基于ADMM的电-气综合能源系统多目标最优能量流分布式计算
2020-11-07 03:31黄琳妮郑宝敏殷林飞
广东电力 2020年10期
黄琳妮,郑宝敏,殷林飞
( 1.广东电网有限责任公司东莞供电局,广东 东莞 523007;2.广西大学 电气工程学院,广西 南宁 530004)
在气候变化、能源安全等全球性问题背景下,低碳生产已成为全球经济的主要趋势。其中,在能源供应领域,天然气相较于煤炭等产生污染更少,热效率更高,因此在一次能源发电中的占比逐年攀升[1-3]。天然气系统与传统电力系统互联组成的电-气综合能源系统是当前较为典型的能源互联网形式之一,可以有效实现能量互补和梯级利用。随着二者之间的耦合不断加强,对2个不同系统之间的相互作用机理以及电力潮流和天然气流的协同优化方法进行研究,具有越来越大的现实意义[4-6]。
目前,国内外已有许多学者对耦合的电力潮流和天然气流的协同优化进行了大量研究。文献[7]考虑了不同能源系统之间的耦合,基于能源枢纽的新概念,推导出稳态功率流模型和多种能源载体最优调度的一般性条件;文献[8]提出了天然气与电力最优潮流相结合中天然气负荷流量、压缩机站耗气量等问题,描述了电-气互联系统在组合节点(即发电机)处的气体和电网之间的能量转换等式约束;文献[9]建立了电-气互联系统的蒙特卡罗模型,将气网和电网集成到单个蒙特卡罗序列中,以天然气供应、储气运营和发电成本等天然气和电力网络的综合成本为目标,进行综合能源系统的可靠性分析。
上述优化方法中通常引入1个联合调控中心作为统一调控电-气耦合系统的决策机构,采用的决策方法称为集中式优化算法;然而该种设计忽略了电网和气网通常由不同的运营商和调控中心进行调管,集中优化算法同时也带来了如何建立联合调控中心、确定主导运营商、获取全局信息和防范信息泄露等多种困难[10]。电-气综合能源系统的调控决策往往同时追求可靠性、经济型等多个目标,而目前针对此的多目标优化计算仍较为匮乏,基本都局限于考虑单个目标[11-12]或将多个目标简单加权[13]。
在优化过程中,由集中式优化算法大规模数据传输导致的带宽限制、传输误码和信息泄漏等各种问题,可通过采用分布式优化算法得到解决。分布式优化就是将大型的优化问题分解为若干子优化问题,分别计算各子优化问题从而得到原优化问题的解,进而减小计算内存;而作为其中重要的一种方法,交替方向乘子法(alternating direction method of multipliers, ADMM)[14]最早由Gabay和Mercier于1976年提出,在大规模数据分析处理领域(如统计学习、语音识别、图像处理[15]等),因具有处理速度快、收敛性能好等良好表现而备受关注,已被广泛应用于电力系统分布式最优潮流优化[16]、经济调度[17-18]和无功优化[19]等多个领域。
为了实现电-气综合能源系统多目标优化问题的分布式求解,本文提出一种基于 ADMM[20]的电-气能流分布式多目标优化算法。该算法不需要设置联合调控中心,采用分布式计算的模式对综合能源系统进行优化调控,并采用模糊处理的方法对多个优化目标进行综合求解,既能较为全面地实现多个优化目标的协调兼顾,有效避免集中优化方法的技术缺点,同时也可有力防范各系统运行信息的泄露,这在当前网络安全问题日益凸显的环境下显得尤为意义重大。
1 电-气综合能源系统能流优化模型
多能流优化模型采用由电网和气网互联组成的电-气综合能源系统,其中,电流和气流分别在电力系统和天然气系统中流动,并通过燃气轮机和电转气装置(power to gas, P2G)之间的耦合作用在2个系统之间进行转换,如图1所示。在电-气综合能源系统中,电网约束主要考虑交流潮流约束以及常规的机组出力、节点电压和线路容量上下限等约束。

图1 电-气综合能源系统Fig.1 Electric-gas integrated energy system
1.1 气网潮流约束
气网的潮流约束主要包括以下约束:
a)输气管道气流方程约束。考虑Weymouth方程,管道气流与两端的气压满足
(1)
式中:ΠGN为天然气网络的节点集合;fij,t为管道ij在t时段的气流量;si,t和sj,t分别为节点i和j在t时段的气压变比;si,min和si,max分别为节点i在t时段的气压变比下限和上限;hij为管道ij的特性参数。
b)加压站约束。在天然气系统中通常配备若干加压站装置,其作用是维持管道中的天然气压,防止管道摩擦阻力导致气压降低。加压站的出力需满足损耗约束和加压变比上下限约束,即
(2)
式中:Πcom为加压站集合;fcom,g,loss,t为加压站g维持正常工作在t时段所需的气流损耗;fcom,g,in,t、fcom,g,out,t分别为加压站g在t时段气流输入和输出;fcom,g,max为加压站g气流输入和输出最大值;rcom,g,max和rcom,g,min分别为加压站g出气端气压pg,out,t和进气端气压pg,in,t变比的上限和下限。
c)气源和储气库约束。气源的气流输出需满足
fM,h,min≤fM,h,t≤fM,h,max,h∈ΩM.
(3)
式中:ΩM为气源集合;fM,h,t为气源h在t时段的输出;fM,h,max和fM,h,min分别为气源h输出的上限和下限。储气库需满足
(4)
式中:ΩO为储气库集合;dO,k,t为储气库k在t时段的储气量;fO,k,in,t和fO,k,out,t分别为储气库k在t时段的进气量和出气量;dO,k,max和dO,k,min分别为储气库k的储气量的上限和下限;fO,k,out,max和fO,k,in,max分别为储气库k的进气量和出气量的上限。
d)节点流量平衡方程约束。天然气网络各节点需满足流量平衡方程
fM,t+(fO,out,t-fO,in,t)+
fP2G,t-fGT,t-fD,t-BGfL,t=0.
(5)
式中:fM,t、fO,in,t、fO,out,t、fP2G,t、fGT,t和fD,t分别为气源输出、储气库进气、储气库出气、P2G输出、燃气轮机输入及气负荷各节点注入的流量在t时段的向量;BG为节点-管道关联矩阵;fL,t为支路流量在t时段的向量。
1.2 电-气耦合约束
在电-气综合能源系统中,电网和气网的耦合体现在燃气轮机和P2G的输入输出转化方程中,即
(6)
式中:fGT, n,t为燃气轮机n在t时段输入;R2,n、R1,n和R0,n均为燃气轮机n耗量特性参数;PGT,n,t为燃气轮机n在t时段有功出力;PGT,n,min、PGT,n,max分别为燃气轮机n有功出力的下限和上限;PP2G, m,t为第m个P2G的t时段有功输入;ηP2G, m为第m个P2G的转换效率;ϖg为天然气的热值参数;fP2G, m,t为第m个P2G的t时段气流输出;fP2G, m,max为第m个P2G的气流输出上限。
1.3 目标函数
在电-气综合能源系统中,考虑3个目标:经济性目标f1——最小化系统总供能成本;环保性目标f2——最小化系统总碳排放量;削峰填谷目标f3——最小化电-气综合能源系统的净负荷曲线平滑度[21]。
(7)
式中:ΠGC和ΠT分别为燃煤机组和所有时段集合;PGC,i,t为燃煤机组i在t时段的有功出力;ai、bi和ci为燃煤机组i成本系数;χi为气源的成本系数;ΠW为风电场集合;PW0,i,t和PW,i,t分别为风电场i的最大可用有功出力和实际有功出力;δi为风电场i的弃风成本系数;ΠGT、ΠP2G分别为燃气轮机机组、P2G集合;αi、βi和γi为碳排放系数;ζg为加压站、燃气轮机每单位天然气的碳排放值;ψg为P2G每单位天然气的等效碳储存值;fM,i,t为气源i在t时段输出的气流量;PG,i,t为发电机组i在t时段的有功出力,其中,发电机组包括燃煤机组和燃气轮机;T为时段总量;Pnet,t为电网在t时段的净负荷,其计算公式参见文献[21]。
1.4 多目标能量流优化模型
在多目标优化问题中,传统的求解思路是通过赋予各目标值权重来反映各目标的重要程度,而本文采用模糊处理方法,从各单目标模糊最优解的交集中得到多目标φ最优解,即
(8)

2 基于ADMM的多目标最优电-气能量流的分布式计算
为实现电网和气网的2个供能主体的分散自治与协同优化,本文根据ADMM设计了电-气综合能源系统多目标最优能量流的分布式求解算法。
2.1 ADMM
ADMM是一种用于求解具有可分结构的凸优化问题的重要方法,一般用于求解带有等式约束的凸优化问题。以电网a和气网b构成的耦合系统的分布式优化问题为例介绍ADMM的原理:

(9)
式中:f和g分别为电网a和气网b的目标函数;x和y为2个网络通过等式约束进行耦合的决策量。
构建增广拉格朗日函数,根据ADMM可得到式(9)相应的分布式迭代求解方程:
(10)
式中:c为罚参数向量;λ为拉格朗日乘子向量;l为迭代次数,总迭代次数为L;xl为第l次迭代向量x值(其他以此类推)。当方程原始残差rl+1和对偶残差sx,l+1、sy,l+1均小于收敛阈值ε,认为ADMM收敛到最优解。其中:rl+1=‖xl+1-yl+1‖2,sx,l+1=‖xl+1-yl‖2,sy,l+1=‖yl+1-yl‖2由式(10)可以看出,向量x和y是相互交替进行更新,类似于Gauss-Seidel方法。相较于增广拉格朗日乘子法,交替更新法求解更加简便,故广泛应用于实际中。
ADMM的简要计算步骤如下:
步骤1:核对收敛判据,若满足收敛判据,算法收敛,停止计算,(xl,yl,λl)为问题的最优解;若不满足收敛判据,进入步骤2。
步骤2:根据上次迭代过程网络b的计算结果yl,利用式(10)计算网络a的子问题。
步骤3:完成网络a子问题的计算后,根据其计算结果xl+1,利用式(10)计算网络b的子问题。
步骤4:根据式(10)更新拉格朗日乘子变量λl+1。
步骤5:令l=l+1,返回步骤1,进入下一步迭代过程。
2.2 多目标最优能量流分布式计算

(11)
式中:μi,a和μi,b分别为电网a和气网b的第i个目标隶属度(其他依次类推);fi,a,max和fi,b,max为当总目标值为fi,max时网络a、b的目标最大值;fi,a和fi,b分别为电网a和气网b的目标函数;ki,a和ki,b分别为电网a和气网b的隶属参数,具体为:
(12)
式中fi,a,min和fi,b,min分别为当总目标值为fi,min时网络a、b的目标最小值。
(13)

图2 电-气网络分离原理图Fig.2 Electric-gas network separation schematic
参考ADMM的标准求解问题,将式(10)的变量x和y替换为xk,a和xk,b(同理Sx、Sy替换为Sa、
Sb),问题可拆分为电网和气网的2个子优化问题,分别为
(14)
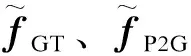
算法的流程如图3所示,具体为:
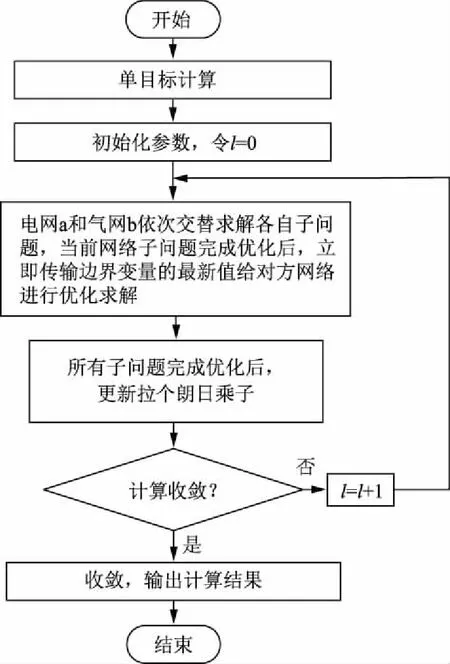
图3 算法流程图Fig.3 Algorithm flowchart
步骤1:初始化参数。令l=0,设置电、气网络变量的初始值xk,a,0、xk,b,0,拉格朗日乘子变量初始值λ0,罚参数c和阈值ε。
步骤2:电网、气网子优化问题交替迭代计算。由气网第l步数据xk,b,l,根据式(14)求解电网子优化问题得到xk,a,l+1,并将结果xk,a,l+1传递给气网;然后,根据式(14)求解气网子优化问题得到xk,b,l+1。
步骤3:收敛判断。当方程原始残差rl+1和对偶残差sa,l+1、sb,l+1均小于收敛阈值ε时,算法收敛并停止计算,由步骤2得到的解即为原问题的最优解,跳转步骤5;否则进入步骤4。
步骤4:更新拉格朗日乘子变量,即λl+1=λl+c(xk,a,l+1-xk,b,l+1),令l=l+1,返回步骤2,进入下一步迭代计算过程。
步骤5:输出计算结果,并结束。
3 算例分析
3.1 仿真算例
从网架规模、网架结构等多方面考虑,本文基于IEEE-39节点电网和Belgian 20节点气网搭建电-气综合能源系统,拓扑结构如图4所示。图4中:天然气系统包含2个气源、4个储气库;电力系统包含2台风电机组、3台燃气机组和5台燃煤机组。发电机组、气源和储气库等相关参数和其他拓扑参数见文献[1]。
黑色线路表示电网拓扑,灰色线路表示气网拓扑。图4 电-气综合能源系统仿真拓扑Fig.4 Simulation topology of electric-gas integrated energy system
为更好地探究实际工程应用中电-气综合能源系统的多目标混合能量流优化性能,本文以1 h为单位时长进行24 h的仿真分析,以验证所提分布式能量流优化算法的有效性。在MATLAB R2016b上编写分布式迭代计算框架,对于电网和气网的子优化问题,调用GAMS 24.4的IPOPT求解器进行求解。
3.2 结果分析
设置初始化算法参数:xa,0=xb,0=0,xk,a,0=xk,b,0=0;令ε为10-3,罚参数c为0.65。在迭代过程中,电网和气网2个子优化问题的求解是交替进行的,故算法收敛时间为2个子问题的计算时间之和。
本文从算法收敛误差、算法收敛性能以及罚参数设置对算法影响的3个方面,对算法性能进行分析。调用IPOPT求解器的内点法求解式(8)得到集中式方法的优化结果,其与所提算法的对比情况见表1。2种算法的多目标最优解值均为0.372;本文算法的迭代步数为62;集中式算法、本文算法的计算时间分别为6.89 s、301.2 s。
由表1中数据分析,可得到以下3个方面的结论。

表1 算法优化结果对比Tab.1 Comparison of optimization results
3.2.1 算法收敛误差
在收敛阈值为10-3的约束下,所提分布式算法与集中式方法的优化结果保持一致,各目标值的计算误差极小,数量级为10-6;由此可见,所提算法可以以极小的计算误差,有效完成电-气综合能源系统多目标能量流的分布式求解,并实现电网和气网的分布式调度。
3.2.2 算法收敛性能
传统的集中式算法所需时间为6.89 s,计算速度较快,而所提算法在收敛阈值为10-3条件下收敛时间为301.2 s,迭代步数为62步,这是由于采用分布式框架所致;但对于电-气综合能源系统的24 h内最优电-气能量流求解,该指标仍在工程允许范围内,并且适当增大收敛阈值(如为10-2)时,计算速度还可进一步提高。
为进一步分析所提算法的收敛性能,画出算法迭代过程中方程原始残差rl和对偶残差sa,l、sb,l的变化曲线,如图5所示。由图5可以看出:方程原始残差和方程对偶残差的收敛曲线整体上都呈快速下降趋势,最终低于收敛阈值,满足收敛条件,故所提算法的解能满足系统设定约束,所求结果为最优。

图5 迭代过程中方程残差变化曲线Fig.5 Equation residual curves during iteration
但需要注意的是:为更好地逼近最优仿真结果,方程原始残差和方程对偶残差二者都应达到收敛精度才可以判定为满足收敛条件,如图5方程原始残差在第30步便已经满足收敛精度;但对偶残差却还未达到收敛精度,故算法继续迭代到62步才收敛。综合来看,在算法的迭代过程中,方程原始残差和对偶残差振荡时间较短,所提算法的收敛速度较快,收敛性能较佳。
3.2.3 算法罚参数的设置对算法的影响
在多次仿真计算过程中分别改变罚参数的大小,将各目标优化结果与集中式优化方法对比后的误差值列于表2中,并据此画出各目标的收敛误差、迭代步数以及算法计算时间随收敛阈值的变化曲线,如图6、图7所示,并可得到以下结论:

图6 目标值误差与罚参数值的关系Fig.6 Relationship between target value errors and penalty parameter values
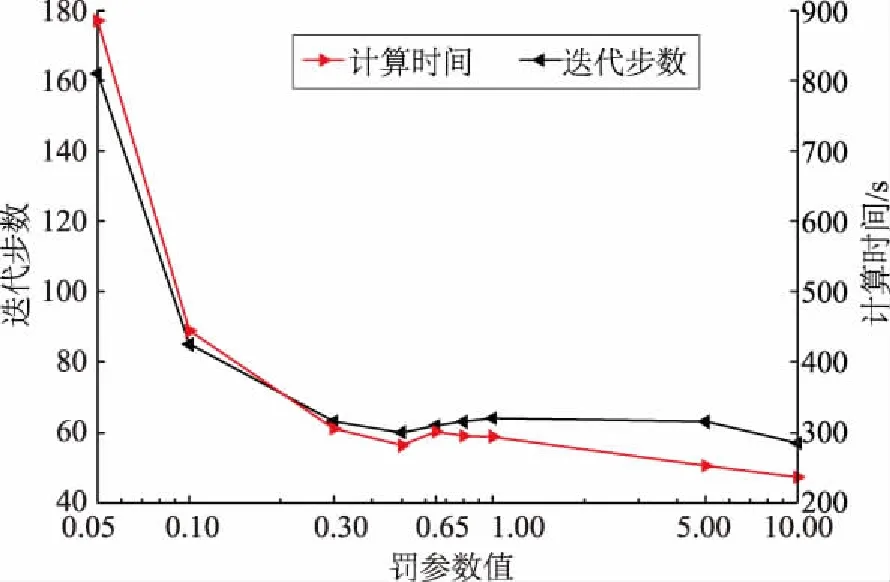
图7 迭代步数、计算时间与收敛阈值的关系Fig.7 Relationship between iteration steps, calculation time and convergence threshold

表2 不同罚参数下的各个目标优化结果Tab.2 Optimization results of each goal under different penalty parameters
a)罚参数的变化会影响算法的计算误差。当罚参数小于1时,算法的计算误差较小,且此时罚参数的变化对计算误差的影响并不大;而当罚参数大于1时,算法的计算误差较大,且误差随罚参数的增大而迅速增大。
b)罚参数的变化会影响算法的收敛速度。当罚参数小于0.1时,算法的迭代步数和计算时间随罚参数的减小而快速增加,此时算法的收敛速度较慢;当罚参数大于0.1时,算法收敛速度较快,且此时罚参数的变化对计算速度的影响并不大。
导致上述结论的主要原因在于:当罚参数增大时,会增大含罚参数项的比重,各子问题朝着使边界耦合方程残差快速减小的方向进行优化,而非朝着使隶属度增大的方向进行,导致最终的优化结果误差增大;而当罚参数较小时,边界方程残差减小的速度降低,算法收敛过程中的震荡时间较长,收敛速度降低,计算时间增加较大。因此,综合考虑算法的计算误差和收敛速度,罚参数的较佳取值范围为[0.1, 1.0]。
4 结论
本文提出一种基于ADMM的分布式计算方法用于求解电-气综合能源系统的多目标最优能量流,并通过仿真算例得到以下结论:
a)所提算法考虑了电力系统和天然气系统的多主体决策特点,采用分布式计算模式有效克服了传统集中式优化存在的带宽限制、传输误码等技术缺点;同时减少信息传输,有效防范信息泄露,所需计算时间能够满足工程实际的要求,实现了电力系统和天然气系统分布自治决策。
b)所提算法可以协调兼顾互联系统运营商对于经济性、环保性、削峰填谷等多个目标的偏好设置,实现电-气综合能源系统能量流的多目标优化;并且,通过选取合适的罚参数值,能够显著提高算法收敛速度,减小计算误差,获得更好的算法综合性能。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
数学大王·趣味逻辑(2021年11期)2021-12-03
北京航空航天大学学报(2020年10期)2020-11-14
基层中医药(2020年7期)2020-09-11
自动化学报(2019年6期)2019-07-23
中国生殖健康(2019年8期)2019-01-07
中国工程咨询(2016年3期)2016-02-13
中国惯性技术学报(2015年1期)2015-12-19
西南军医(2015年5期)2015-01-23
江苏卫生事业管理(2013年5期)2013-03-11