
基于遗传算法比例积分微分控制器的铅冷快堆堆芯功率控制
2021-02-23 13:52贺三军惠天宇段天英曾文杰王贤伟
科学技术与工程 2021年2期
贺三军,惠天宇,段天英,曾文杰*,王贤伟
(1.南华大学核科学技术学院,衡阳 421001;2.中国原子能科学研究院反应堆工程技术研究部,北京 102413)
比例积分微分(proportion integration differentiation,PID)控制器是核反应堆堆芯功率控制系统中常用的控制器之一。然而,PID控制器参数在整个控制过程中一经取定就不再变化,对堆芯功率控制过程存在着适用性低的问题[1]。针对PID控制器参数的整定和优化,胡宗镇等[2]采用反向传播(back propagation,BP)神经网络对PID控制系统参数进行整定;刘霞等[3]基于衰减曲线法整定PID参数;汤伟等[4]利用遗传模糊免疫算法实现PID控制器参数整定优化。遗传算法(genetic algorithm,GA)是一种通过模拟自然进化过程搜索最优解的方法,因其可以通过随机搜索寻得最优解的特点[5-7],可用于PID控制器参数整定。
铅冷快堆的缓发中子份额小、中子代时间短,存在外界干扰时自平衡能力较弱等问题[8-9],传统PID控制器难以有效实现对堆芯功率的控制。为解决这一问题,基于遗传算法参数整定的PID控制器,建立铅冷快堆堆芯功率控制系统,研究在堆芯反应性和堆芯冷却剂进口温度的扰动下堆芯的响应情况。
1 堆芯模型的建立
1.1 堆芯非线性模型
根据铅冷快堆堆芯运行的基本原理,采用集总参数法建立铅冷快堆堆芯非线性模型如图1所示,其中包括点堆动力学模型、热传输模型、反应性反馈模型[10]。

图1 铅冷快堆堆芯运行的物理模型
(1)
式(1)中:t表示时间;Pr表示堆芯相对功率;P0表示堆芯初始功率;cir表示第i组缓发中子先驱核相对密度;ρ表示引入堆芯的总反应性;βi表示第i组缓发中子份额;β表示缓发中子总份额;λi表示第i组缓发中子先驱核衰减常数,s-1;Λ表示堆内瞬发中子平均寿命,s;Mf、Mc、Ml分别为燃料、包壳和冷却剂铅的质量;Tf、Tc、Tl分别为燃料温度、包壳温度和铅的平均温度;Tf0、Tc0、Tl0分别为燃料温度、包壳温度和铅的初始平均温度;Tin为冷却剂铅的入口温度;Tin0为冷却剂铅的初始入口温度;Cf、Cc、Cl分别为燃料、包壳和冷却剂的热容;Γ为铅的质量流量;kfc为燃料与包壳间的传热系数;hcl为包壳与冷却剂间的传热系数;αD为多普勒反应性反馈系数;αz为轴向膨胀反馈系数;αr为径向膨胀反馈系数;αl为冷却剂密度反应性反馈系数;ρrod为控制棒引入的反应性。
1.2 堆芯状态空间模型
根据堆芯非线性模型,将控制棒输入反应性和堆芯冷却剂进口温度设为输入量,堆芯相对功率偏差和冷却剂铅的平均温度偏差设为输出量,利用微扰理论对堆芯非线性模型进行线性化处理。处理后可得到堆芯线性化模型。
(2)
依据式(2),建立堆芯状态方程模型:
(3)

A、B、C、D的表达式为
(4)
(5)
(6)
(7)
2 堆芯功率控制器设计
2.1 基于遗传算法的PID参数整定
考虑到传统PID控制器的参数是依靠经验公式和凑试的方法得来的,缺乏适用性和稳定性[11]。故采用遗传算法优化搜寻PID控制参数,来寻求全局最优的控制器参数。
利用遗传算法对PID控制器的参数进行优化设计[12-14],过程如图2所示。优化过程如下:在MALTAB编辑器运行程序,首先随机产生初始种群,将种群中的个体依次赋值给堆芯控制器的比例系数Kp、积分系数Ki和微分系数Kd,然后运行Simulink中的仿真模型计算出该组参数对应的性能指标,适应度函数采用误差性能指标中的误差绝对值时间积分(ITAE)性能指标[15],其定义为
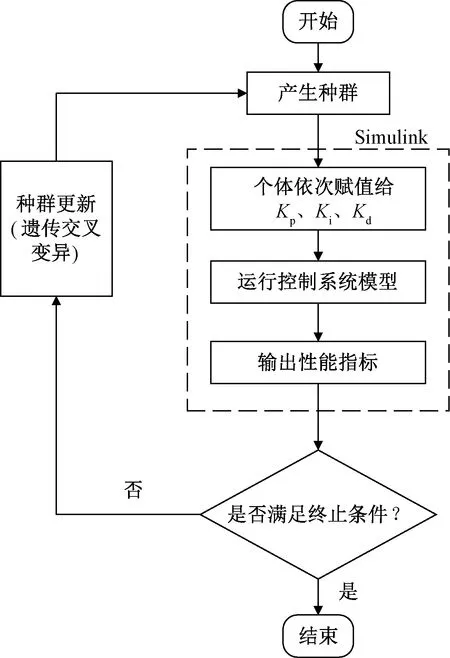
图2 遗传算法优化PID的过程示意图

(8)
式(8)中:t为系统运行时间;e(t)为系统误差。
计算出性能指标后将其传递到预先设置的适应度函数中作为该个体的适应值,通过个体的适应值与预设适应值进行比较从而判断是否可以结束算法,最终得到优化后的PID参数,并将优化后的参数直接导入Simulink模型中作为PID控制器的参数,运行后便可实现对堆芯仿真系统的控制。
2.2 堆芯功率控制系统
以控制棒的反应性和堆芯冷却剂进口温度为输入量,堆芯相对功率偏差和堆芯冷却剂平均温度偏差为输出量,建立了如图3所示的堆芯功率控制系统[16](K为微分价值,1/s为积分器)。当反应堆参考功率发生变化时,将实测功率与参考值进行比较,并将误差信号送入控制器。经控制器处理后,将误差信号传送给棒速控制器,并改变控制棒的位置,以调节输入的反应性,从而调节反应堆堆芯功率。
在MATLAB/Simulink环境下,结合图3,基于堆芯状态空间模型,使用遗传算法PID控制(GA-PID)技术,建立如图4所示铅冷快堆堆芯控制系统。

图3 铅冷快堆堆芯功率控制系统结构图

图4 铅冷快堆堆芯功率控制系统
3 堆芯动态仿真与分析
3.1 堆芯反应性扰动仿真
借助铅冷快堆堆芯功率控制系统,在100% FP(full power)堆芯初始稳态功率水平下,开展堆芯反应性扰动仿真。在2×103s时通过移动控制棒分别引入50 pcm和100 pcm的反应性扰动,并比较有无控制器情况下的堆芯响应情况,仿真结果如图5~图8所示。
如图5(a)所示,在无控制器的情况下,引入堆芯反应性阶跃扰动后,堆芯相对功率逐渐上升后,最终达到稳定,但与初始状态偏离较大。如图5(b)所示,在有控制器的情况下,堆芯相对功率在短时间内达到峰值后迅速下降,最终趋近于1;还可以看出在使用遗传算法PID控制器后,超调量和响应时间明显小于PID控制器。从图6(a)中可以看出,反应性扰动引起了堆芯冷却剂平均温度上升8 ℃,此时堆芯内响应情况与初始状态偏差较大。同时由图6(b)可得,在使用控制器后,堆芯冷却剂平均温度偏差随着堆芯内相对功率趋近于初始状态也逐渐趋近于0,达到平衡状态;图7、图8与对应的图5、图6所示趋势几乎一致。因此可以看出,遗传算法PID控制器的超调量和响应时间要小于PID控制器,遗传算法PID控制器的控制效果要优于PID控制器。

图5 50 pcm反应性阶跃扰动下的堆芯相对功率变化

图6 50 pcm反应性阶跃扰动下的堆芯冷却剂温度变化

图7 100 pcm反应性阶跃扰动下的堆芯相对功率变化

图8 100 pcm反应性阶跃扰动下的堆芯冷却剂温度变化
3.2 堆芯进口温度扰动仿真
在100%FP堆芯初始稳态功率水平下,开展堆芯进口温度扰动仿真。在0.001 s时分别引入2、4 ℃的进口温度阶跃扰动,比较有无控制器情况下堆芯响应情况,仿真结果如图9~图12所示。
如图9(a)所示,引入堆芯冷却剂进口温度扰动后,在无控制器的情况下,相对功率从1 s左右开始下降,稳定在0.982的输出值上,可以看出进口温度扰动对堆芯相对功率的影响不大;如图9(b)所示,在有控制器的情况下,引入温度扰动依然可以使相对功率在短时间内回到初始状态,即在控制器的调节下,进口温度扰动对堆芯相对功率影响很小。由图10(a)可得,引入温度扰动会使冷却剂平均温度发生变化,略微增加后趋于稳定;从图10(b)可以看出,在遗传算法PID控制器和PID控制器的作用下,冷却剂平均温度变化基本一样,近似等于进口温度扰动,高于无控制器作用下的堆芯冷却剂平均温度偏差。类似地,在引入4 ℃进口温度扰动的情况下,图11、图12与对应的图9、图10所示趋势几乎一致。

图9 2 ℃进口温度阶跃扰动下的堆芯相对功率变化

图10 2 ℃进口温度阶跃扰动下的堆芯冷却剂温度变化

图11 4 ℃进口温度阶跃扰动下的堆芯相对功率变化
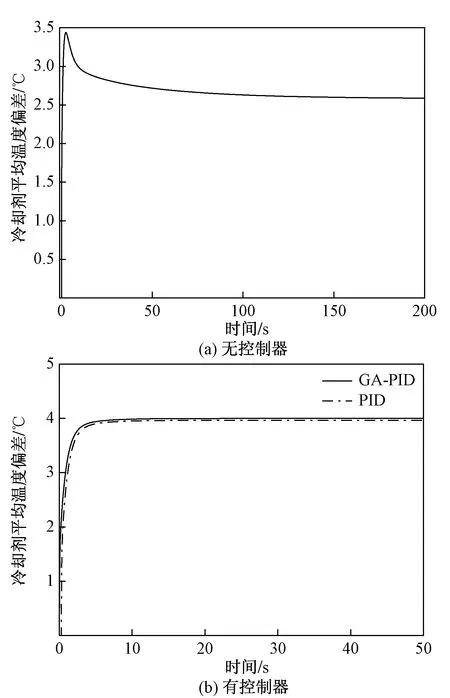
图12 4 ℃进口温度阶跃扰动下的堆芯冷却剂温度变化
4 结论
以铅冷快堆堆芯为研究对象,采用集总参数法构建铅冷快堆堆芯非线性模型,利用微扰理论将堆芯非线性化模型转化为堆芯状态空间模型,在MATLAB/Simulink环境下设计基于遗传算法参数整定的PID控制器,建立铅冷快堆堆芯功率控制系统,利用此控制系统开展堆芯反应性和堆芯冷却剂进口温度扰动仿真。得出如下结论。
(1)在外界扰动下,PID控制器可以实现对堆芯功率的良好控制。
(2)与PID控制器相比,遗传算法PID控制器有着更优的控制效果和适用性。
猜你喜欢
国外核新闻(2022年8期)2022-11-24
核安全(2022年3期)2022-06-29
科技视界(2021年12期)2021-06-04
汽车维修与保养(2021年11期)2021-03-11
中国核电(2020年3期)2020-08-13
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
舰船电子工程(2019年9期)2019-09-27
舰船电子工程(2018年12期)2019-01-03
汽车文摘(2016年5期)2016-05-31
