
基于双频识别声呐的鱼类目标识别与计数
2020-12-24 13:43朱振宏曹正良彭战飞
渔业现代化 2020年6期
沈 蔚,朱振宏,张 进,曹正良,彭战飞
(1 上海海洋大学海洋科学学院,上海河口海洋测绘工程技术研究中心,上海 201306;2 上海海洋大学海洋牧场工程技术研究中心,上海 201306)
水声探测方法是当前进行水生生物研究的高效、快捷、可靠的方法,凭借其调查精度高、调查范围广、对环境无影响、对调查目标无损害等优点,已大量应用到鱼类资源的调查研究当中[1-3]。在进行鱼类资源评估过程中,使用各类回声探测仪获取数据,并利用回声积分、回波计数等方法对采集到的水声数据进行处理与统计。近年来,已有大量研究人员在海洋、湖泊、河流、水库等水域将水声探测方法运用到鱼类资源研究当中[4-8]。当前常用的水声探测主要是对鱼类目标资源密度、空间分布等进行研究,对于鱼类目标运动轨迹追踪、个体鱼体信息提取等研究较少[9]。
双频识别声呐(Dual-frequency Identification Sonar,DIDSON)能够在浑浊、黑暗的水下环境显示高清晰度的声学图像,广泛应用于水下管道检测、水下搜寻、水下安防等多个方面[10]。在渔业资源管理方面,DIDSON主要用于河流、湖泊、水库等内陆水域的鱼类洄游计数、行为观测等。Han等[11-12]利用DIDSON尝试对洄游鱼类和养殖大型鱼类进行计数和体长提取;Handegard等[13]利用低通滤波算法对DIDSON采集声学数据中不同密度下的单个鱼体目标进行识别;童剑锋等[14-15]对DIDSON形成的声学图像进行初步研究,并用于溯河洄游幼香鱼的计数;张进等[16]利用DIDSON对上海临港滴水湖中鱼类资源进行定量评估和空间分析;荆丹翔等[17]进行了基于识别声呐的鱼群目标检测跟踪及鱼群在水下三维空间运行轨迹和分布研究。
Echoview是澳大利亚Echoview软件公司开发的一款功能强大、应用灵活的水声学数据处理软件,经过多年发展,已被全球渔业和环境科学研究者作为研究渔业资源和海洋、淡水生态环境的重要手段之一。
本研究在相关研究基础上,利用Echoview软件结合人工判断对DIDSON图像数据进行鱼类识别提取,其处理流程主要包括背景噪声去除、鱼类目标识别、目标属性提取、目标运动轨迹追踪,最终提取出所探测到的鱼类目标及其个体体长信息,为后续更深入的鱼体行为研究和鱼类资源评估提供技术参考。
1 材料和方法
1.1 声学仪器简介
DIDSON由美国华盛顿大学应用物理实验室研发,Sound Metrics公司制造,其成像原理是基于声学透镜组合对声波进行压缩聚焦,进而形成高清的声学图像数据。声学透镜在进行压缩波束时消耗功耗少,易于发射和接收同一波束,提高了工作效率,也缩减了仪器的体积[15-16]。本研究所使用的标准型DIDSON有两种工作模式,即探测模式和识别模式,分别对应仪器不同工作频率,具体技术参数见表1。DIDSON在工作时可针对探测范围内的观测目标进行自动调焦,根据设置的最大观测范围自动调节其工作频率,以保证观测范围内目标图像的清晰度。
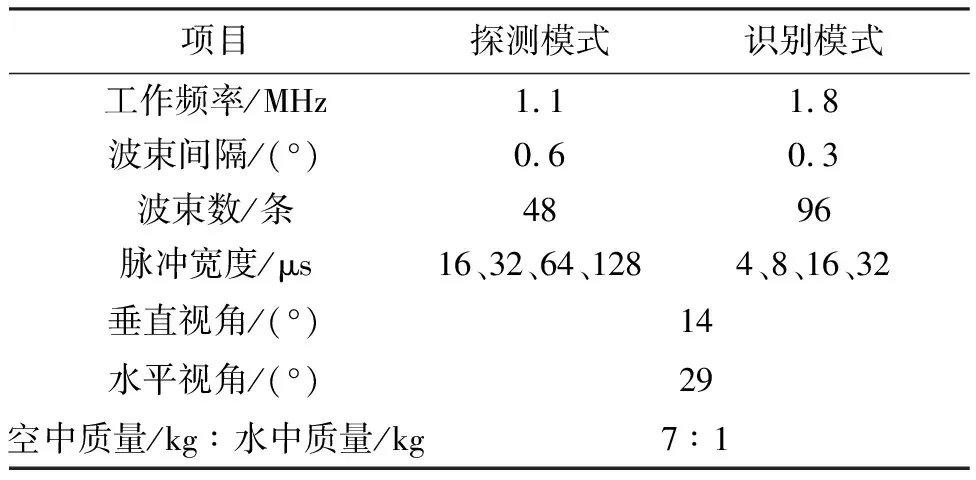
表1 DIDSON详细技术参数
1.2 数据采集
试验数据来自2019年5月份上海市某小型水库鱼类资源声学调查项目,由小型调查船搭载DIDSON、GPS进行走航式采集,为避免噪声对采集数据的干扰,将DIDSON声呐探头固定于船舷左前方远离发动机部位,DIDSON换能器及安装如图1所示。采集数据使用DIDSON配套采集软件DIDSON V5.24,同步记录于采集笔记本电脑中,探测船速为4~5节,水面无较大风浪。
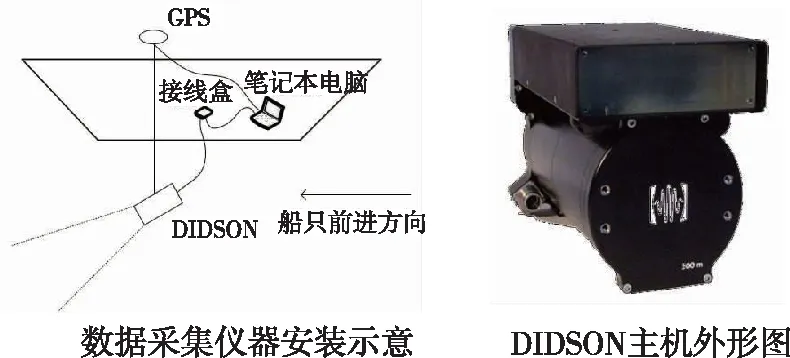
图1 主机及安装示意图
2 鱼类目标识别与提取方法
2.1 背景噪声去除
在数据采集过程中,由于船只运行、移动产生噪声及水中植被、悬浮物等对DIDSON数据产生干扰,使得在原始声学数据中识别目标变得非常困难,故在声呐数据的预处理阶段,首要工作是将背景噪声去除[18]。
首先使用Kovesi图像去噪法将声呐图像中出现的随机分布的斑点噪声进行模糊化去除,斑点噪声多由水中气泡、浮游生物、树枝等产生[19],通过设定图像最小波长、反向标准差等,在声呐图像去除噪声的前提下保留图像细节。其去噪效果如图2b所示,其中,红色标记为类鱼体目标,与原始图像图2a对比发现,将声呐图像中小型斑点噪声去除、水底植被等噪声模糊化处理后,去噪效果较为明显。
噪声去除后,使用背景差分法将声呐图像中水体背景进行去除[20]。该算法假设水体静止不动,首先从当前数据脉冲信号及其邻近信号中进行统计分析,捕获数据中存在的静态背景元素;然后以该静态背景元素中最低信噪比值作为阈值,从数据文件中减去该值。即可将数据中静态背景进行去除,如式(1)所示:
|Ft(x,y)-Fb(x,y)|=Dt(x,y)
(1)
式中:Ft(x,y)表示图像位置(x,y)的像素值;Fb(x,y) 表示图像位置(x,y)的水体背景像素值;Dt(x,y)表示(x,y)位置的去除背景结果。图2c为去除图像背景效果图,其水体背景、水底和产生的声学阴影等都被去除。其中,红色圆圈标注为类鱼体目标,下方有多个悬浮斑点,推测判定为Kovesi算法遗留斑点噪声或者水体小型浮游生物。
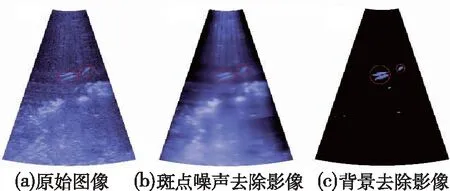
图2 背景噪声去除效果图
2.2 鱼类目标识别
对于DIDSON影像中鱼类目标识别,基本原理是设定鱼类目标回声阈值区间i,并基于原始的回声图像创建一个新的多波束目标样本值Gk,随后判断回声图像中每个像素值Hk(x,y)是否在阈值区间i当中,若在区间当中,即用创建的多波束目标样本值Gk来代替或标注符合要求的像素值Hk(x,y),从而实现声呐图像目标的识别。并在目标识别的基础上,根据其回声影像中像素值数据,得到其长度、面积、厚度等目标属性,同时,可设定阈值来限定得出需要的目标属性值[21]。
图3a为DIDSON原始声学影像数据,显示为2个类鱼类目标并有条带状声学阴影出现;图3b为在背景噪声去除算法基础上进行图像目标识别,并使用蓝色圆点标记得出类鱼类目标;图3c为在目标识别基础上进行目标属性阈值的限定,限定目标长度为5~120 cm范围以内。可看出体长较大个体被排除,仅显示个体较小的鱼类目标,与实际观测结果相符。
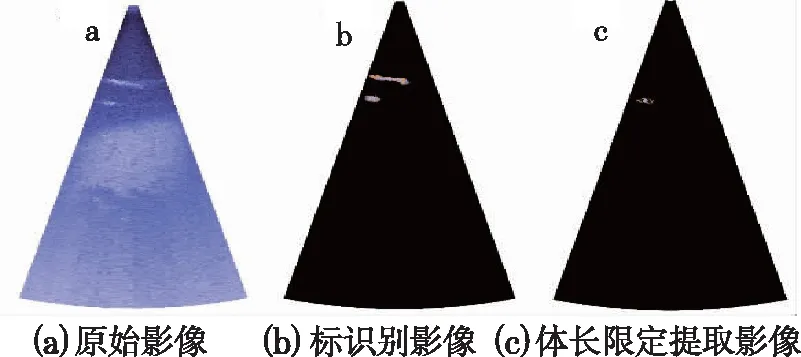
图3 DIDSON影像目标识别与属性限定
2.3 目标运动轨迹追踪
DIDSON声呐图像数据中实现鱼类目标个体计数,关键是避免同一目标因出现在连续多帧图像中而产生重复计数。需对鱼类目标运动轨迹进行追踪,即将在同一轨迹上的目标判定为同一条鱼[22]。
在进行目标轨迹追踪处理前,先将DIDSON每帧的影像数据拼接成连续的回声图像,在该回声图像中可观测得出每条鱼的运行轨迹、相对于波束主轴的运动角度等,后续的鱼类目标的编辑、分析处理等都是基于该图像进行。在Echoview软件中可通过设定其过滤目标系数来改善影像拼接的效果。图4为截取完成拼接后的回声图像。根据已有经验,人工判读图中红色标记标注部分多为鱼类运行轨迹,在回声图中表现为多个连续的点状个体排列连接形成线状目标,标注之外的零散分布的点状目标,多为预处理遗留噪声、水中浮游生物或者DIDSON分辨率无法正确识别的较小鱼类目标。

图4 DIDSON影像拼接图
DIDSON声呐图像数据拼接完成后,使用α-β轨迹追踪算法对回声图像中鱼体运动轨迹进行识别跟踪,跟踪结果以不同颜色的线条显示,算法采用固定系数滤波的方法,选择单个目标作为附加到轨迹中的候选对象,追踪算法中对于位置和速度的变化分别由α和β两个参数控制。其原理为:通过前一时刻的状态量估计当前时刻的状态量,然后与当前时刻的观测量相对比。其算法方程如下所示[23]:
(2)
(3)
其中,位置和速度的预测值为:
(4)
(5)

3 计数与资源量评估
3.1 鱼类目标计数
本次调查共采集14个文件,对应14个航段,数据处理过程中对每航段数据进行鱼类目标计数和体长提取。首先基于目标运动轨迹追踪实现鱼类目标计数,将每条轨迹识别为一条鱼,并同步记录每条轨迹中心点处的经纬度坐标和所处深度。为了验证目标计数的准确性,根据数据采集质量,选取4条航段声呐数据,采用人工目视计数的方法进行验证。人工目视计数是指将DIDSON影像数据进行慢速回放,通过人工判读对影像中出现的鱼类目标进行计数,统计对比结果见表2。
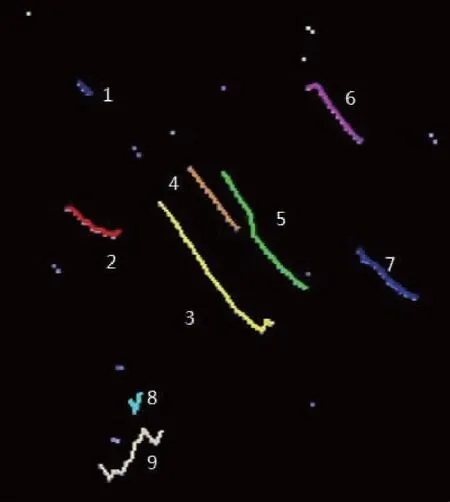
图5 个体目标轨迹追踪

表2 人工计数与软件计数对比
从表2可以得出,人工目视计数与软件自动计数结果偏差在10%以内,平均计数误差为7.2%。该方法中个数统计存在偏差的原因有多个方面:一是出现较密集鱼群时,追踪得出的鱼类运动轨迹会出现错乱,导致追踪结果出现重复计数等偏差;二是当鱼类目标在靠近水底或在水草中游动时,会被错判为水底或水中噪声,从而排除在外;三是水中部分悬浮物其目标反射强度与鱼体相近,被误判为鱼类等。
3.2 鱼类体长提取
针对单个鱼类目标,首先根据像素将同一运动轨迹上的每一帧图像中鱼体体长进行提取,然后对该目标运动轨迹上的所有体长数据进行统计判断,由于鱼运动姿态和方向各不相同,但鱼类目标在水平方向运动时体长数据最大也最接近实际值,因此取测得的最大体长为该目标的体长。
由于成像声呐自身分辨率问题以及走航式采集产生气泡较多,因此体长较小鱼类易与水中浮游生物、树枝等噪声混淆,在体长信息提取时对于平均体长小于5 cm的鱼类目标忽略不计。图6为提取出的鱼体体长信息分布图,鱼体体长绝大部分集中于10~20 cm范围内,占总数的40%以上;体长范围在5~10 cm和20~50 cm的鱼类目标也占比较多,接近总量的40%,60 cm以上鱼类数量较少,占总量的5%左右。
3.3 鱼类资源总量估算
根据目标计数统计结果,14条航段数据共统计得出鱼类目标1 938尾。采用平面密度法对水库内的鱼类资源总量进行估算,首先根据每条航线探测到的鱼类数量和仪器探测面积得出航线内鱼类密度;其次将所有航线的平均鱼类密度视为水库鱼类密度,根据水库水域面积估算得出水库鱼类总数量。其计算公式如下:
(6)
(7)
(8)
N=ρ·S
(9)
式中:ni、si和ρi表示第i条测线的鱼类数量(尾)、仪器探测面积(m2)和鱼类密度(尾/m2);li和ri表示第i条测线的探测长度(m)和提取出的平均水深(m),公式(7)是通过仪器安装角度和仪器探测范围视角简化得来;ρ视为水库内的鱼类平均密度(尾/m2);n表示航线数量,此处为14;S、N分别表示水库总面积(m2)和鱼类资源总量(尾)。
本次调查探测航线总长度为17.19 km,平均水深4.26 m,经计算可得,航线内鱼类目标平均密度约为0.052 9尾/m2。本次调查水库水域面积为1.92 km2,因此,水域内鱼类资源总数量N=101 568尾。
4 讨论
4.1 DIDSON适用场景
DIDSON作为一款高清晰度的声学摄像仪,其声学影像数据能清晰、直观地显示出鱼类形态、位置信息,与常规的科学鱼探仪相比,具有更多的信息量、更直观的图形显示等。沈蔚等[24]曾对DIDSON和科学鱼探仪Biosonics DT-X进行比较分析,结果显示两类仪器评估出的鱼类资源并没有太大差距,但在浅水地带DIDSON所受到的水中气泡等因素的干扰更小,能较为方便地提取出鱼类的体长信息,并进行鱼类行为的观测。
DIDSON具有较高的工作频率,对于船速要求较高。张进[16]在研究中指出,一旦船速较快,采集到的鱼体目标就会出现锯齿状轮廓,当速度降低时锯齿状特征就有明显改善。在针对DIDSON声呐图像的诸多研究中[13,21],多采用定点观测进行数据采集,所采集到的数据质量较好,对于数据中噪声的处理也较为简单。因此,DIDSON更适用于在江河湖泊等浅水水域开展定点观测,或搭载于无人船、小型测量船等进行慢速走航探测,对于风浪大、深度大的海洋鱼类资源探测显得力所不及。
4.2 声呐图像处理方法
针对DIDSON声呐图像噪声去除,童剑锋[15]采用3×3模板的中值滤波和高斯滤波结合进行图像去噪和平滑处理;Kang[21]使用背景差分的方法,将一段没有鱼类目标的声呐图像作为子集,然后逐帧减去该背景进行噪声去除,但面对走航采集的声呐数据,图像背景复杂,使用上述方法效果不佳。本研究采用Kovesi图像去噪和背景差分相结合,去噪效果较为理想,但是将斑点噪声模糊化的处理手段,也会使得一部分鱼体信息模糊,尤其当鱼体目标较小时,会被识别成斑点噪声,降低了目标识别准确度,后续应将背景去除与运动轨迹相结合来改进算法,按照运动状态来区分鱼类目标和噪声。
进行鱼类目标运动轨迹追踪是避免重复计数的必要手段,常见的目标追踪方法有卡尔曼滤波、粒子滤波及其各种扩展算法等,本研究中采用的α-β轨迹追踪对于离散目标识别准确度较高,但当目标成群出现时,多个运行轨迹相互交叉,会出现重复计数或少计数的问题。
4.3 资源量评估的影响因素
声学数据采集时,由于试验水库水位较浅,船只在移动过程中产生的水流和噪声都会对鱼群产生驱赶,因此需要引入合理的驱赶系数。比如张信[25]通过同一水域的定点观测和走航观测得出的鱼类密度比值来确定,也可以使用无人船搭载DIDSON进行探测,减少船只走航对鱼的驱赶。同时,回声探测仪普遍存在一定的探测盲区,使水面表层的鱼类目标无法被探测到[26]。本研究使用船只较小,仪器吃水浅且倾斜安置,减小了仪器的探测盲区。在数据分析阶段,李斌等[27-28]指出,为避免水底强反射信号干扰,在数据分析时需要将靠近水底部分信号进行删除[27-28]。本研究中,DIDSON以与水平方向呈60°夹角的方式安装,避免了水底强反射信号的干扰,减少对水底部分的剔除,也提高了探测到水底鱼类目标的可能性。
5 结论
基于Echoview声学数据后处理软件及其相关算法,实现了从DIDSON声呐数据中进行鱼类目标识别、自动计数和体长信息提取,并通过与人工计数相对比的试验得出该方法具有较高的统计精度。依据提取出的鱼类目标数据并结合相关资源评估方法,可对水库中的鱼类资源进行评估。结果证明,DIDSON可以用于鱼类识别与计数,尤其在浅水水域的鱼类资源探测与管理方面具有非常广阔的应用空间。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
天天爱科学(2022年9期)2022-09-15
舰船科学技术(2022年11期)2022-07-15
昆明医科大学学报(2022年1期)2022-02-28
煤气与热力(2021年5期)2021-07-22
数字海洋与水下攻防(2020年5期)2021-01-04
家庭影院技术(2020年11期)2020-12-28
家庭影院技术(2020年5期)2020-08-24
家庭影院技术(2020年6期)2020-07-27
海军航空大学学报(2019年1期)2019-04-29
