
基于三维激光扫描技术的竖井联系测量及应用研究
2021-03-08 02:16王智梁显宏李效超孙晓丽周志
城市勘测 2021年1期
王智,梁显宏,李效超,孙晓丽,周志,3
(1.青岛市勘察测绘研究院,山东 青岛 266032; 2.青岛市西海岸基础地理信息中心有限公司,山东 青岛 266555;3.青岛市地下空间地理信息工程研究中心,山东 青岛 266032)
1 引 言
竖井联系测量是将工作井上面的地面坐标和高程传递到井下,以便于在工作井下面进行开挖作业等建设工作[1]。对于几十米左右深度的竖井,如地铁施工竖井,主要采用吊钢丝的方法,即先在工作井顶部搭接固定的钢架,在钢架上悬挂两根钢丝,钢丝末端悬挂重锤伸到竖井底部,为确保钢丝稳定,通常将重锤放置于阻尼液中[2],分别在工作井顶部和底部的两根钢丝上粘贴反射片,在井上、井下适当位置处架设全站仪测量反射片的边角关系,进而解算出井下控制点的坐标[3],高程则需要悬挂钢尺进行传递,该方法作业烦琐,占用工作井时间长,仅搭接钢架、悬挂钢丝以及等待重锤稳定的时间就要至少1个多小时[4]。而对于深度较大的矿井巷道等工程,传递坐标则通常采用陀螺仪[5],该方法虽然前期准备工作短,但是陀螺仪设备昂贵,常规型号精度低,且测量时间较长,因此在常见的竖井联系测量中应用较少[6]。
三维激光扫描技术是近些年快速发展的测绘新兴技术,其可在短时间内获取待测物体表面海量的三维空间数据[7],其测量成果不仅包含空间坐标信息,还包含反射率等物理信息[8],通过不同测站三维点云的拼接、匹配,可实现空间三维坐标的传递。研究采用三维激光扫描技术进行竖井联系测量传递的方法,以一个电力管井联系测量为例,介绍现场作业过程及注意事项,分析了点云拼接的影响因素,并根据匹配后的三维点云绘制了电力管井的平面图和剖面图,探讨了该方法的适用场景。
2 数据采集
2.1 工作井顶部标靶测量
某电力管井因周边区域施工建设,需要实测该电力管井的平面图及剖面图,查明电力管井与施工区域的空间位置关系,以便于对地下空间结构应力的变化等因素进行相关施工影响评估,需要实测、评估的两个电力管井之间长度约130多米,深度约 20 m,由于没有已知测绘资料可利用,需要将井上的平面坐标和高程传递到井下,为此需先在工作井顶部地面区域布设控制点。地面观测示意图如图1所示。
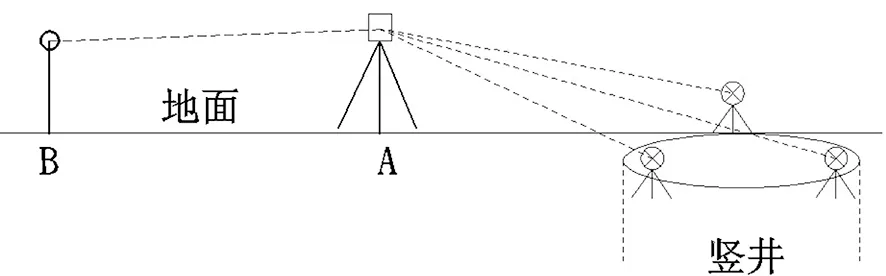
图1 地面观测示意图
在工作井地面附近布设两个图根控制点A和B,可采用基于城市CORS下的RTK模式进行作业,大地高经高精度似大地水准面模型精化得到正常高,两个图根点应相互通视,且间距足够长,以保证后续全站仪设站定向有足够的精度,点A应距工作井较近,以便于全站仪精确瞄准标靶进行观测。在工作井顶部安置3个标靶,现场安置位置如图2所示,标靶可以旋转,但标靶中心在旋转过程中始终不变,安置时需使标靶能够和点A通视,同时保证将标靶正面旋转向下时,能够和竖井底部通视。
准备工作做好后,将3个标靶正面旋转至朝向点A方向,在点A架设全站仪,后视定向点B,观测工作井顶部的3个标靶中心,获取其三维坐标,为保证观测精度,应盘左盘右多测回观测。至此,地面观测工作结束。

图2 工作井地面标靶布设图
2.2 工作井底部三维扫描测量
在工作井底板采用三维激光扫描仪进行作业,作业前,将工作井顶部3个标靶的正面旋转至朝向竖井底部。将扫描仪安置于竖井底部,使其扫描头与竖井顶部3个标靶能够通视,同时,在电力管井的延伸方向再放置3个标靶,以用于第1测站的点云和第2测站的点云能够拼接成一个整体。根据工作竖井的深度等现场环境设置扫描仪的测量密度等参数,井下第1站扫描结束后,沿着电力管井方向将仪器安置于第2站,同时将竖井顶部的3个标靶撤离,并将其安置于第2站的前进方向,以此方法,沿着电力管井方向进行三维扫描作业,每相邻两个测站之间利用3个标靶进行拼接,作业示意图如图3所示。
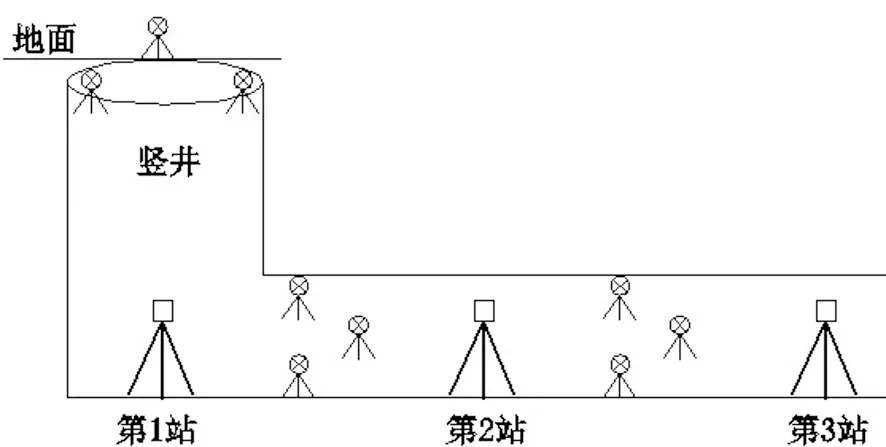
图3 井下三维扫描测量示意图
实际井下作业过程中,共需要6个标靶,即除了第1站和最后1站以外,其他每个测站的前后各有3个标靶,3个标靶应视现场具体情况尽可能分散开,且宜有一定的高度差,标靶与扫描仪的距离应根据扫描仪的测量密度及现场通视情况而定,每一站测完后,应通过仪器屏幕显示功能对扫描结果进行预检。在该电力管井地下测量过程中,由于地下空间狭窄,受现场电力设施等影响通视条件差,每个测站与标靶的距离控制在 10 m之内。
3 点云处理及精度分析
3.1 点云拼接配准及预处理
内业需先对点云进行拼接处理,即将各个测站的点云拼接成一个整体,拼接时分别在两个测站的三维点云视图中依次选择3个同名标靶,然后进行匹配,为提高拼接精度及可靠性,除了选择3个标靶外,还可以选择其他空间特征点参与匹配计算。其计算原理为空间坐标转换[9],即第1个测站的三维点云为基准,根据两个测站同名标靶点的坐标计算空间转换参数,并以此参数将第2个测站的三维点云转换到第1个测站三维点云基准下。常用的转换模型为布尔沙七参数转换模型[10],转换公式如下:
(1)
上式中,(X2,Y2,Z2)是转换前三维坐标,(X1,Y1,Z1)是转换后三维坐标,(TX,TY,TZ)是3个平移参数,D是比例参数,(RX,RY,RZ)是3个旋转参数。
点云拼接完成后,需要将点云转换到当地绝对坐标系下,其起算点采用竖井顶部安置的3个标靶,在三维点云中对竖井顶部标靶区域进行优化放大,依次提取3个标靶的中心,如图4所示,借助于黑白标靶特有的反射强度对比信息,可准确地捕捉标靶中心位置,对提取的3个标靶中心按照全站仪测量获取的结果进行统一编号,在后处理软件中,导入3个标靶的全站仪测量结果,进行绝对坐标匹配,匹配后电力管井三维点云如图5所示。

图4 标靶中心提取点云图

图5 匹配后电力管井三维点云图
经拼接、配准后的原始三维点云具有密度高、数据量大、噪声多等特点,在进行后续成果应用之前需先对点云进行预处理,预处理操作主要包括点云优化、点云去噪滤波以及点云分割等操作[11],处理流程图如图6所示。
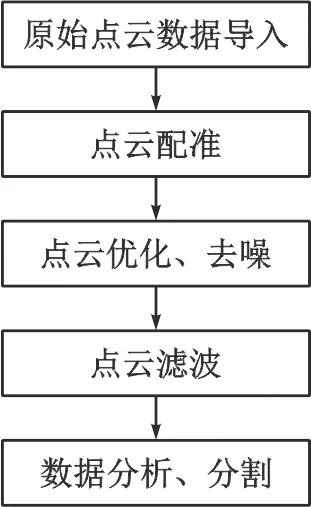
图6 三维点云预处理流程图
点云优化包括点云统一化、抽稀等操作[12],点云统一化是将原始各个测站独立的点云文件合并成一个整体,从而便于后续统一操作的过程,由于原始数据量大,点云密度高,需要进行一定的抽稀操作[13],最常用的方法是设置一定的点云间隔,比如 1 cm,即三维点云中点平均间距为 1 cm,抽吸后的点云数据量将大大减小,便于导入其他第三方软件中进行相应的分析处理,点云去噪滤波是通过一定的算法将点云中不需要的区域进行删除的过程[14],如由于现场环境影响在空中形成的漂浮状、散乱的点云,常用的处理方法有空间单元格法、KD-tree法、八叉树法等[15]。经预处理后的三维点云将更加平滑、有序,为后续成果应用分析做准备。
3.2 成果应用及精度分析
根据工程需要,需要绘制电力管井的平面图和剖面图以评估周边建设对该电力管井的影响,调整三维点云空间视图,使其竖直Z轴向上,框选所需绘制区域,让其独立显示,旋转至侧视图,根据三维点云在空间的高低形态,建立两个切片,保证两个切片之间的空间区域均能覆盖电力管井的范围,调整两个切片的间距,使切片之间的厚度便于后续绘制线画图,另存切片之间的点云在新的视图中显示,并调整至俯视图状态,根据点云走向采用直线或样条曲线进行描绘,描绘完得到电力管井的平面图,同样方法绘制电力管井的剖面图,结果如图7所示,其中上方平面图中左边圆圈为电力管井测绘的始发井,即作为起算点的3个标靶安置的位置,自左向右进行三维扫描传递测绘,至右边圆圈第2个电力管井的位置结束。

图7 电力管井平面图和剖面图
为验证基于三维激光扫描手段进行竖井联系测量及管井测绘传递的精度,在该工程中,地下管井三维扫描一直测至第2个管井,即图7中上图右边圆圈位置,在地面上,借助于GNSS接收机、全站仪等仪器测定井盖中心的三维坐标。在匹配后的三维点云中,裁切出管井和地面贴合部位的三维点云,由于现场环境及井盖区域的不规则性,井盖区域不是一个正圆,借助于点云后处理软件中的空间拟合功能,拟合出贴近井盖最佳形状的空间圆,进而提取出拟合圆的中心三维坐标。该坐标和在地面上用全站仪实测坐标对比如表1所示。
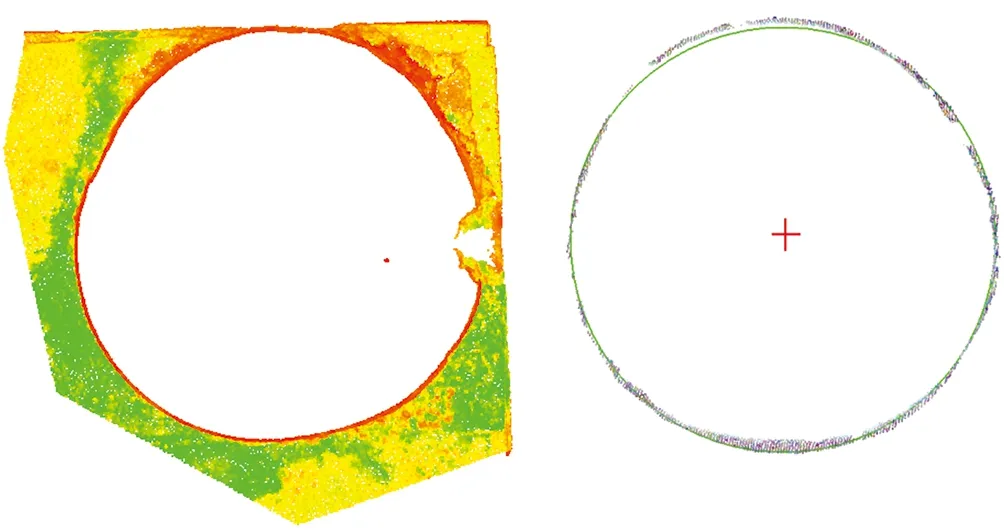
图8 电力管井圆心拟合示意图

管井坐标对比表 表1
从表1可以看出,从地面用全站仪实测的井盖坐标和在三维点云中拟合的坐标较差基本上都在 3 cm左右,其精度能够满足常规的市政建设需要。该较差也反映了从起始地面3个标靶传递至第2个管井三维扫描的精度,该精度和多个因素有关,首先和地面采用全站仪测量3个标靶的精度有关,采用的仪器越精密,现场作业越科学,获取的标靶精度也就越高;其次,和始发井地面3个标靶的安置有关,其直接决定了三维点云匹配精度,3个标靶之间距离越大,即井口越大,匹配精度越高;再者,和地下管井三维扫描作业方式及管井现场环境有关,若管井环境差,直径窄,就影响现场每两个测站之间标靶的安置,从而影响拼接精度;第四,和地下设站的数量有关,设站数量越多,拼接后传递的精度就越差,反之,设站数量越少,拼接精度越高;另外,和扫描仪本身精度、测程以及扫描密度等参数设置都有关系。
4 总 结
三维激光扫描技术为竖井联系测量提供了新的解决方案,与传统采用的吊钢丝、陀螺仪测量等方法相比,其现场作业效率更高,且扫描仪能够突破常规仪器只能测量空间有限点位的弊端,可以快速获取待测管井的三维空间海量点云数据,从而建立地下空间全面、客观、真实的三维场景,有助于后续二次分析应用。
受制于扫描仪自身测程等性能影响,基于三维激光扫描进行竖井联系测量适用于井深在二三十米之内场景,若井口较宽,适用的井深也就更大,其联系测量传递精度和多种因素有关,作业时应根据现场情况合理布设标靶,以获取最佳的拼接、匹配精度,若井内地下区域没有其他控制点进行校正,则该方法在地下传递延伸的距离不宜过长。
猜你喜欢
工业安全与环保(2022年5期)2022-05-17
海河水利(2021年1期)2021-01-06
郑州大学学报(工学版)(2020年6期)2020-02-23
资源信息与工程(2019年3期)2019-07-01
测绘工程(2018年3期)2018-03-20
黑龙江科学(2015年17期)2015-03-27
中国水利(2015年6期)2015-02-28
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
