高速电主轴自动松锁刀装置的设计
2021-03-17 11:05王生怀袁海兵
中国工程机械学报 2021年1期
李 然,王生怀,袁海兵
(湖北汽车工业学院机械工程学院,湖北十堰442002)
随着“中国制造2025”的不断推进,数控设备在装备制造业中占据着越来越重要的地位。高速电主轴是数控机床的核心模块,其松锁刀可靠性是企业高效率生产的重要保证。自动松锁刀装置是高速电主轴的重要部件,换刀时间以及对刀具夹持的快速性、准确性、牢靠性会对高速数控机床的加工质量和加工效率产生较大的影响[1-2]。目前,高速电主轴较多采用蝶形弹簧式和液压(气压)驱动式松拉刀机构,实现刀具的夹紧或松开。蝶形弹簧式松拉刀机构[3-4],拉刀力取决于蝶形弹簧,拉刀力不稳定,对工件加工精度有一定的影响;液压(气压)驱动式松拉刀机构[5-7],电主轴动平衡性好,夹紧力稳定可靠,适用于摆动铣头等高转速、大功率的电主轴中。但是,液压缸的动作需要依靠PLC(Programmable Logic Controller)和行程开关控制,液压缸只有接收到行程开关或PLC的控制信号才可以执行下一个动作,这样需要较长的控制辅助时间,生产效率偏低。
基于伺服驱动[8-9]和谐波减速传动[10-11]原理设计的高速电主轴自动松锁刀装置,主要包括松锁刀伺服电动机、谐波减速机构、松锁刀驱动机构和松锁刀执行机构,谐波减速机构差齿传动带动松锁刀驱动机构中的滚珠丝杠副运动,进而驱动松锁刀执行机构松开或锁紧刀具。
1 自动松锁刀装置整体结构设计
高速电主轴自动松锁刀装置主要由松锁刀伺服电动机、谐波减速机构、松锁刀驱动机构以及松锁刀执行机构等组成。松锁刀装置的结构简图如图1所示。

图1 松锁刀装置结构简图Fig.1 Structure diagram of self-locking device
图1 中沿A-A的剖视图如图2所示。
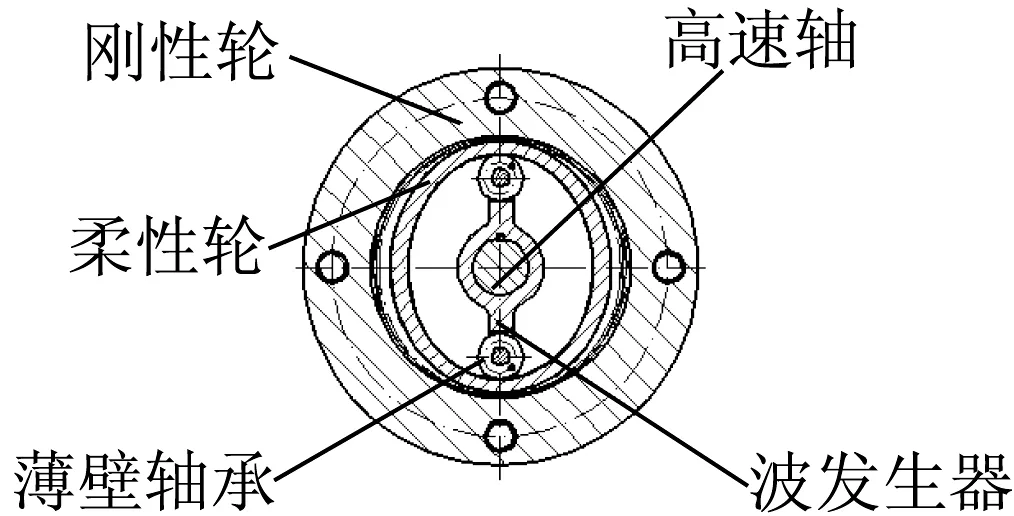
图2 A-A剖视图Fig.2 A-A section view
1.1 谐波减速机构
由图1~图2可知,谐波减速机构主要由高速轴、波发生器、薄壁轴承、柔性轮、刚性轮、低速轴、左体和右体等组成。高速轴固定在右体内且与波发生器相连,在波发生器上相对其回转中心均布有薄壁轴承,刚性轮固定在左、右体之间,在钢性轮上加工有内齿轮,柔性轮与低速轴连接,在柔性轮上加工有外齿轮,波发生器上的薄壁轴承与柔性轮接触,在接触部位柔性轮与刚性轮啮合,非接触部位柔性轮与刚性轮脱开。刚性轮和柔性轮模数相同,齿数不同,刚性轮齿数Zg比柔性轮齿数Zr多n个齿,即Zg-Zr=n,当波发生器旋转360°/n时,将迫使柔性轮相对于刚性轮位移一个齿距,低速轴将旋转一定的角度。谐波减速机构刚性轮固定时的传动比[12-13]为

合理设计刚性轮和柔性轮的齿数,在整个松锁刀装置体积基本不变的情况下,谐波减速机构的减速比可以达到70~500。
1.2 松锁刀驱动机构
松锁刀驱动机构的结构如图3所示,松锁刀驱动机构主要由推力轴、支撑体、滑轴、弹簧、推板、滑套、滚珠丝杠以及丝杠螺母等组成。在谐波减速机构的低速轴上加工有滚珠丝杠,滚珠丝杠与丝杠螺母相配合,丝杠螺母通过导向键与滑套相连接,丝杠螺母可以在滑套内移动,但不能转动;推板通过螺钉与滑轴固定连接,推板上方通过螺钉、弹簧连接在支撑体上,在弹簧力的作用下,滑轴有向右移动的趋势,使滑轴与推力轴分离。
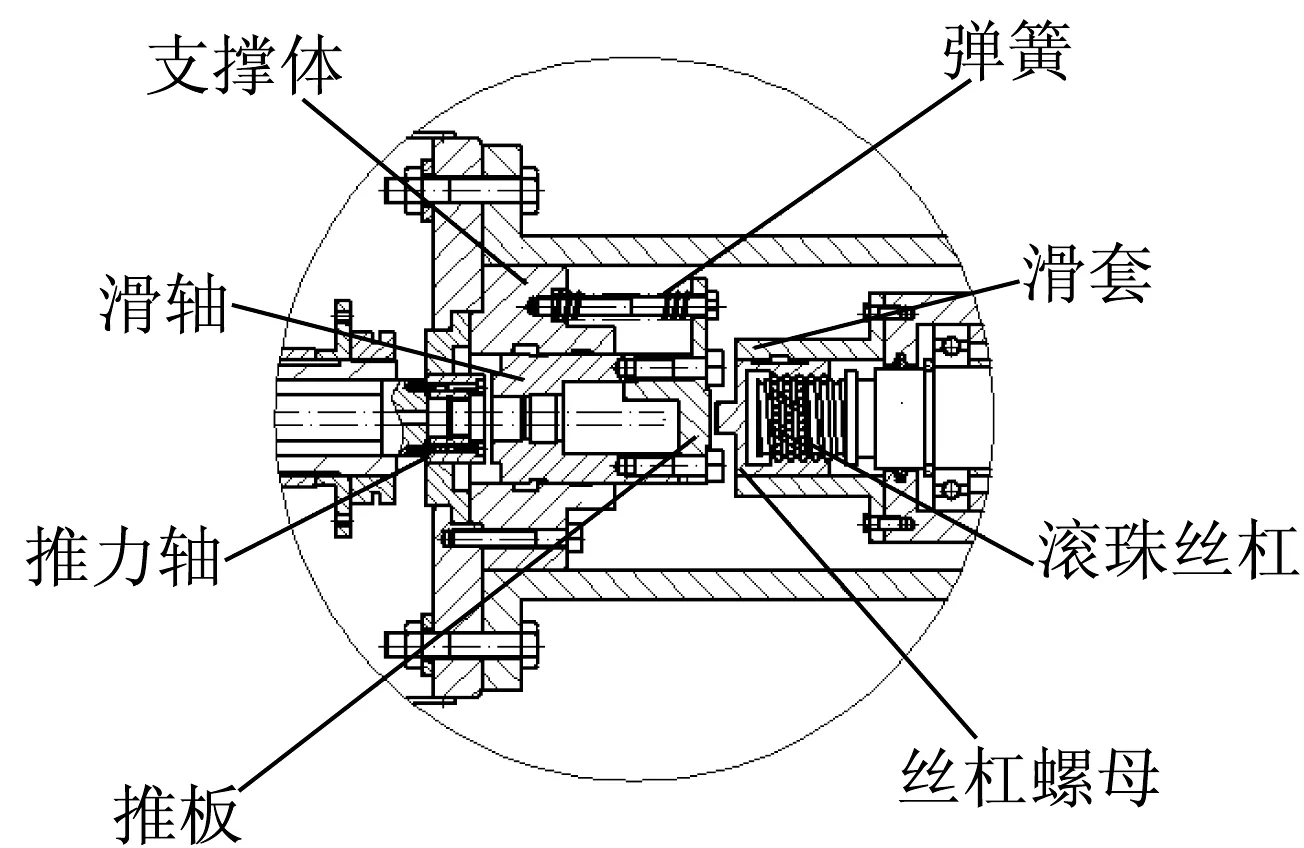
图3 松锁刀驱动机构Fig.3 Self-locking driving mechanism
1.3 松锁刀执行机构
松锁刀执行机构的结构如图4所示,松锁刀执行机构主要由弹性卡爪、电主轴、蝶形弹簧以及拉杆等组成。由图1和图4可知,拉杆与推力轴固定连接,在拉杆的外圆柱上(电主轴的内孔中)有序、反向安装有若干蝶形弹簧,弹性卡爪安装在拉杆左端的环槽以及电主轴的内孔中,刀具安装在弹性卡爪的内孔中。
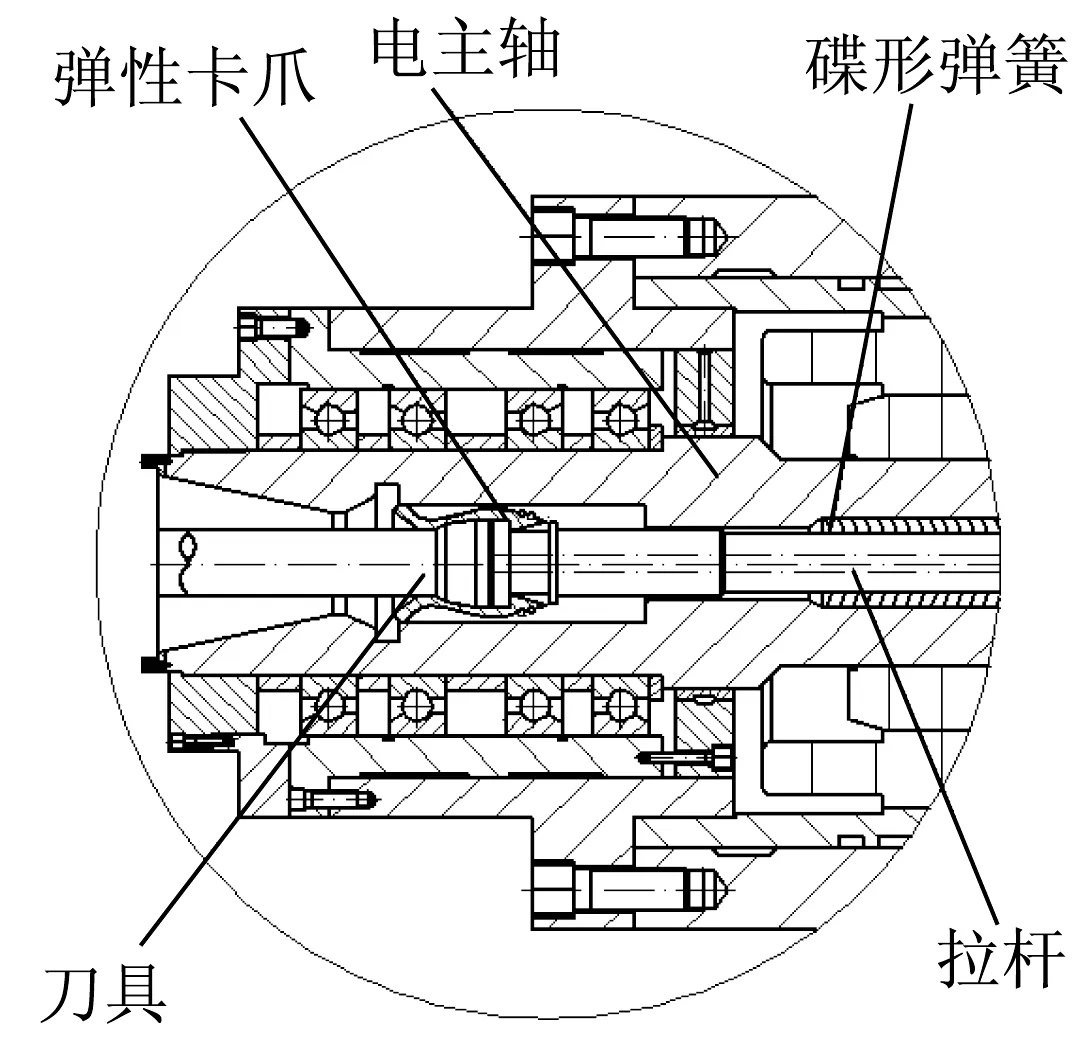
图4 松锁刀执行机构Fig.4 Self-locking actuator
整个高速电主轴自动松锁刀装置,由松锁刀伺服电动机通过谐波减速机构驱动松锁刀驱动机构运动,进而推动松锁刀执行机构夹紧或松开刀具,其运动和动力传递的路线如图5所示。
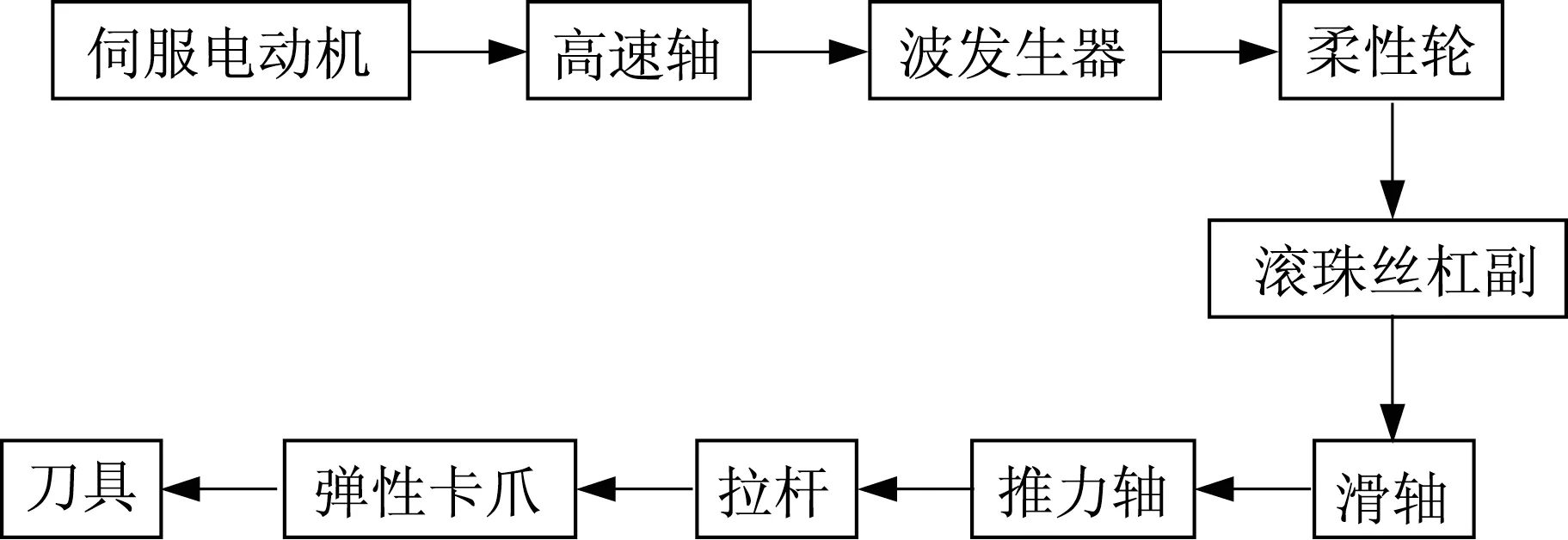
图5 运动和动力传递路线Fig.5 Movement and power transmission route
2 夹紧力的理论分析和计算
松锁刀执行机构刀具夹紧部分可以简化为如图6所示的力学分析模型。
由图6(a)可知,刀具可沿着弹性卡爪轴向移动,当不考虑弹性卡爪的弹性变形(即弹性卡爪与刀具之间不存在径向间隙)时,根据对夹紧力的分析可知

式中:N为刀具对弹性卡爪的反作用力,N;Q为电主轴拉杆轴向拉紧力,N;α为弹性卡爪与电主轴的接触角,(°);β为弹性卡爪与电主轴的摩擦角,(°)。
由图6(b)可知,由于弹性卡爪与刀具之间存在着径向间隙Δ,则式(2)中应减去弹性卡爪在夹紧刀具之前消除径向间隙所需的弹性变形力R,则刀具夹紧力为

在计算弹性卡爪的弹性变形力时,将弹性卡爪等效为左端固定、右端受力R而产生变形Δ/2的悬臂梁,则弹性卡爪每一瓣夹爪变形所需的夹紧力为
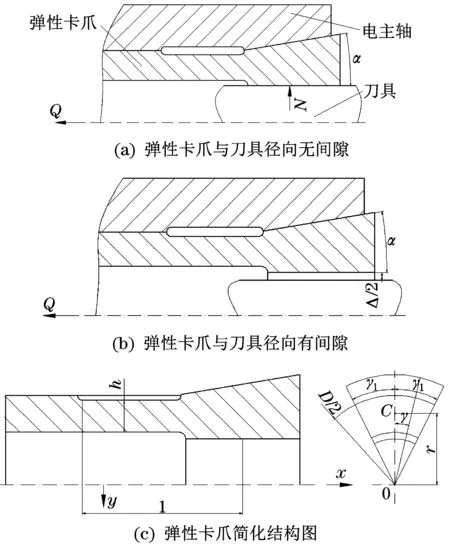
图6 夹紧力力学分析模型Fig.6 Mechanical analysis model of clamping force

由图6(c)可知

式中:
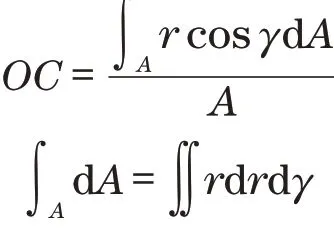
将以上式子带入式(5)可得
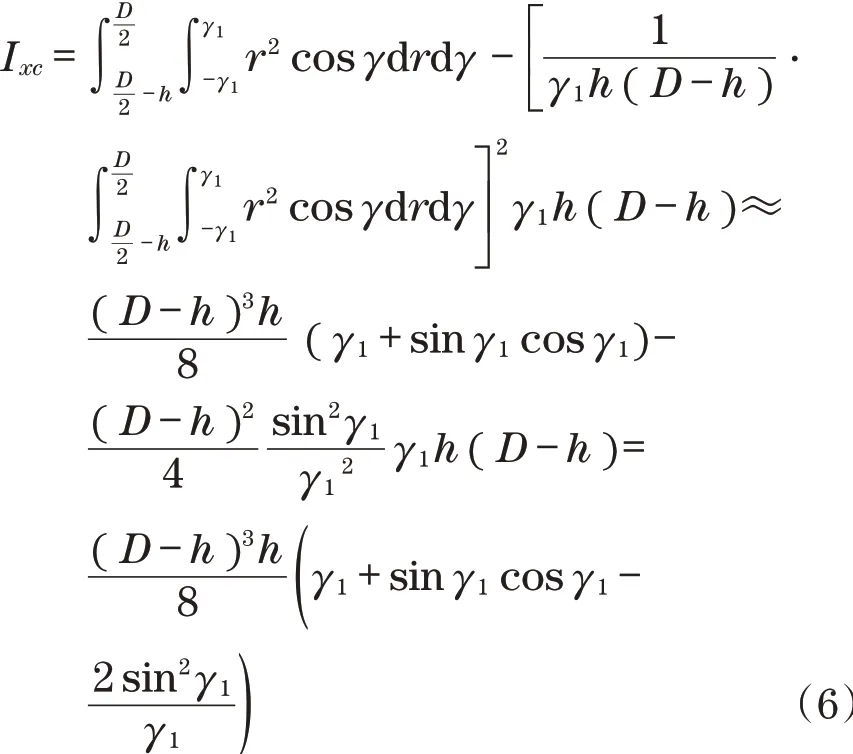
将式(6)带入式(4)可得
对于多夹爪而言
将式(7)带入式(3)得到刀具的夹紧力为
式中:n为弹性卡爪的夹爪瓣数;D为夹爪弹性部分外径,mm;h为夹爪弹性部分厚度,mm;l为夹爪左端弹性部分到右端锥面中部的距离(悬臂长度),mm;E为夹爪的弹性模量,GPa;Δ为弹性卡爪与刀具径向间隙,mm;γ1为弹性卡爪每瓣夹爪所占扇形角的一半,rad。
由图4可知,电主轴拉杆轴向拉紧力Q由蝶形弹簧提供:

滚珠丝杠副中丝杠转角θ1和螺母位移x之间的关系为

将式(10)带入式(9),并结合图1中的传动关系可得

式中:m为蝶形弹簧数目;ks为蝶形弹簧刚度,N/m;x0为蝶形弹簧预压缩量,mm;Ph为丝杠导程,mm;Zg为刚性轮齿数;Zr为柔性轮齿数;θ为伺服电动机转角,rad。
将式(11)带入式(8),可得刀具最终的夹紧力为
由式(12)可知,刀具夹紧力的影响因素主要体现在松锁刀执行机构的结构以及中间传动环节,如谐波减速机构的减速比、滚珠丝杠副的传动比及传动精度等,谐波减速机构的减速比可以在70~500的范围内变化,刀具夹紧力范围宽,可以达到5~115 kN。结合以上分析,可以根据实际加工所需的刀具夹紧力合理设计高速电主轴自动松锁刀装置的机械结构。
3 结语
本文基于伺服驱动和谐波减速传动原理,设计了高速电主轴自动松锁刀装置,该装置在结构上进行了创新设计,采用了谐波减速机构、滚珠丝杠副等中间传动环节;通过建立刀具夹紧力数学模型,研究了刀具夹紧力的影响因素,主要体现在松锁刀执行机构的结构、谐波减速机构减速比、滚珠丝杠副传动比及传动精度等。谐波减速机构减速比可以在70~500的范围内变化,具有体积小、重量轻、惯性小、速比高、负载能力强的优点;自动松锁刀装置刀具夹紧力范围宽,达到5~115 kN,可广泛应用于加工中心、数控机床等高速机床中,使用柔性好;松锁刀装置采用开环伺服驱动控制,不需要检测装置,控制辅助时间短,生产效率高,加工精度高。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
汽车实用技术(2022年19期)2022-10-19
天然气与石油(2022年4期)2022-09-21
内江科技(2021年3期)2021-04-04
机械制造与自动化(2020年3期)2020-07-16
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年8期)2017-11-27
浙江大学学报(工学版)(2016年11期)2016-06-05
设备管理与维修(2015年12期)2015-12-25