
关于人体起坐支撑的外骨骼装置的结构设计
2020-12-23 02:15陈俊宇宋爱平李博皓刘恒魏俏俏白泽杨
机械工程师 2020年12期
陈俊宇, 宋爱平, 李博皓, 刘恒, 魏俏俏, 白泽杨
(扬州大学 机械工程学院 机械设计制造及其自动化系,江苏 扬州225127)
0 引 言
外骨骼技术是一项目前仍然大多处于实验室阶段的技术,可穿戴外骨骼机器人是一种助行机械装置,可以通过跟踪人体运动为正常人的运动提供动力辅助, 大幅增强人们负载能力和行走耐力,在军事、医疗康复及救灾等方面具有广泛应用前景[1]。当下大部分的外骨骼装置都存在着诸多的技术缺陷和应用困难等问题,难以得到大量的推广和生产。本文设计的人体起坐支撑的外骨骼装置,是一种主体由铝合金构成并且能通过舵机提供动力的助力支撑装置。这种装置不仅能够辅助人体支撑站立、助力行走,还同时安装有坐立辅助支撑装置协助使用者随时坐下。
目前外骨骼装置主要应用于军事和医疗领域[2]。美国在这方面走在了世界前列,主要制造了一些单兵使用的辅助装置,这类装置能帮助战士轻松的奔跑、行走,节省了体力,便于更好地作战。同时通过外骨骼装置也可以方便地携带更多的装备,提高士兵的单兵作战能力。在日本,由于老龄化严重,对这类产品的研究较早,所以有了一些帮助行走的装置,但这些装置大多存在着动力装置沉重、造价昂贵、不方便携带等缺点,难以大规模生产推广。所以大多停留在了实验室验证阶段,只有少量样机进入市场销售。相比之下国内在该领域的研究相对落后。大多国产外骨骼装置只在医用康复领域。因此,目前市场上存在的外骨骼产品大多无法满足市场需求,不能真正地应用到人们的日常生活中去,开发一款轻巧便捷、成本可控、控制多样的实用外骨骼装置势在必行。该外骨骼装置可以运用到各种生产领域,它既可以帮助行走有障碍的人更轻便地行走,也可以为身体健全的人提供随时可坐下休息的服务,同时它也能为生产一线的工人提供更好的劳动保障,减轻人体运动负担,提高生产效益。
基于上述存在的问题,本文提出了一些外骨骼机械装置的实际设计思路和解决方案,在结构方面采用多杆式连接结构。根据三角形的稳定性原理,通过多组三角架结构提高整体装置强度,根据力学模型计算确定装置的实际可行性。本文给出两种不同的连杆设计方案,并在受力特点、机构稳定性等方面进行比较。在控制方面采用Arduino开发板作为主控制板,辅助以传感器,以提高系统灵敏度和精确度,通过蓝牙连接手机APP以实现远程控制,并简要介绍其工作过程和思路。
1 外骨骼机械结构设计及方案比较
外骨骼助力装置主要应用于人体行走助力、辅助支撑坐立方面,它是一种新型的可穿戴助行助力机器人,其主要作用是通过对人体关节施加驱动力,从而有效辅助患有行走功能障碍的患者或下肢肌肉退化的老年人进行独立行走[3]。故需要根据人体外形的具体结构去设计装置的外形。在此设计了两种辅助支撑装置,本文分析它们的不同点,为选择合适的方案作理论铺垫。具体设计研究过程如图1所示。

图1 研究过程流程图
1.1 结构设计
根据外骨骼装置实现功能要求最后确定将装置分为两大部分:助力行走支撑装置和辅助坐立支撑装置。上文所说两种方案的不同之处主要在于后者。而助力行走支撑装置则基本相同。采用铝合金结构,用以减轻装置整体的质量,提高便携程度。在人体腿部两侧通过绑带绑定连接板,整体装置将人体上身自重力传递到腰部支撑板,腰部支撑板由脚部连接杆、大腿连接杆、小腿连接杆、脚部固定板支撑,通过这种外骨骼连接件辅助支撑人体上身部分质量,协助人体站立。腰部支撑板采用柔性材料,上面有多个透气孔,提高佩戴者的舒适程度。在腰部安装有旋转舵机,通过背部的控制芯片来带动旋转舵机运动,以实现助力行走的功能。相对于液压系统,旋转舵机的优势在于可以大大降低装置的整体质量,减轻佩戴者的负担,使装置在使用时更加可靠,同时,旋转舵机所消耗的能源比液压系统装置要少得多,所以只需小功率电池就可以长时间地为装置提供动力。在大腿和小腿后侧安装有辅助支撑板用于帮助使用者坐下时能够将自身重力传递到辅助支撑板上,再通过侧边和后部杆件传递到脚部和撑地部分。
坐立支撑装置有两种不同的方案。第一种如图2所示,在大腿部固定一根连接杆,在后部展开形成一个三角架结构,起坐辅助支撑装置为可折叠式,大腿固定板、支撑杆、滑条杆所组成的机构在人体坐下时可展开成三角形提高装置的稳定性。滑条杆在滑槽内滑动,可实现装置的收回与展开,人体处在坐下状态时弹簧处在压缩状态且用卡扣,卡死长度一定,此时装置锁死,滑条杆无法滑动,而行走时弹簧处在原长状态可在一定范围内自由拉伸压缩,阻力较小,此时的滑条杆可以小幅 度上下滑动。当使用者需要坐下时只需稍用力弯曲大腿使弹簧压缩到卡扣处即可使装置展开,当使用者需要站起时只需解开弹簧的锁定,弹簧即可慢慢恢复原长,同时利用弹簧的压力帮助使用者站起来。整套装置可实现随时起坐。整体采用铝合金材质,减轻了质量,提高了结构强度。这种结构的辅助装置的优点是可以随时拆卸,稳定性较好,使用者站起时有一个力帮助站起,对老年人和行动不便者更为有利。但是也存在着一些问题,由于装置完全由弹簧来控制,可靠性并没有手动控制的好。同时装置在行走时也有轻微的摆动,不能完全折叠不动,对行走会产生一定的干扰。图3为方案1的辅助坐立支撑模块具体示意图。
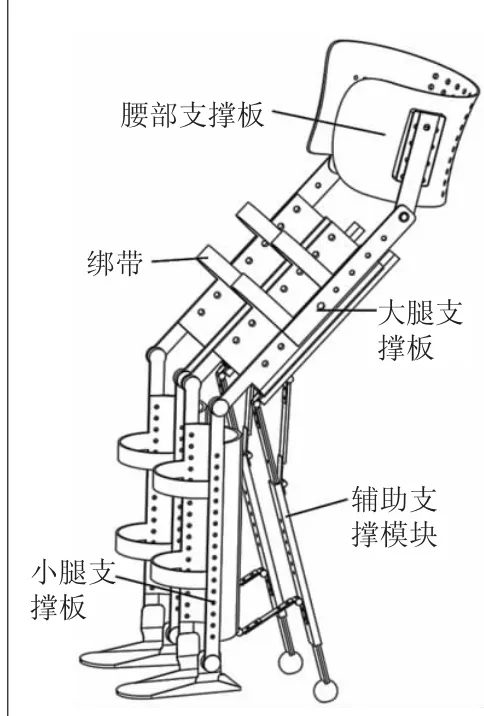
图2 装置整体结构示意图(方案1)

图3 辅助坐立装置局部图(方案1)
第二种方案如图4(未安装控制和动力装置)所示,在大腿处的支撑板上固定一滑槽和连杆,在滑槽上安装有一手柄,可手动控制装置的展开与收缩,这样提高了装置的可靠性,通过三根杆并列分布的形状,在展开时可构成多组三角形,使装置结构的稳定性大大提升,同样也采用铝合金材质,减轻了质量。与第一种方案不同之处在于,该方案没有弹簧,装置在收起后无联动,与行走支撑装置无关联,所以不会对使用者的行走姿态产生影响。但是这种设计方式也存在一些缺点,因为它没有弹簧,完全靠手动收回装置,不能在使用者站起来时提供一个反向的支撑力,所以对老年人站起时并无多大助力作用。而且该装置在手柄处卡槽的卡条受力较大,容易断裂,需要采用更高强度的材料制作,提高了制作成本。图5为方案2的辅助坐立支撑模块具体示意图。
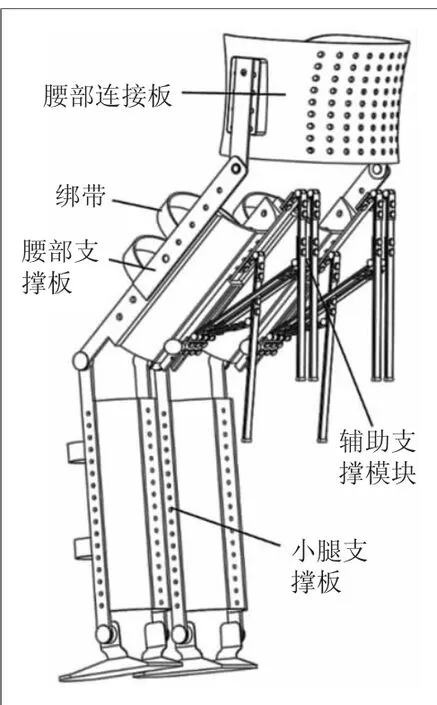
图4 装置整体结构示意图(方案2)
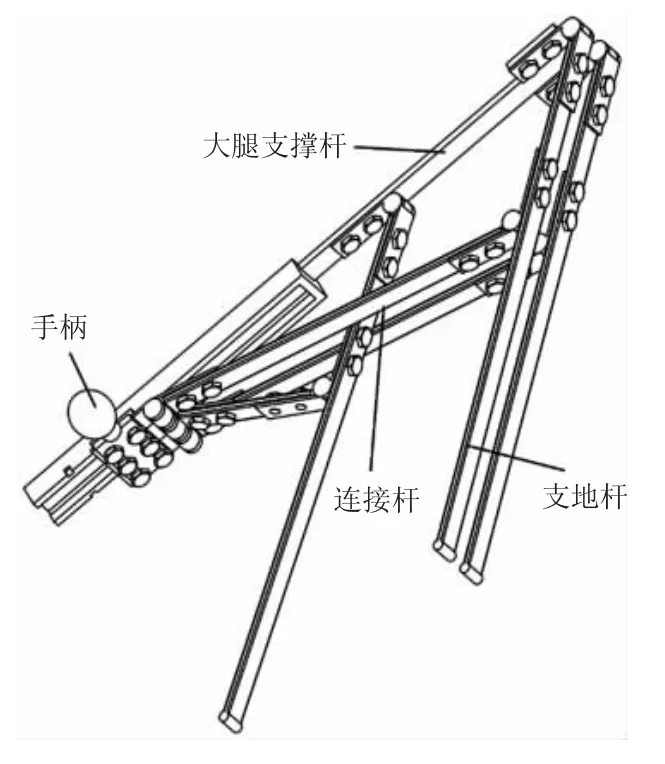
图5 辅助坐立装置局部图(方案2)
1.2 方案比较
综合比较这两种方案,均存在各自的优势,在外骨骼辅助坐立方面均为一种创新,但也同样存在一些无法避免的小瑕疵,它们的区别如下:1)前者采用弹簧作为控制收缩和展开的方式,而后者采用手柄手动控制的形式,提高了稳定性;2)前者的坐立辅助支撑装置对行走姿态有一定的影响,但后者则完全独立避免了这种问题;3)前者可为使用者站起时提高一个抬起的支撑力,但后者因缺少弹簧而不存在这个力;4)前者展开后整体装置稳定受力均匀,但后者因某些部位受力偏大而影响装置的整体寿命。这些不同之处给我们将来创造更好的方案提供了参照,也为将来外骨骼装置的研究提供了帮助。
2 装置受力分析
根据结构特点,不同的装置所承受的载荷也不一样,外骨骼装置的设计要求是必须要在有限的装置质量内获取足够的承载能力,为此下文将对两种结构装置进行详细的力学分析,以检验装置的可靠性、安全性是否达到要求。
2.1 装置1杆件的受力分析
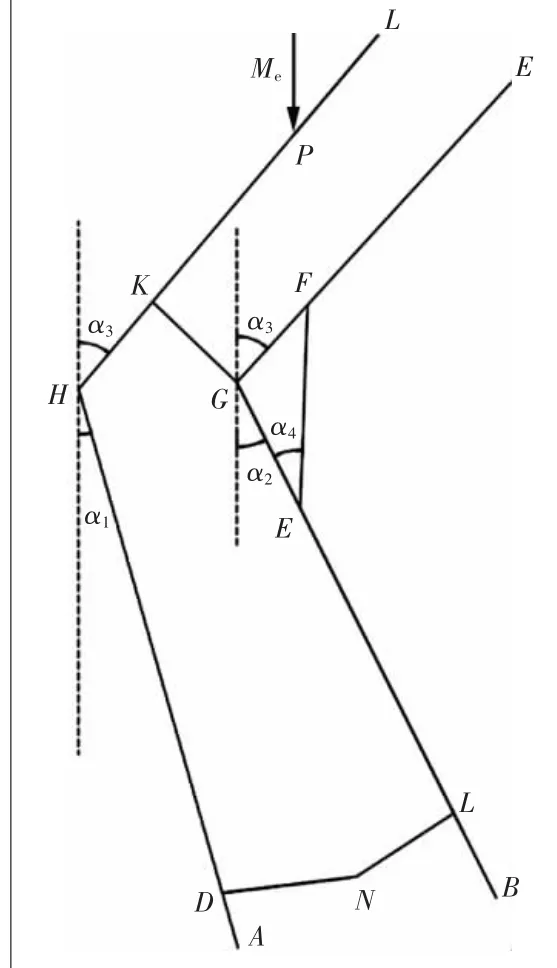
图6 装置1结构受力简图
对于第一种装置的坐立机构可将其简化(如图6)。根据人体下半身的大致长度比例,可以确定各段杆的长度分别为:LHK=50 mm;LHP=300 mm;LHL=400 mm;LKG=100 mm;LGF=90 mm;LGM=350 mm;LHD=450 mm;LHA=500 mm;LBC=150 mm;LCE=250 mm;LFE=180 mm;LGE=121.2 mm。
根据结构特点,对机构中的每根杆进行分析后发现在该机构中杆EF 所受外力最大,最容易失效。根据计算得杆EF所受力为

在该式中角α3在0°~45°之间变化,当α3=45°时,即人体坐下时,将α1=15°、α2=30°、α3=45°、α4=30°代入式中可得FF′max=1466.26 N。假设杆EF横截面为一5 mm×5 mm的正方形面,则其所受压应力最大值为58.7 MPa,远小于铝合金的拉抗强度,故该设计满足强度要求。
2.2 装置2杆件的受力分析
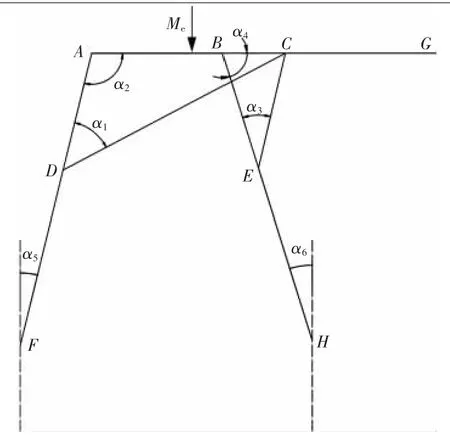
图7 装置2结构受力简图
对于第二种装置的坐立机构可将其简化(如图7)。该结构的受力比第一种要更均匀更可靠,根据人体大腿部分和小腿长度的大致长度比例,可以确定各段杆的长度分别为:LAB=130 mm;LBC=70 mm;LAG=400 mm;LAK=100 mm;LAD=120 mm;LAF=300 mm;LCD=250 mm;LBE=120 mm;LCE=120 mm;LBH=300 mm。
根据机构受力特点和对各杆受力分析,可以确定该装置中DF 杆和BH 杆为危险杆。通过对各杆受力分析和计算后可求得B点和F点所受力的大小分别为:
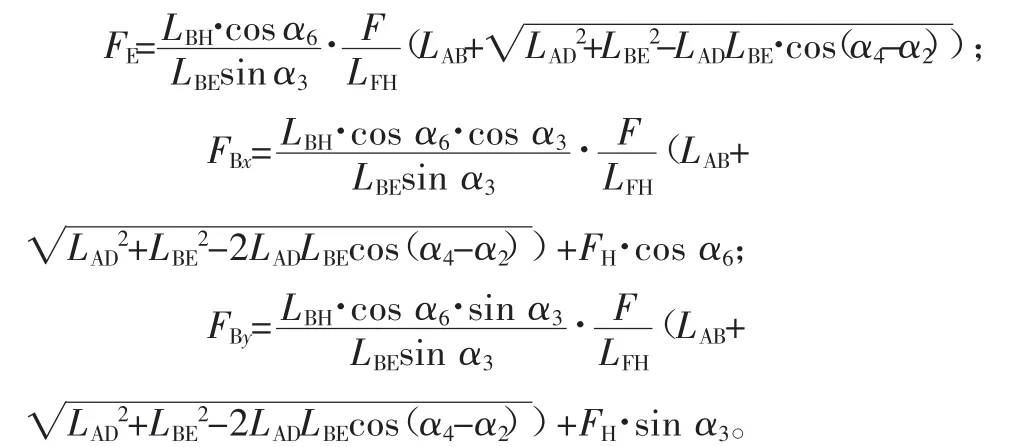
假设装置完全展开后α1=0.289π,α2=0.5540π,α3=0.1884π,α4=0.4058π,人体重力Me=2000 N,将其代入可得FE=584.62 N,FBx=271.94 N,FBy=86.29 N。相比较第一种装置,该结构更加合理可靠,可满足设计要求。
3 控制系统模块的开发与研究
3.1 硬件选择与设计
控制系统模块主要由Arduino开发板,旋转舵机模块,蓝牙传输模块,传感器模块等部分构成。其主要的工作原理如图8所示。其中Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件(各种型号的Arduino板)和软件(Arduino IDE)。由一个欧洲开发团队于2005年冬季开发。它构建于开放原始码simple I/O介面版,并且具有使用类似Java、C语言的Processing/Wiring开发环境。主要包含两个部分:硬件部分是可以用来做电路连接的Arduino电路板;软件部分则是Arduino IDE,提供计算机中的程序开发环境。只要在IDE中编写程序代码,将程序上传到Arduino电路板后,程序便会命令Arduino电路板要做些什么了。Arduino 平台是一个单片机系统,包含有很多硬件和编程软件(IDE 即编程环境)。同时,还有各种各样周边的硬件兼容Arduino 平台,并且这些硬件通常都已经带有兼容Arduino 控制器的函数库[4]。由此可见Arduino开发板(如图9)内部结构简单,功能强大,价格合适,易于操控,有着诸多优势。
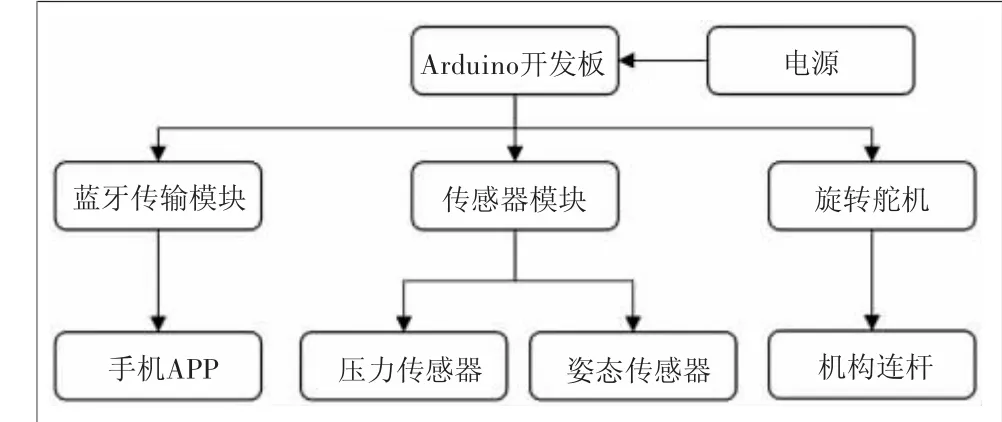
图8 软件运行过程框图
舵机驱动模块选用PCA9685模块连接Arduino开发板用以控制旋转舵机按照预定程序转动。旋转舵机选择LD-260MG型数字舵机(如图10),其工作电压为6.0~8.4 V,控制精度为3 μs,转矩为60 kg·cm。它的特点在于超大转矩,虚位小,精度高,采用双轴固定更稳定。同时该型舵机价格合适,适用于大批量使用。

图9 Arduino开发板

图10 舵机示意图
传感器模块选用JY901姿态角度传感器(如图11),该传感器安装于人体腿部两侧,与人体脚底的压力传感器协同使用,用来判断使用者的姿态情况。根据反馈信息来实时确定旋转舵机的转速和转角。整体采用闭环控制系统,提高了控制系统的灵敏度与智能化程度。
蓝牙传输模块选用HC-06蓝牙(如图12)芯片,其使用距离可达30~40 m,兼容性良好,经测试可以Arduino完美连接,蓝牙通信负责进行上下位机系统之间的数据传输[5],它将开发板与APP联结起来,将控制信号从手机传到Arduino芯片,或者将传感器的反馈信息传回APP。其具体实现过程如图13所示。

图11 传感器模块示意图
图12 蓝牙模块示意图

图13 控制模块工作框图
3.2 软件设计
在使用者穿戴本装置行走时,JY901姿态角度传感器实时获取人体的姿态信息,并与设定值比较以确定舵机的转动模式,初始时左舵机带动左腿转动,当左脚着地后,左脚压力大于设定值且姿态传感器检测到欧拉角为正值时,左舵机复位,同时右舵机反向转动,以实现身体前倾。当右脚离开地面后,右脚压力小于设定值且欧拉角为负值时,右舵机复位,至此完成左腿的迈步动作,右腿的迈步动作同理。这些步骤的具体过程均由在Arduino开发板内已经编写好的程序实现。
同时通过手机内下载APP的方式可以将实时运动控制信息反馈到用户端,未来可以开发小程序,精简程序内容,让其终端服务更加合理完善。
4 结 语
本文设计的人体起坐支撑的外骨骼装置,实现了助力行走、站立支撑、辅助起坐等多种功能,助力装置采用简单芯片控制,成本可控,方式多样。所展示的两种外骨骼辅助起坐结构均有较好的应用潜力,在实际生产中可以实现。整体装置具有便携、轻巧、节能、高效、低成本等诸多优势。通过巧妙的连杆结构帮助坐立,通过传感器使装置的可靠性大大提升。这套装置大大减轻了使用者的行走负担,同时提高了人们的生活质量,符合目前市场需求,应用前景十分广阔。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
小哥白尼(野生动物)(2021年12期)2021-03-29
自动化学报(2019年6期)2019-07-23
西南交通大学学报(2018年6期)2018-12-18
好日子(2018年5期)2018-05-30
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
中国新闻周刊(2016年33期)2016-10-27
大众健康(2016年3期)2016-05-31
舰船科学技术(2015年8期)2015-02-27
