作为具有强非线性和时变特性的复杂多元系统,对其进行准确的SOC估计具有一定的难度。
目前,锂电池的SOC估计方法有很多种。安时积分法是一种经典简单的方法,通过对电池的工作电流和时间进行积分来得到电池放出的电量,从而得到电池的SOC值[10];然而安时积分法需要给出精确的SOC初值,并且随着时间累积,电流测量误差导致的估算误差也会逐渐累积,造成后期估算失准。开路电压法同样极为简便,且具有较高的估算精度,其通过开路电压(open circuit voltage,OCV)与SOC之间的函数映射关系来对SOC进行估算[11];然而开路电压法需要长时间静置电池,使电池端电压与OCV近似相等,不适用于SOC的实时在线估计。
近年来神经网络、模糊逻辑以及卡尔曼滤波类算法等新型算法受到众多研究者的关注。神经网络算法模拟脑神经元组成自适应非线性动态模型来估计电池的SOC值,后期运行极为方便;然而前期需要大量符合目标电池工作特性的准确数据和大量时间对模型进行训练,耗时且繁琐[12-14]。相比之下,模糊逻辑算法用于电池的SOC估算,对样本的要求较低;但模糊规则的专家库需要人为设计,无演化能力,对于模糊逻辑算法仍然需要大量的探索[15]。卡尔曼滤波类算法不依赖于大量训练数据,同时具有较高的估计精度和良好的鲁棒性,在电池SOC估计领域得到了广泛研究与发展。
卡尔曼滤波类算法中,扩展卡尔曼滤波器(extened Kalman filter,EKF)最早被发明并应用于电池SOC估计。EKF通过一阶泰勒展开将非线性方程线性化,并忽略高阶项;然而应用于电池SOC估计这一强非线性系统会导致较大的线性化误差,降低估计精度,同时存在雅克比矩阵计算困难的问题[16-17]。相比之下,无迹卡尔曼滤波器(unscented Kalman filter,UKF)采用无损变换(unscented transformation,UT)对非线性函数的概率密度分布进行近似,用一系列加权样本逼近状态的后验概率密度,既避免了线性化过程中舍弃高阶项造成的估计误差,也避免了繁琐的雅克比矩阵计算[18-20]。UKF的滤波精度可以达到三阶,并具有更高的稳定性;然而UKF也存在不足,当状态维数增高时会导致运算量迅速增大,造成维数灾难,同时滤波精度下降。2009年,I.Arasaratnam和S.Haykin 提出了容积卡尔曼滤波器(cubature Kalman filter,CKF),使用球面-径向容积准则对后验概率密度函数进行积分,容积点的取值较UKF中Sigma点的取值更具科学性[21]。当系统状态维数超过三阶时,CKF算法较UKF算法具有更高的滤波精度和稳定性。袁鑫将平方根滤波与CKF算法相结合,组成平方根容积卡尔曼滤波器(square-root cubature Kalman filter,SRCKF)来估算电池SOC,保证了状态协方差矩阵的非负定性,提高了滤波器的计算效率和稳定性[22]。帅孟超将强跟踪滤波算法与CKF算法相结合,组成强跟踪容积卡尔曼滤波器(strong tracking cubature Kalman filter,STCKF),提高了电池SOC估计中算法应对电池状态突变的能力[23]。
本文针对先验噪声统计特性未知或不准确情况下SRCKF算法滤波精度降低乃至发散的问题,将改进型Sage-Husa自适应滤波器与SRCKF相结合,提出一种改进型ASRCKF算法对锂电池SOC进行估算,使用有偏噪声估值器对过程噪声和观测噪声协方差进行自适应迭代更新,以提高SOC估计精度和算法的鲁棒性。
1 锂电池模型
1.1 电池模型建立
等效电路模型是BMS中应用最为广泛的电池模型,常见的等效电路模型有Rint模型、Thevenin模型、PNGV模型和GNL模型等。本文选取二阶Thevenin等效电路模型,在电池外部动态特性和内部微观特性之间提供了一个很好的权衡,可以获得准确的实时模拟结果,同时具有较简单的计算过程[24-25]。二阶Thevenin等效电路模型如图1所示。图1中:Uoc为开路电压;UL为电池端电压;iL为电池的输出电流;R0为电池的等效欧姆内阻;R1和C1的并联回路表征锂离子在电极间传输时遇到的阻抗;R2和C2的并联回路表征锂离子在电极材料中扩散遇到的阻抗。
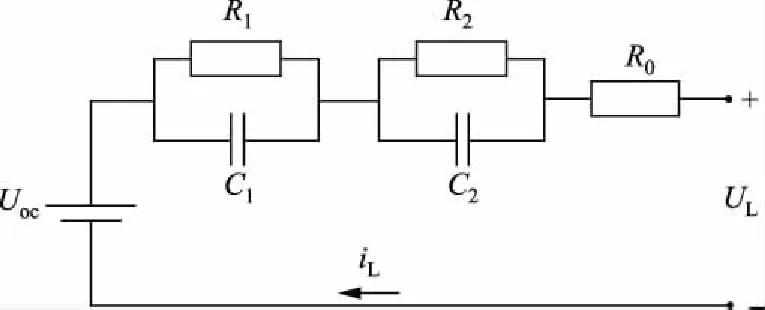
图1 锂离子电池二阶Thevenin等效电路模型Fig.1 The second-order Thevenin equivalent circuit model of Li-ion battery
以U1和U2分别作为2个RC回路的端电压,则由戴维南定理可得:
Uoc=iLR0+U1+U2+UL,
(1)
(2)
(3)
Uoc是关于SOC(其值表示为SSOC)的函数。以电池的端电压UL为观测量,则由式(1)可得二阶Thevenin等效电路模型的观测方程为
UL,k=Uoc(SSOC,k)-U1,k-U2,k-R0iL,k+rk.
(4)
式中:rk为观测过程产生的均值为0、方差为R的高斯白噪声;用下标k表示变量在k时刻的值,下同。
式(2)和(3)经离散化可得:
(5)
式中ΔT为1个采样周期的时长。
电池SSOC的函数关系通过改进的安时积分法得到
(6)
式中:t0为放电初始时刻;t为放电开始至结束过程中任一时刻;βT为电池容量修正系数;C0为电池单次循环的最大可用容量;η为库伦效率。将式(6)离散化可得
(7)
式中QN为电池额定容量。
将SSOC和2个RC回路的端电压U1和U2作为系统的状态变量,即x=[SSOCU1U2]T,则二阶Thevenin等效电路模型的状态方程为
(8)
式中wk-1为系统过程产生的均值为0、方差为Q的高斯白噪声,与观测噪声互不相关。
1.2 电池模型参数辨识
本文选用TESSON18650型锂电池为实验对象,其额定容量为2.2 Ah,额定电压为3.7 V,SSOC为100%。通过放电电流为2.2 A的间歇恒流脉冲放电实验,对电池模型进行参数辨识,单个放电周期为730 s,占空比为24%,每个周期SSOC下降约5%,总测试时长为14 300 s。端电压恢复稳定时进行记录,此时端电压约等于电池电动势。脉冲放电测试曲线如图2所示。
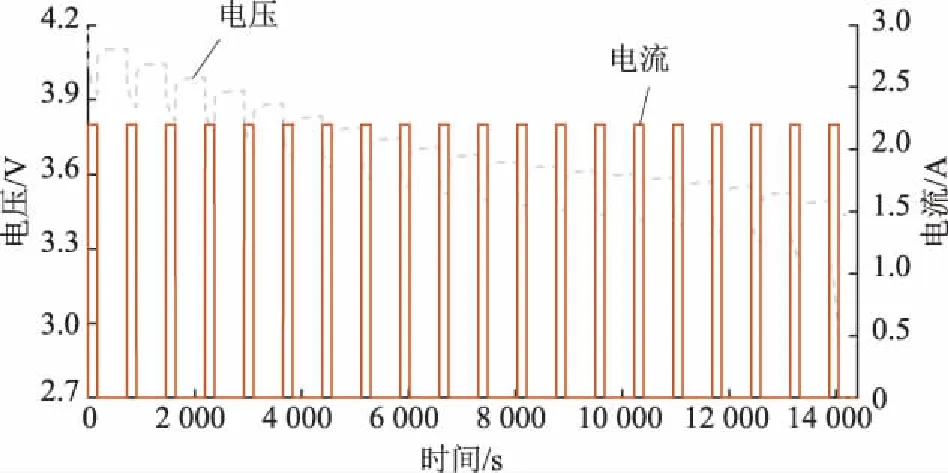
图2 锂离子电池脉冲放电测试Fig.2 Pulse discharging test of Li-ion battery
对于记录的稳定后的端电压与SSOC,使用MATLAB进行七阶多项式拟合,可得拟合式(9),拟合结果如图3所示。
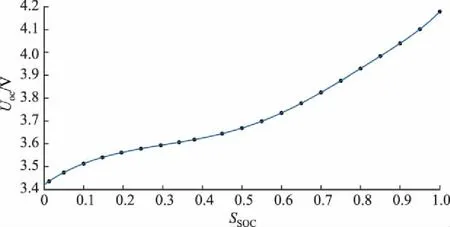
图3 OCV与SOC关系曲线Fig.3 Relationship curves of OCV and SOC
1.28SSOC+3.42.
(9)
对各电阻电容的参数辨识,选取SSOC为90%时的端电压曲线进行说明,如图4所示。
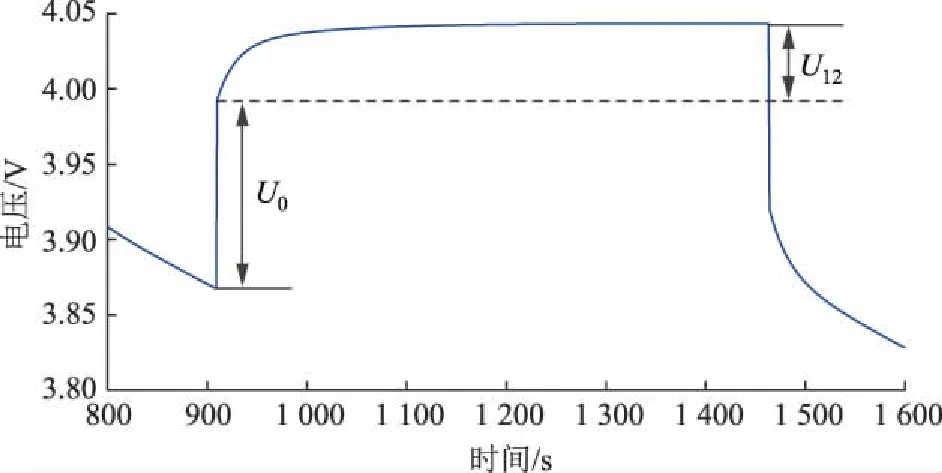
图4 SSOC为90%时端电压曲线Fig.4 Terminal voltage curve as SSOC=90%
图4中约900 s处时放电停止,电压瞬间产生U0段的回升变化,是由欧姆内阻R0引起的。根据欧姆定律可求得
R0=U0/iL.
(10)
约900~1 470 s期间缓慢变化的电压U12段是由2组并联RC回路引起的,在此过程中,端电压的输出方程为
UL=Uoc-R0iL-R1iL(1-e-t/τ1)-R2iL(1-e-t/τ2).
(11)
式中时间常数τ1=R1C1,τ2=R2C2,且τ1<τ2。
使用指数函数拟合求取该时刻下SSOC对应的各电阻电容参数值,选用公式为
U=k0+k1e-t/τ1+k2e-t/τ2.
(12)
式中k0对应稳定后的开路电压Uoc,k1对应式(11)中的-R1iL,k2对应式(11)中的-R2iL,则R1、C1和R2、C2求取如下:
(13)
将各SSOC对应的R0、R1、C1、R2和C2参数辨识完成后,同样使用MATLAB拟合出各个参数关于SOC的动态曲线,为改进型ASRCKF算法提供较为准确的电阻电容数据。
1.3 电池模型验证
对于辨识完成的电池电阻电容参数,采用恒流放电工况对参数辨识的精度进行验证。恒定电流设定为2.2 A,实测电压与仿真电压的波形曲线及电压误差如图5所示。
由图5可知,电池开始放电时,其内部电化学反应的不稳定性导致初始时刻的电压误差较大。随着放电过程逐渐稳定,电压绝对误差维持在0.02 V以内,满足模型需要,验证了参数辨识结果的可靠性。
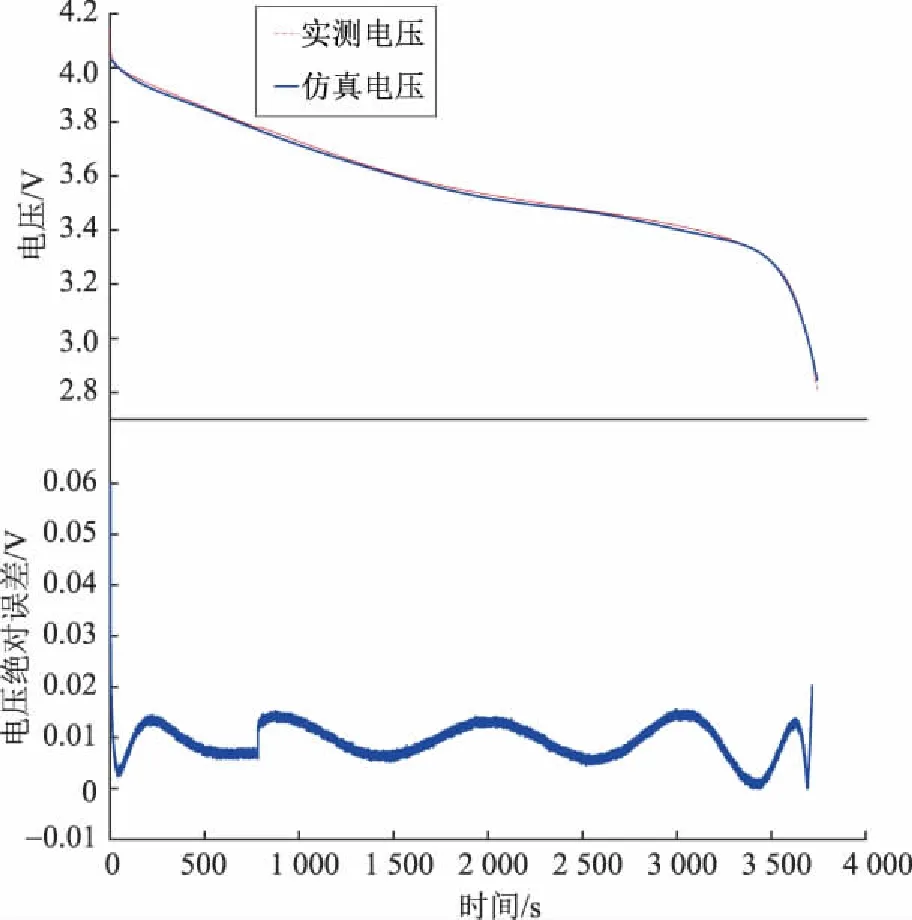
图5 电压波形及电压绝对误差曲线Fig.5 Voltage waveform and voltage absolute error curve
2 改进型ASRCKF算法
2.1 平方根容积卡尔曼滤波
SRCKF算法通过QR分解,采用状态协方差矩阵的平方根代替原协方差矩阵进行运算更新,避免了CKF算法运行过程中协方差矩阵cholesky分解不正定的情况,提高了算法的滤波精度与数值稳定性。SRCKF算法的具体步骤如下。
步骤1,将状态变量x0及其协方差矩阵P0的平方根S0初始化:
(14)
式中:E为求取数学期望函数;Dchol为cholesky分解函数。
步骤2,计算k-1时刻容积点:
(15)

(16)
式中:n为状态向量维度;m为容积点个数,是状态向量维度n的2倍;I为单位矩阵;用下标i表示矩阵的第i列,下同。
步骤3,计算状态方程传播容积点:
xk/k-1,i=f(xk-1,i,uk-1).
(17)
式中f为状态方程,用下标k/k-1表示变量在k-1时刻和k时刻的中间估计值,下同。
步骤4,计算状态量预测值和协方差平方根预测值:

(18)
式中:Q为系统噪声协方差;SQ为系统噪声协方差平方根;γk/k-1为临时变量;DTria(·)为QR分解。
步骤5,更新容积点:
(19)
步骤6,根据测量方程传播容积点,g为测量方程:
(20)
式中yk/k-1,i为测量预测值。
步骤7,对测量预测值加权求和,并求测量误差协方差平方根以及互协方差:
(21)

步骤8,计算卡尔曼增益,更新最优状态值与状态协方差平方根:
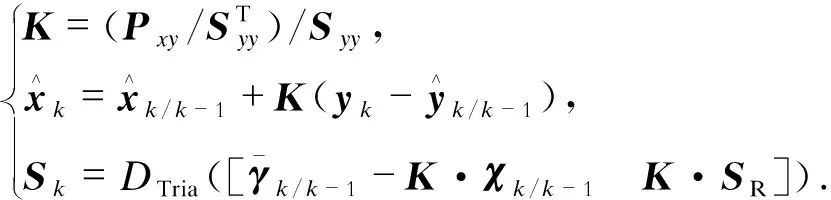
(22)
式中:K为卡尔曼增益阵;yk为k时刻的实际观测值。
在调整值尽量向0逼近以后,我们将用一个最大的范围窗口τi涵盖所有的调整值,图6描述了这个过程,范围窗口在x轴上滑动.因为y轴代表了在所有采样中相应的调整值,范围窗口涵盖的调整值就是在这个窗口内所有调整值的总和.为了提高芯片的良率,我们选用可以涵盖最大数量调整值的范围窗口.这样的话,调整值范围的下限由最小值决定.
2.2 改进型Sage-Husa自适应滤波
使用不精确的先验噪声统计设计卡尔曼滤波器,容易导致状态估计误差增大,乃至滤波发散。为了解决这一问题,产生了应用于噪声统计估计的自适应滤波器。其中,Sage和Husa提出的极大后验估值器应用较为广泛,适用于一般的非线性系统,计算简单,极具实用性。赵琳在此基础上使用渐消记忆指数加权的方法,推导出了次优无偏时变噪声统计估计器的一般形式[26-28],推广至平方根容积卡尔曼滤波器,计算公式如下:
(23)
(24)
(25)
(26)

由于式(24)和(26)中存在减法运算,容易使得过程噪声和观测噪声协方差矩阵失去半正定性或正定性,导致滤波发散[29]。因此,本文采用有偏噪声估值器代替原无偏噪声估值器进行运算,公式(24)和(26)变为:
(27)
(28)

图6 改进型ASRCKF算法流程Fig.6 Flow chart of improved ASRUKF algorithm
3 仿真实验
利用Simulink仿真平台,对搭建好的电池模型在恒流放电工况和混合动力脉冲能力特性(hybrid pulse power characteristic,HPPC)循环工况下进行仿真实验,使用改进型ASRCKF算法和SRCKF算法分别估计电池SOC并对比结果,以验证算法的有效性,其中,SOC参考值在放电实验时由安时积分法得到。
3.1 估计精度对比实验
首先在恒流放电工况下进行算法对比分析,仿真实验结果如图7所示,2种算法的误差特征值对比见表1。
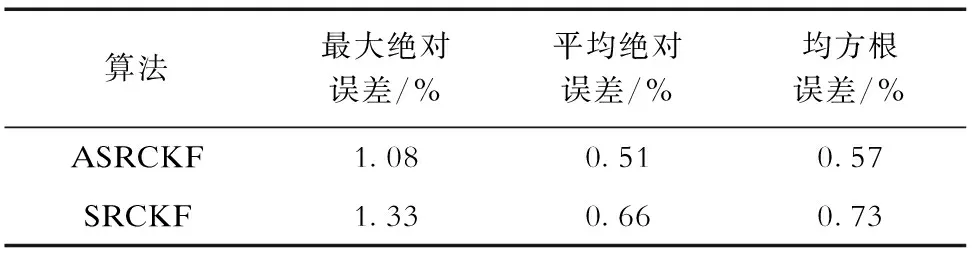
表1 恒流工况下误差特征值对比Tab.1 Comparison of error eigenvalues in constant current condition
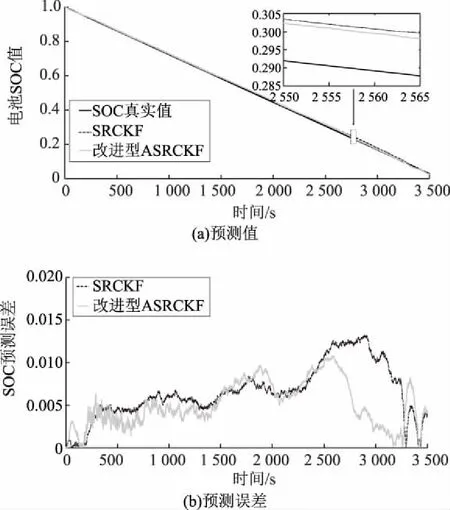
图7 恒流工况下SOC预测值及预测绝对误差Fig.7 SOC prediction values and absolute values of prediction error in constant current condition
由仿真实验结果可知,在恒流工况下,2种算法都具有较高的滤波精度,最大误差均不超过1.4%。
这是因为恒流工况下电流稳定,电池模型过程噪音较小。然而,电动汽车动力锂电池的实际运行情况较为复杂,电流变化往往较为剧烈;因此,接下来在HPPC循环工况下进行估计精度对比,共设定12个循环周期。在HPPC循环工况中,单个周期的电流情况如图8所示,HPPC循环工况下的仿真实验结果如图9所示,2种算法的误差特征值对比见表2。
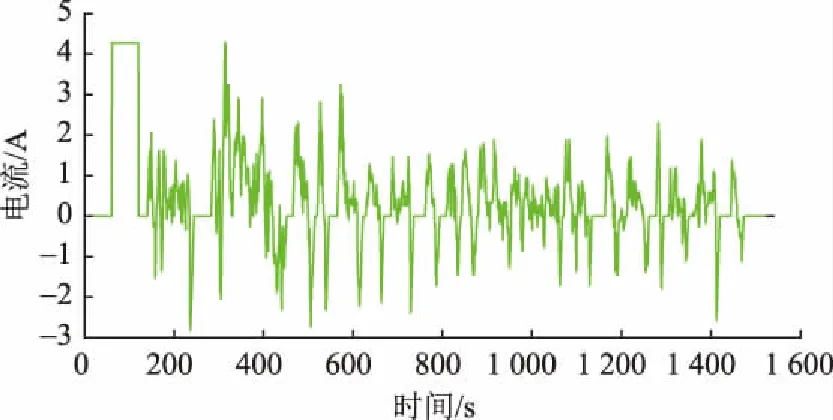
图8 HPPC工况单个周期的电流情况Fig.8 Current situation of single cycle in HPPC
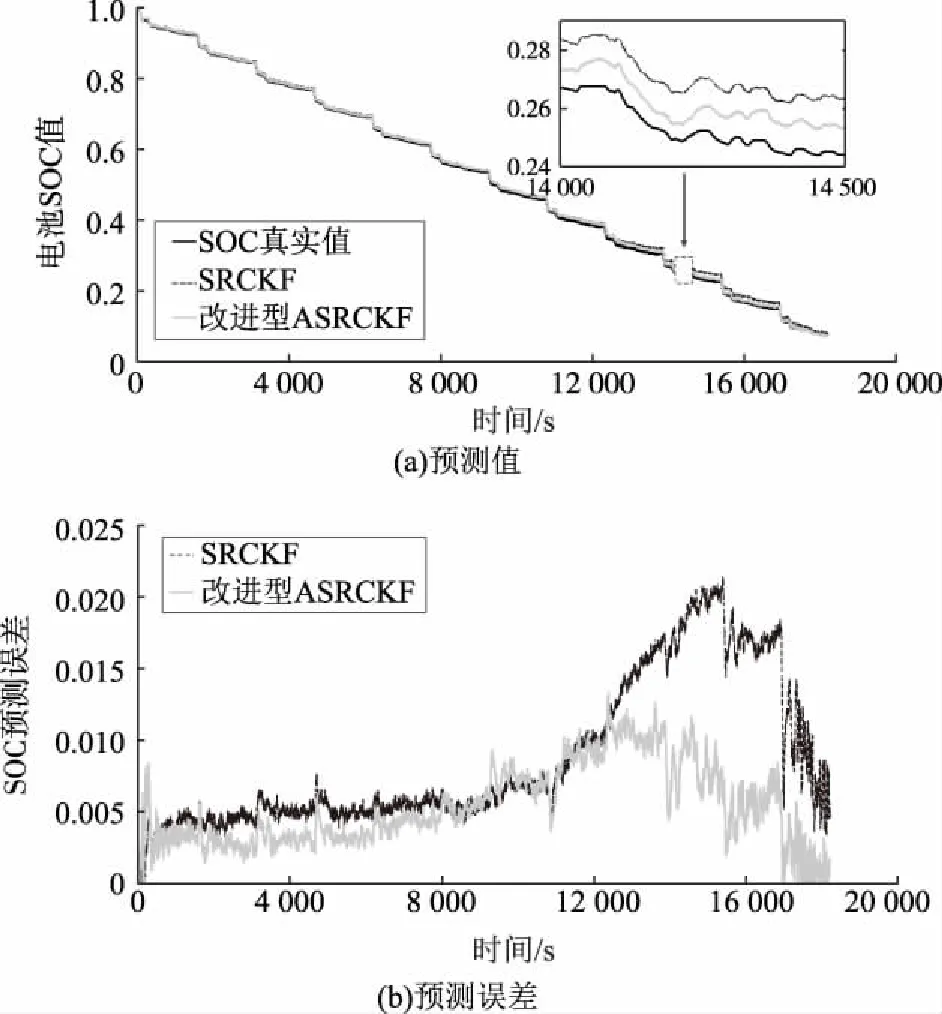
图9 HPPC工况下SOC预测值及预测绝对误差Fig.9 SOC prediction values and absolute values of prediction error in HPPC condition

表2 HPPC工况下误差特征值对比Tab.2 Comparison of error eigenvalues in HPPC condition
由仿真实验结果可知,在电流变化剧烈的HPPC循环工况下,由于电池模型噪声增大,导致SRCKF算法的估计精度下降,最大估计误差超过了2%;而改进型ASRCKF算法的估计精度变化较小,最大估计误差仍然不超过1.4%。这是由于有偏噪声估值器对过程噪声进行了自适应校正,使得改进型ASRCKF算法具有更高的估计精度和鲁棒性。
3.2 收敛性对比实验
在电动汽车动力锂电池的真实运行中,给出的SOC预测初值与SOC真实值可能存在偏差,此时算法的收敛速度快慢是影响SOC估计的重要指标。算法收敛速度越快,收敛后误差越小,算法性能越优异。本文在较为复杂的HPPC循环工况下对算法的收敛性进行验证,将2种算法的SOC预测初值均设定为0.7,SOC真实值为1,即具有30%的较大初始误差。仿真实验结果如图10所示,收敛性评价指标见表3。
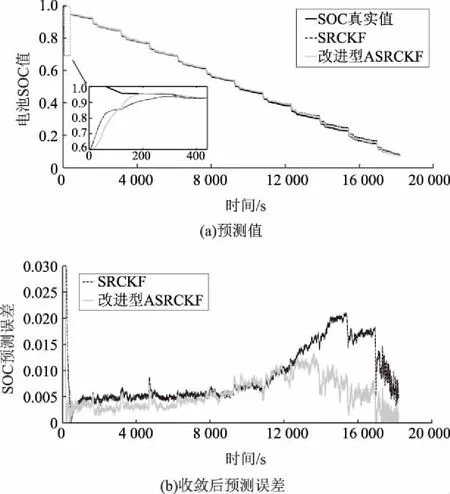
图10 SOC预测值及收敛后预测绝对误差Fig.10 SOC prediction values and absolute values of prediction error after convergence
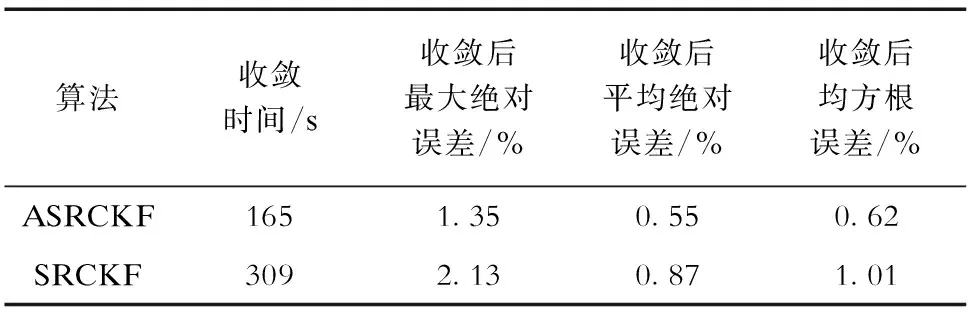
表3 收敛性评价指标Tab.3 Convergence evaluation index
由仿真实验结果可知,改进型ASRCKF算法在约165 s时完成收敛,而SRCKF算法在约309 s时完成收敛,改进型ASRCKF算法的收敛速度提高近1倍。同时注意到,2种算法在SOC预测初值存在偏差时,收敛后的估计精度与初值无偏差条件下的估计精度均无明显差异。这是由于卡尔曼滤波器是一种最优化自回归数据处理器,初始误差对于完成收敛后的状态预测无影响[30]。
以上仿真实验对比表明,改进型ASRCKF算法通过有偏噪声估计器对电池噪声进行自适应校正,与SRCKF算法相比具有更高的估计精度和鲁棒性,同时具有更好的收敛性。
4 实验测试
TESSON18650型锂电池的测试平台由TR9600可编程直流电子负载、计算机和dSPACE MicrolabBox实验箱组成,测试平台如图11所示。

图11 锂离子电池测试平台Fig.11 Testplatform of Li-ion battery
在设定好的动态放电工况下进行算法对比分析,放电电流为在0.5 A与1 A间切换的方波电流,周期为2 s,占空比为50%。实验测试结果如图12所示,2种算法的误差特征值对比见表4。

表4 动态放电实验下误差特征值对比Tab.4 Comparison of error eigenvalues in dynamic discharge experiment
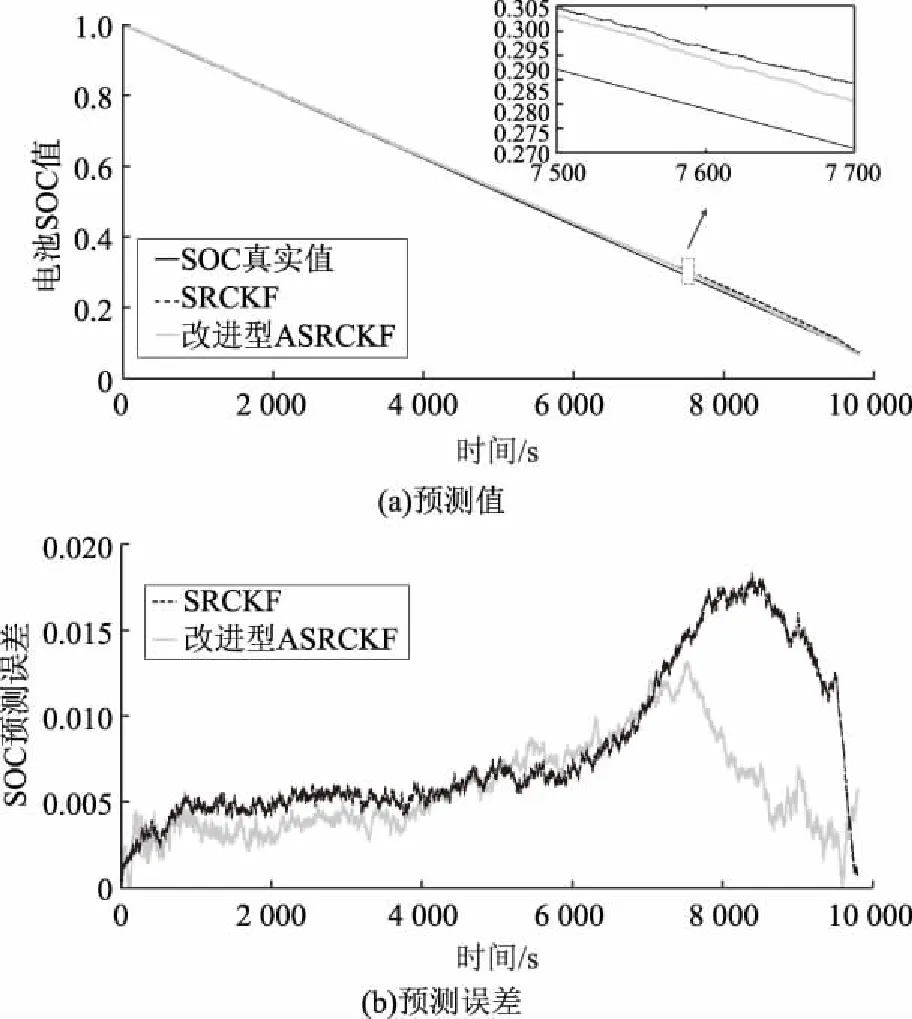
图12 SOC预测值及预测绝对误差Fig.12 SOC prediction values and absolute values of prediction error
动态实验放电结果表明:在实际应用中,改进型ASRCKF算法相比于SRCKF算法具有更高的滤波精度,进一步验证了算法的实用性。
5 结论
本文将改进型Sage-Husa自适应滤波算法与SRCKF算法相结合,提出了一种改进型ASRCKF算法,采用有偏噪声估值器对系统噪声和观测噪声协方差进行自适应迭代更新,保证了协方差矩阵的非负定性。根据仿真实验结果对比可以得出以下结论:
a)在不同工况下估计锂电池的SOC时,改进型ASRCKF算法估计误差均保持在1.4%以内,证明该算法具有较高的滤波精度;
b)在更贴近电动汽车动力锂电池实际运行情况的复杂工况下,改进型ASRCKF算法的滤波精度明显高于SRCKF算法,说明该算法具有更强的鲁棒性;
c)当SOC的预测初始值存在较大误差时,改进型ASRCKF算法具有更快的收敛速度,验证了算法具有良好的收敛性。
综合可得,改进型ASRCKF算法具有估计精度高、鲁棒性强和收敛性佳等优点,应用于电动汽车动力锂电池的SOC估算具有较强的实用性。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年23期)2019-02-23
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年20期)2017-04-26
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
轻兵器(2016年20期)2016-10-28