
新能源汽车防追尾预警刹车系统的设计与实现
2020-12-25 03:16李帆
微型电脑应用 2020年12期
李帆
(陕西交通职业技术学院 教务处, 陕西 西安 710018)
0 引言
随着汽车使用量的持续增加,在为日常生产生活带来巨大便利的同时导致道路行车安全系数不高的问题日益突出,道路交通事故频发,带来一定的经济损失,既对人们的生命财产安全带来不同程度的损害又对社会秩序产生了不良影响。汽车追尾是引发交通事故的主要原因之一,通过防追尾预警系统及时检测到可能发生的追尾事故,并在较短的安全时间内向驾驶员发出报警提示并提醒其进行正确合理的操作(包括制动、刹车等)。随着节能环保的深入开展,新能源汽车的市场占有率不断扩大,为此本文在现有研究成果的基础上设计了一种针对新能源汽车的防追尾预警系统[1]。
1 现状分析
相关统计资料显示在引发交通事故的多种原因中汽车追尾占比较高,尤其是行驶于高速公路中的汽车发生追尾事故的概率较高,目前汽车防追尾预警功能已成为一种实用有效的手段,这就促使种高效可靠的汽车防追尾预警系统成为现阶段领域内的一项研究热点,众多汽车生产企业、高校、社会科研机构投入到了这方面研究中。在现有的汽车防追尾预警刹车系统中,自车和前车(包括为静止障碍物的前车或物体)的距离及相对速度的探测与测量功能通过车载雷达传感器的使用实现,系统在自车同前方的车辆或静止物体间的距离(测量数值显示于液晶显示屏上)小于规定的安全数值的情况下会及时发出报警信号(包括声音和灯光两种形式),提醒驾驶员制动或控制车辆自动刹车。目前国内外关于汽车防追尾预警系统方面的研究已经取得了一定的进展,例如,一种依赖于车与车间的信息交互的主动防追尾预警系统,该系统的功能主要基于雷达与摄像头实现,但在工作过程中涉及到大量的信息处理,系统的报警准确率与实时性有待提高;根据对后向可达性与不变集理论的分析结果完成的汽车间最大允许安全距离的设置(包括位置误差、加速度),主要通过多个控制器(两个或两个以上)的使用实现对汽车相对速度、车间距离的测量,但因对汽车自适应巡航系统的要求较高而限制了应用范围;一种结合运用确定性及随机参数的主动防追尾碰撞预警算法(同时考虑到了驾驶员反应时间),该算法基于人工神经网络,使自车与前车追尾碰撞的风险得到有效降低,但要求所探测的数据具备较高的精度。为进一步提升系统的工作效率及报警准确率,本文主要对汽车主动防追尾预警刹车系统进行了优化设计,通过使用控制器单一的AT89S52实现了系统分模块的设计(主要包括车速检测、声光预警、测距信息输入等模块),通过传感器完成车速、车距等信息的采集,并在此基础上完成车间安全距离的准确计算,及时向驾驶员发出声光报警,从而使汽车追尾碰撞事故得以有效避免。
2 防撞原理
通过安装在汽车上的防碰撞系统实现在出现追尾隐患时,向驾驶员发出警报提示,并在较为紧急的情况下进行自动控制和紧急制动,由于在安全距离内出现的追尾隐患对汽车防追尾报警系统的灵敏度要求较高,为给驾驶员留出较为充足的反映时间、提高系统的可靠性,需最大程度降低防追尾系统的误警率和漏警率,汽车防追尾系统的可靠性主要受到行驶车辆的运动状态、路面附着系数、驾驶员的应急能力及反应时间等因素的影响。经进一步优化的汽车防追尾预警刹车系统主要负责检测自车与前方行驶汽车间的距离,在检测距离小于安全距离的情况下通过预先设置输入的报警程序通过蜂鸣器向驾驶员发出报警提示,提醒驾驶员采取刹车操作,紧急情况下可进行自动刹车。
2.1 碰撞分析模型
对于行驶在高速公路同一车道上两个任意时刻的前后两辆汽车(后车A和前车B,行驶方向相同)的相对位置,如图1所示。
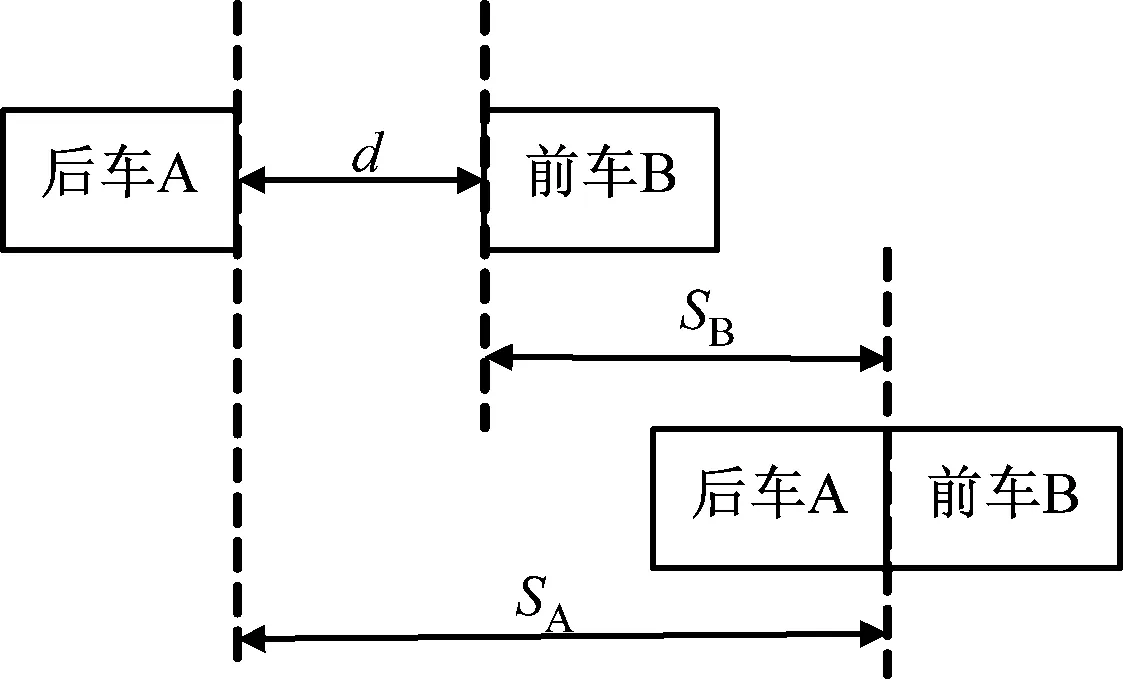
图1 前后车相对位置示意图
使用激光测距传感器探测距离,某一时刻A和B的间隔距离由d表示,A采取制动后由SA表示其行驶的距离,B行驶的距离由SB表示,最小纵向安全距离由dmin表示(即SA-SB),假设,某一时刻测得的A和B间距为D,并且A、B两车停止时需保持由d0表示的额定安全距离(通常在2~5 m之间),汽车相对速度及驾驶员反应时间是影响d0大小的主要因素,危险报警距离由Sw表示,本文在此基础上确定了Sw=d0+dmin≥D的报警规则,防尾预警刹车系统在动态车间相对距离差(即D-dmin)不超过d0的情况下开始向驾驶员发出语音报警,提醒其采取避免追尾碰撞的相应措施[2]。
2.2 汽车制动距离
驾驶员接受紧急制动信号后,汽车制动状态下的制动减速度、踏板力、制动时间的关系曲线,如图2所示。
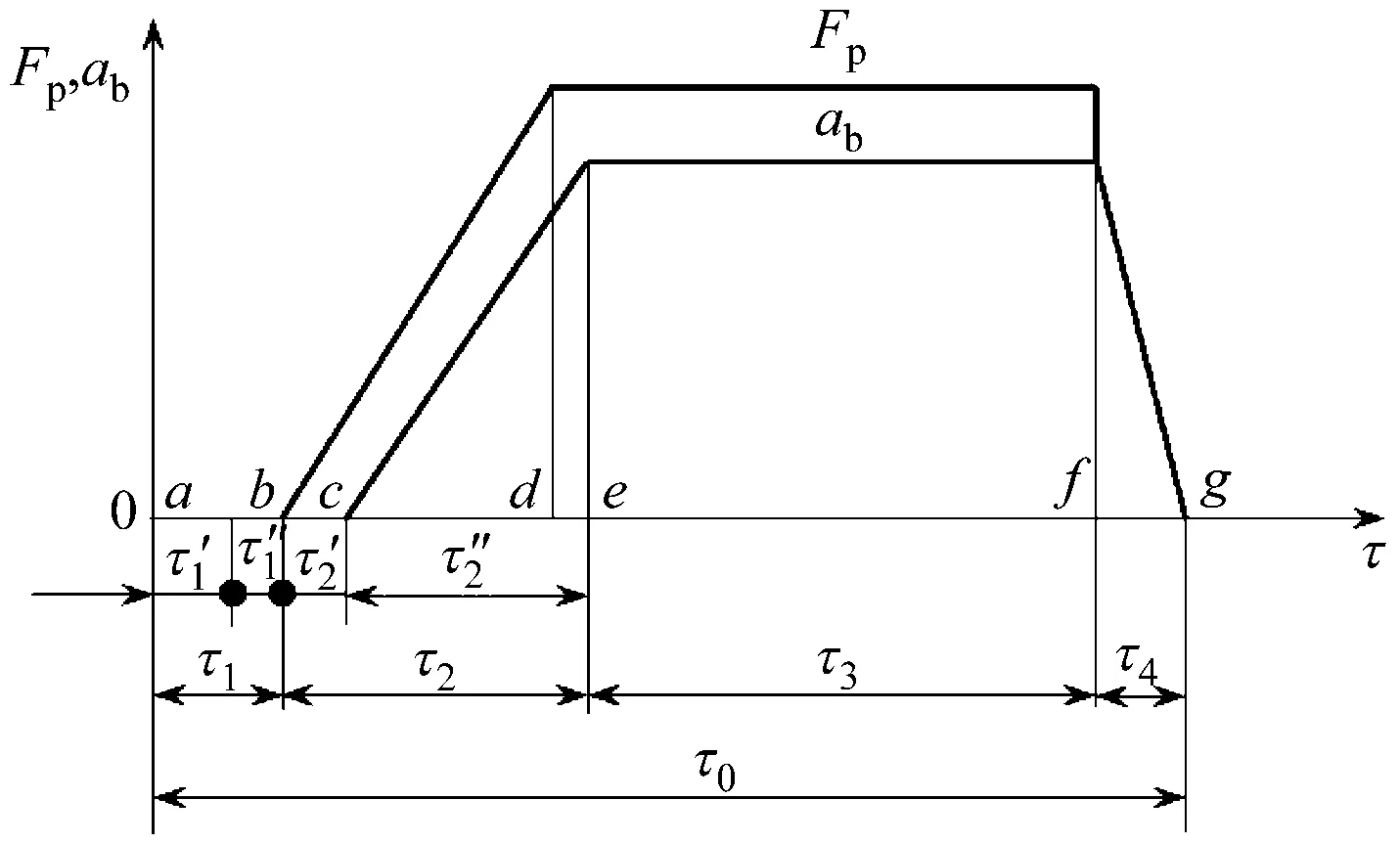
图2 汽车的制动过程

(1)
2.3 危险报警距离的建立
在前后两车均处于行驶状态下,后车A的驾驶员难以预知前车B接下来的行为,尾随车的危险报警距离根据车辆不同行驶状态可分为三种情况[4]。
(1) 前车静止或前方存在静止障碍物时,此时推得SB=0,车间距离表达式,如式(2)。
(2)
假设,后车最大制动减速度由aAmax表示,前车的速度和制动减速度分别由vB和aB表示,后车停止时两车间的额定安全间距由d0表示,此时的危险报警距离表达式,如式(3)。
(3)
(2) 前车减速行驶时,后车车速和前车车速分别由vA和vB表示,如式(4)、式(5)。
(4)
(5)
式中,vr表示相对速度,Δt表示单位时间间隔,D2和D1表示Δt内的实时测量值(由激光测距传感器完成),vB=vA-vr,vr=(D2-D1)/Δt。报警模型通常会受到aA、aB大小的较大影响,前后两车都采用最大减速度计算以简化计算,取aAmax=aB时的危险报警距离表达式,如式(6)。
(vA+vB)vr/25.92aAmax+do
(6)
(3) 前车匀速或加速行驶时,尾随车车速小于前车车速时不会发生追尾碰撞的情况,在尾随车车速大于前车车速时发生碰撞的可能性较大,危险报警距离表达式,如式(7)。
(7)
3 汽车防追尾预警刹车系统的设计与实现
3.1 系统总体架构
本文所构建的系统主要由信息采集(主要由包含三个按钮的路面情况选择开关、安装于车前保险杆处的激光测距传感器、安装于变速箱蜗轮轴上的霍尔车速传感器、驾驶员反应时间构成)、中央信息处理(系统的运算核心)、负责系统输出执行部分的声光预警3大模块构成,其总体架构示意图,如图3所示。
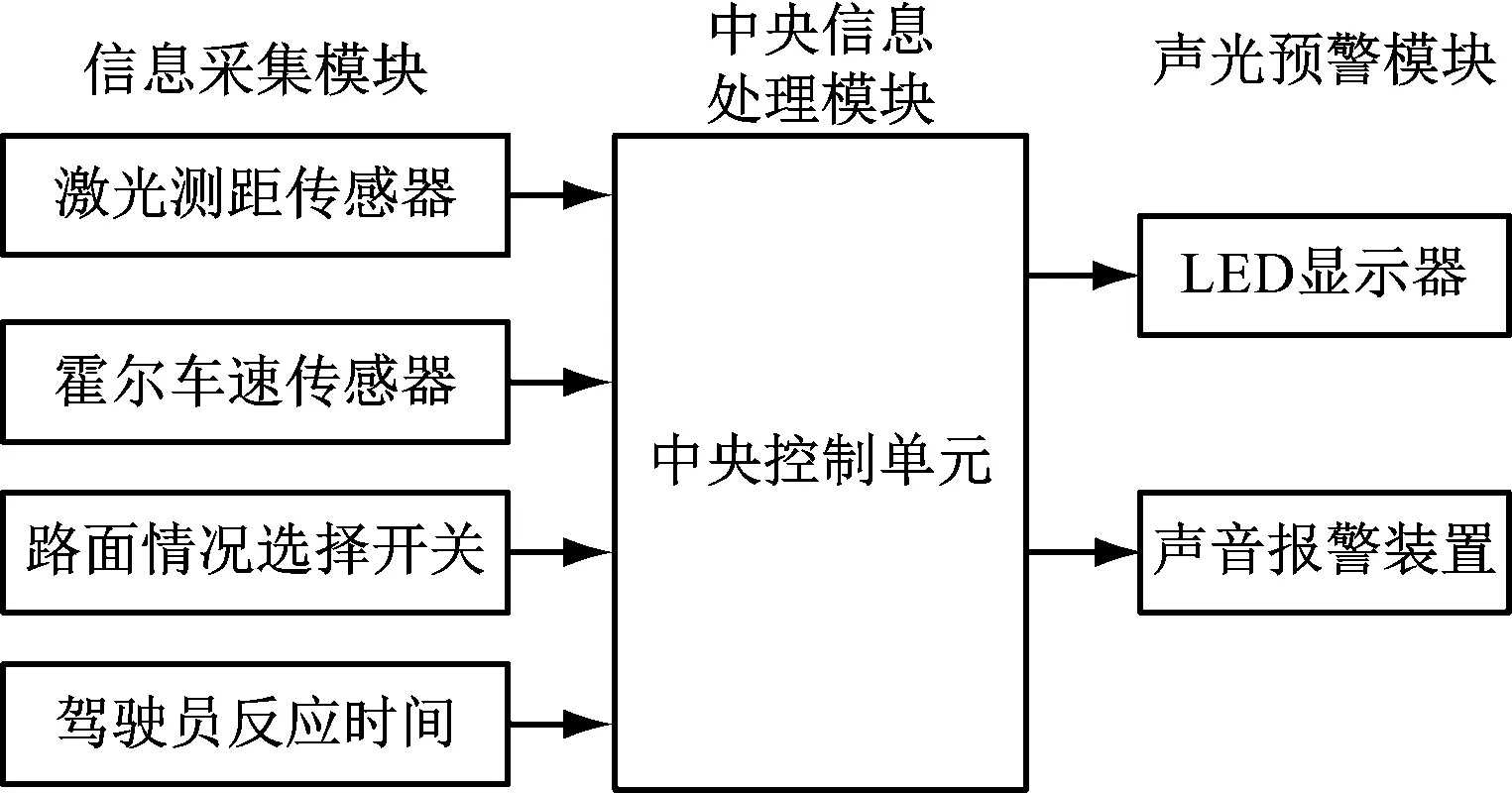
图3 系统总体架构示意图
信息采集模块负责采集自车和前车信息,霍尔车速传感器主要负责测量自车速度以供中央信息处理模块使用;采用测程可达200 m的脉冲激光测距传感器负责完成对自车同前车的间距及路况信息的实时测量功能,并经射频模块向中央信息处理模块传送检测到的参数信息(测距精度在0.15~0.2 m之间);路面情况选择开关主要针对干燥、潮湿和泥浆3种路面进行选择;以实际不同的驾驶员信息及车速为依据输入相应的驾驶员反应时间。选用AT89S52单片机作为处理器的中央信息处理模块主要负责实现对采集到的全部测量参数的分析运算与融合(使用中央处理器完成),可使用同AT89S52所有外设配套的函数库(由ATMEL公司编写)。主要由声光报警器(蜂鸣器,)和 LED 显示器(用于实时显示自车速度及两车的实际距离)构成的声光预警模块主要负责在系统预测到存在追尾碰撞危险时及时向驾驶员发出语音报警提示,避免碰撞事故的发生[5]。
3.2 硬件模块设计
(1) 测距信息接口。AT89S52的电平为 TTL 电平,采用RS232标准通信接口的传感器采集到的数据信息需通过相应接口完成到AT89S52的传送,本文使用MAX232(一种电平转换芯片)实现激光测距传感器测算的距离信息的电平转换后再同单片机接口电路相连。(2) 车速检测模块。该模块主要由霍尔元件H、三极管和光耦开关TLP521构成。将一块正对面安装霍尔元件的磁钢(使霍尔H与磁钢间形成磁场)固定到蜗轮轴转轴上(以霍尔元件的灵敏度为依据对空隙进行调节),转速对应单位时间内的脉冲数(每次霍尔在其正对面面向转动的磁铁时即会发出一次脉冲信号),转轴的转速以I/O 口输出高低电平的个数(指标准数字电路)为依据计算获取,3 脚的低电平在磁场强度到达释放点时向高电平跳变,从而导通三极管和光耦的6、7 脚,此时I/O 输出低电平;3 脚的高电平在磁场强度到达工作点时向低电平跳变,从而截止三极管和光耦的6、7 脚,此时I/O 输出高电平[6]。(3) 基于ISD2560 语音芯片的声光预警模块。AGC 为自动增益控制端,麦克风输入端和补偿端分别对应MIC和MIC REF,连接模拟信号的输入端(ANAIN)和输出端(ANAOUT)的耦合电容的取值一般在0.22~10 μF间,EOM 表示播音结束,高电平的P/R 引脚激活芯片播放提示音功能[7]。
3.3 软件工作流程
设计系统软件时主要包括主程序和判断子程序,系统主程序流程,如图4所示。
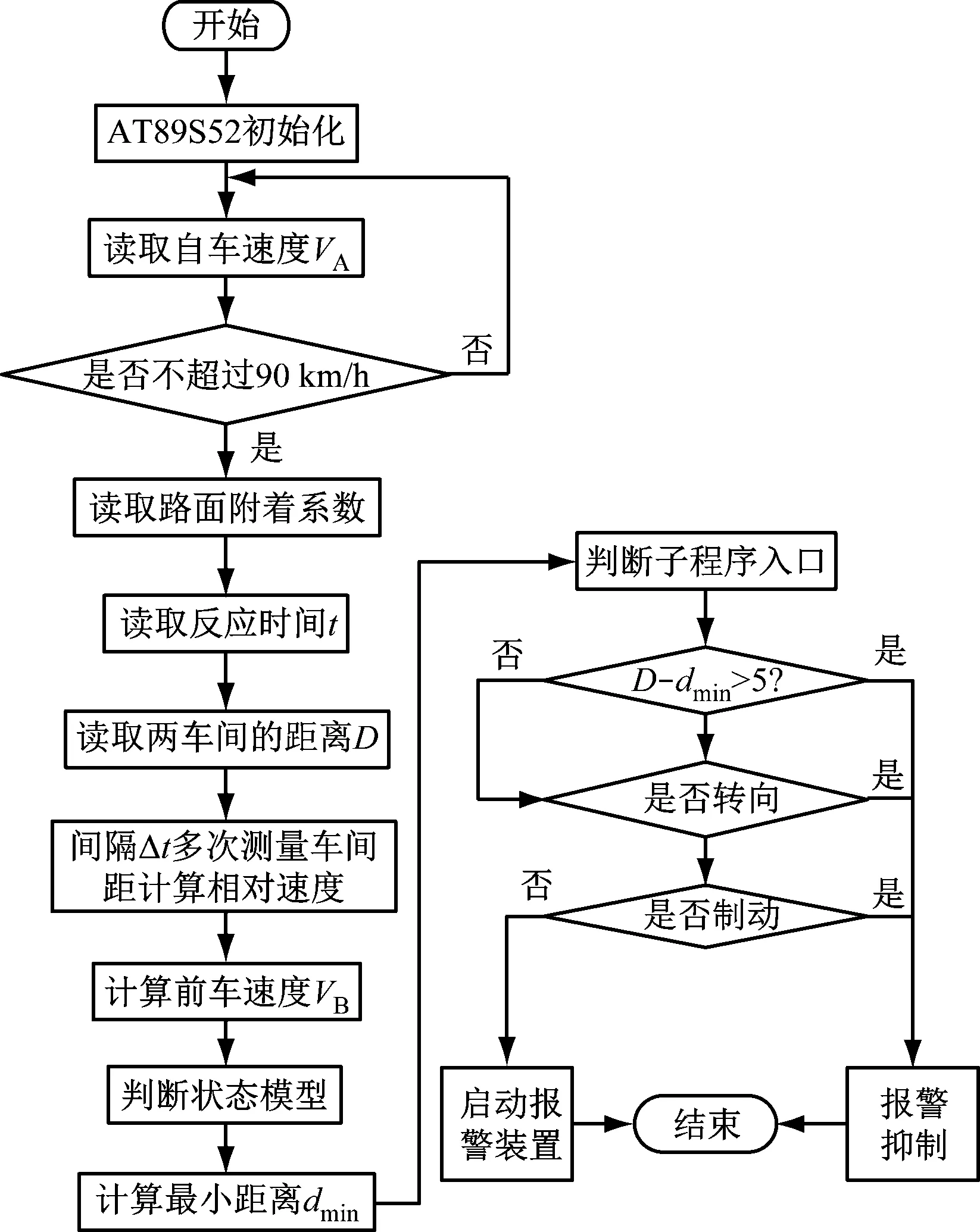
图4 系统主程序算法流程示意图
通过支持 C 语言程序编译功能的Keil-uVision 软件的使用完成系统单片机的调试,初始化单片机 AT89S52后通过信息采集模块完成车速、地面附着系数等信息实时准确的获取,然后以危险报警距离为依据,根据动态车间相对距离差(实测距离与最小纵向距离之差)的计算结果完成对碰撞发生与否的判断,在差值小于5 m的额定安全距离时及时启动报警装置,同时向驾驶员发出转向、刹车等提示信息,紧急情况下控制车辆自动刹车;超过额定安全距离则抑制报警功能[8]。
4 实验测试与结果分析

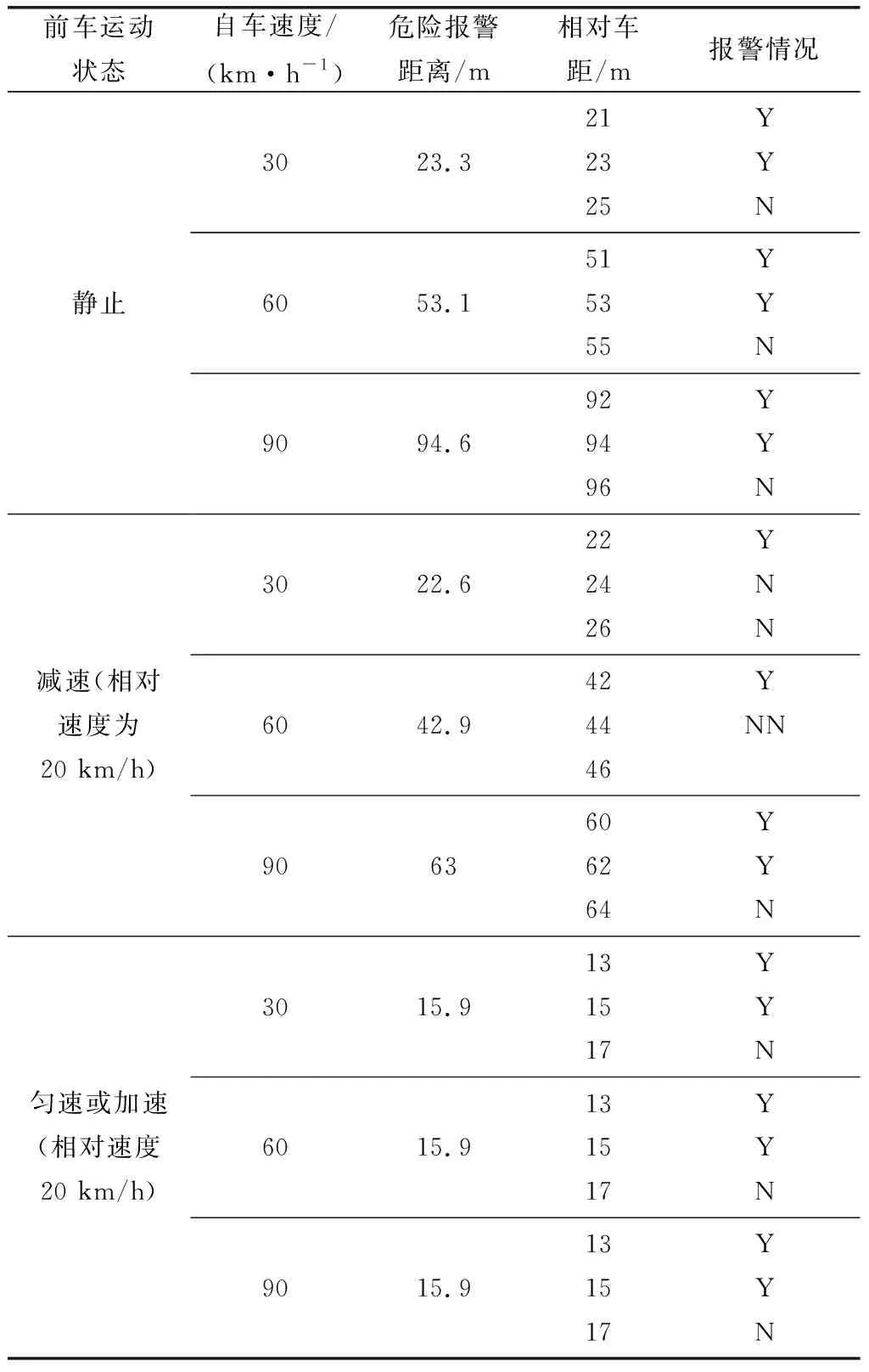
表1 前车不同运动状态的模拟实验数据
该系统在危险报警距离大于两车相对距离时能够及时准确的发出报警提示,达到了预期效果,具有一定的实际应用价值[9]。
5 总结
不断提升的社会经济水平以及家庭生活水平促使汽车逐渐成为不可缺少的代步工具,汽车保有量不断增加,在为日常生产生活带来了极大便利的同时,道路拥堵及交通安全问题日益突出,本文以对汽车防撞原理的分析结果为依据完成了一种防追尾预警刹车系统的设计,详细阐述了系统的硬件构成以及软件功能实现流程,硬件模块可使主要的测距和测速功能得以有效实现。实验仿真结果表明通过该系统可实时准确的检测到前后两车存在的潜在危险并发出警报提示,提醒驾驶员采取刹车等应对措施。
猜你喜欢
汽车维护与修理(2018年1期)2018-04-04
汽车工程(2017年8期)2017-09-15
作文周刊·小学一年级版(2017年27期)2017-08-10
人民交通(2016年9期)2016-06-01
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
汽车维护与修理(2015年5期)2015-02-28
中国自行车·骑行风尚(2014年2期)2014-05-07
汽车电器(2014年8期)2014-02-28
