
基于关节耦合补偿提高机器人绝对定位精度
2021-01-13 12:17刘华辉马忠睿梁旭斌潘海鸿
装备制造技术 2020年10期
陈 琳,刘华辉,马忠睿,梁旭斌,林 志,潘海鸿
(广西大学机械工程学院/实训中心,南宁530004)
0 引言
目前,大多数六自由度工业机器人的重复定位精度在0.1 mm以上[1-2],可以满足电子产品制造、汽车生产、焊接等工业应用的基本要求。然而,随着技术的发展,特别是在航空航天和精密制造领域,机器人的生产需求要求机器人具有较高的绝对定位精度[3-5]。六自由度工业机器人的结构设计中,为增加末端执行器的灵活性和快速响应性,需减轻大小臂和手腕部分的重量,一般是将臂关节和腕关节的驱动电机向腰部(基座)方向移动。这导致部分关节的运动传递线路加长,各关节的运动不可避免地相互影响,即产生耦合运动(称为单向耦合)。机器人关节耦合会导致关节角运动不到位,是影响机器人末端绝对定位精度误差因素[6-7]之一。
目前国内外关于机器人关节耦合运动对机器人绝对定位精度影响的研究较少。韩建达[8]等分析机器人关节加速度反馈解耦控制的开环模型,提出闭环控制策略的设计准则。林义忠[9]等分析耦合运动产生的原因,探讨耦合运动造成的驱动电机的功率冗余现象。王战中[10]等找出耦合运动对手腕运动学和动力学性能的影响规律,并进行动力学仿真,对机器人关节驱动电机的选型提供重要参考意义。
上述研究都是从运动学或动力学的理论仿真层面研究分析机器人关节耦合运动的影响,缺少实际工业环境中研究关节耦合对机器人绝对定位精度的影响。为此,提出用激光跟踪仪实验测试方法衡量关节耦合对机器人末端精度的影响,并用关节补偿策略减少关节耦合的影响,最后通过对比验证其对提高绝对定位精度的有效性。
1 机器人关节耦合比测量方法
1.1 机器人关节耦合比测量方法
靠近六自由度工业机器人基座关节的转动会引起后面关节的转动,类似于一种固定传动比的联动[9],称为关节耦合比。一般将4、5、6关节的驱动电机放在机器人腰部位置,因关节运动传递线路加长导致关节间产生耦合运动,即关节4、5、6之间可能存在的耦合关系。
用激光跟踪仪测量出关节间的耦合角度:
(1)机器人运行至原点位置(所有关节转角值为0°),分别测量靶球与靶标所在位置点(图1),得到关节i和关节j起点位置,记为
(2)通过上位机下发指令使关节i运动角度△θi,此时分别测量靶球与靶标所在位置点,得到关节i和关节j终点位置,记为
(3)下发指令使关节j运动至-60°,利用空间扫描功能,记录靶标所扫过的轨迹,记为Ji;
(4)下发指令使关节i运动至0°,利用空间扫描功能,记录靶球所扫过的轨迹,记为Ji。

图1 靶球和靶标安装位置
用起点Pi及Ji轨迹建立关节i坐标系XiYiZi(图2),通过起点Pi、终点Pi′与关节i坐标系原点间的连线可求出关节实际转动的角度△θi;接着将关节i坐标系绕Zi轴转动△θi角度,得出关节i实际转动坐标系Xi′Yi′Zi′。利用起点Pj在关节i坐标系XiYiZi下的坐标信息,在关节i实际转动坐标系Xi′Yi′Zi′中创建关节j理论终点Pj″。利用终点Pj′及Jj轨迹建立关节j坐标系XjYjZj,则终点Pj′在坐标系XjYjZj中的位置为关节j的实际终点Pj″,将上述创建的理论终点Pj″在坐标系XjYjZj中表示,再将坐标系XjYjZj下的实际终点Pj″和理论终点Pj″转换到柱面坐标系中,则可得到实际终点与理论终点之间的角度差值,该差值即为关节i和关节j之间的耦合角△θi(i=4、5,j=5、6,i<j)。

图2 坐标系转换关系
1.2 机器人关节耦合补偿
由于各关节之间耦合运动的存在,对机器人逆运动学方程获得的关节转角值,要按照耦合运动的耦合比对各关节转角进行补偿,补偿步骤:
(1)将关节i的实际关节转角△θi和关节i与关节j之间的耦合角△θi带入式(1),计算出2个关节间耦合比qij。
(2)假设通过机器人逆运动学方程求解得到的关节i和关节j转角值分别为θi、θj,由于关节耦合只对关节j转角值造成影响,需要对关节j进行补偿,由式(2)计算出补偿后关节的下发关节转角值θ′j。

2 实验验证
2.1 实验平台
以埃夫特ER6B-C60工业机器人搭建实验平台(图3),其主要包括机器人本体、Radian激光跟踪仪(主要性能指标见表1)、电气控制柜等。

图3 埃夫特ER6B-C60型工业机器人实验平台

表1 Radian激光跟踪仪主要性能指标
2.2 机器人关节耦合比测量结果
根据1.1中方法对机器人关节耦合比测量实验。控制机器人关节5转动-90°时,激光跟踪仪测量其实际转动角度为-90.0528°,关节6耦合角度为2.9874°,根据式(1)计算 5,6 关节耦合比:

将计算出的耦合比(-0.0332)补偿到机器人6关节中,重复上述步骤测试补偿后关节5运动-90°时引起关节6的耦合角度仅为0.0078°。表明关节耦合比补偿可提高机器人的关节运动精度。
2.3 关节耦合补偿对绝对定位精度的提高
耦合比补偿对机器人绝对定位精度的影响实验:在机器人的工作空间内任意选择10个位置点,记录上位机下发的名义位置值xn、yn、zn和激光跟踪仪测量得到的实际位置值xc、yc、zc。对比耦合比补偿前后名义位置值和实际位置值的误差。
补偿前三种情况下记录耦合比对机器人绝对定位精度的影响:(1)全部关节转动;(2)5 关节单独转动,其余关节不转动;(3)5关节不转动,其余关节转动。
对6关节耦合补偿后,测量任意关节运动情况下名义位置值和实际位置值的误差。图4分别给出补偿前后机器人末端X、Y、Z三个方向的位置误差及绝对定位误差

图4 补偿前后空间点位置误差
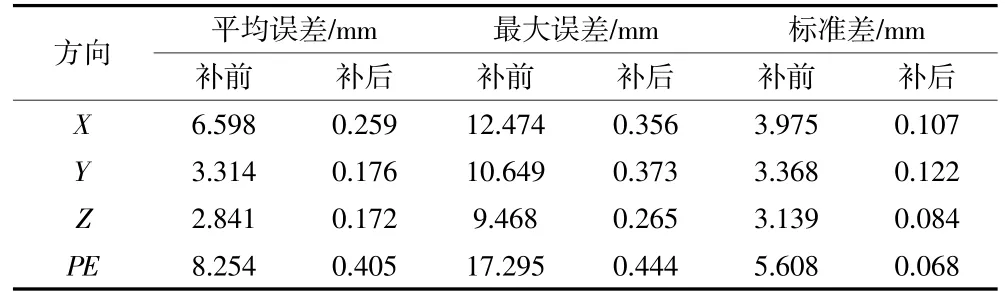
表2 全关节转动10个测试点补偿前后误差结果统计
当机器人全部关节转动和5关节单独转动时,因关节5和关节6存在耦合,补偿前最大绝对定位误差PE达到19.355 mm,补偿后最大误差下降到0.460 mm,误差减少97.62%。当5关节不转动,其它关节转动,补偿前后绝对定位误差相差不大。
统计机器人全关节转动时10个测试点的平均数据(表2):补偿前X方向平均误差6.598 mm,补偿后其下降到0.259 mm;最大误差由12.474 mm下降到0.356 mm;PE平均误差也由8.254 mm下降到0.405 mm,误差减少95.10%。
TCP绕顶针旋转是反映机器人的动态精度。TCP绕顶针实验:测试耦合比对机器人末端动态精度的影响。控制机器人的TCP绕顶针旋转一定角度,测量TCP绕顶尖旋转过程中的最大误差。耦合比补偿前TCP误差约为2 mm(图5a),补偿后误差下降到约1 mm左右(图5b)。上述实验表明通过耦合比补偿后,机器人绝对定位精度和动态精度均得到有效提升。

图5 TCP绕顶尖测试
3 结论
为减少关节耦合对机器人末端绝对定位精度的影响,通过激光跟踪仪测量出关节耦合的角度,并计算出关节耦合比,将其补偿到关节运动中。补偿后的关节耦合角度相对于补偿前有明显下降,机器人末端平均绝对定位精度提高95.10%。可有效减少因工业机器人存在关节耦合的情况,对机器人末端绝对定位精度和动态精度造成的影响。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
雷达学报(2017年1期)2017-05-17
探测与控制学报(2015年4期)2015-12-15
