基于改进小波变换的自动化电气设备故障点检测
2021-03-19 05:18姚钢黄济
齐齐哈尔大学学报(自然科学版) 2021年2期
姚钢,黄济
(1.六安职业技术学院 汽车与机电工程学院,安徽 六安 237000;2.皖西学院 实验实训教学管理部,安徽 六安 237012)
在科学技术日益更新的大背景下,电气设备变得更加智能化以及自动化,但相对应的设备结构变得更加复杂,容易出现故障,由于复杂的结构导致设备故障的排查较为困难,需要一种可以对设备故障点进行确认的新方法[1-3]。而国内外对于设备故障点检测的研究起步均较晚,早期的故障检测只能采用人工手段,后续随着行波法的诞生,人们开始采用阴极射线示波器来进行设备故障点检测,通过对行波从故障点的传播时间来确定设备故障点的位置。但该方法准确率不高,同时需要事先发现故障[4-7]。而我国在本世纪80年代才开始对行波保护技术开展研究,虽然起步较晚,但通过研究也获得了很多成果,如后续研究中出现的基于Bergeron 法的电磁暂态分析技术,运用电磁波的暂态分析来确认位置。而目前研究中通常运用梯度扩散的技术,对故障信号进行确认,但由于信号获取时效率较低,影响检测的准确率[8-10]。而小波变换技术,由于具有较好的故障信号接收能力,对设备故障点检测方法存在应用的潜力,存在研究价值。
1 自动化电气设备故障点检测方法设计
1.1 电气设备特性分析
电气自动化设备的输电环境温度的改变,其内部交流电阻也会发生变化[11]。当环境温度达到上限时,交流电阻的表示公式如下所示:
式(1)中,R '代表电气设备中的线芯处在温度上限情况下的直流电阻,单位为Ω/m。 ys代表线路中的集肤效应因数, yp代表线路中的相邻效应因数。在环境温度达到上限时,单位长度下的直流电阻则可以用如下公式表示:
式(2)中,A 代表线芯的横截面积,设电气设备中的线芯由n 根直径相同的导线构成,且直径为d,获得线芯横截面积, ρ20代表电气设备内线芯的电阻率,α 代表线路的温度系数常量,θ 代表电气设备环境温度的上限值。1k 代表电气设备在单根线芯施加外力下的线芯电阻参数。2k 则代表通过多根线芯构成的线芯电阻率。3k 代表高强度下的导线硬度参数。4k 代表线芯绞合参数。5k 则代表导线最大长度参数。根据式(1),(2)即可得出该电气设备在环境影响下的电气特性。分析设备的电气特性是为了避免由于环境因素造成的故障信号异常,提高检测工作的准确度。在完成特性分析后,可以根据电气特性开展故障点检测工作。
1.2 添加数字滤波器
为了抑制干扰信号,在进行信号处理中可以使用数字滤波技术来进行信号过滤[12-13]。本文为了避免在进行传输过程中造成的失真和噪音影响,在检测过程中添加数字滤波器,数字滤波器的处理过程如图1 所示。
本文为了满足需要设计IIR 数字滤波器,根据一定的规则来对数字滤波器的数字指标进行转换,同时模拟滤波器的低通技术指标。将获取的技术指标作为模拟低通滤波器 H (s )的设计标准。将根据技术指标模拟出的低通滤波器 H ( s )转换为高通滤波器 H (z )。转换过程时通过双线性Z 变换法来设计IIR 低通滤波器,函数为
1.3 小波变换分析
当式(4)满足时,那么可以将母小波ψ(t )看作一个衰减震荡波,其中e-jωt为平方可积函数,dt 代表信号的频宽。在满足式(4)后,小波函数经过变换后获得小波函数,则小波变换结果满足:
式(6)即为离散的小波变换,通过对小波分析的离散以及重构,实现多频分量分析向着低频分类进行逐级分析与处理,以此获得对应电气设备的信号波动错误,从而得出电气设备是否存在故障。
1.4 故障点确定
在经过小波分析后获得的信号波动错误,可根据信号奇异性来确认故障点位置。本文获取的信号波动错误函数为 x ( t)∈ R,该函数具有点或阶的导数不连续性,则该信号点属于奇异性,奇异性信号的突变点同样具有奇异性,突变点的性质常用的奇异性指数α 表示,α 也可以作为奇异性函数 x ( t )的特征。这里设置常数K,并让奇异性函数中所有奇异点t 均满足以下条件:
式(7)中, t0代表突变奇异点,如果上式成立,那么则称x ( t )中的 t0的奇异指数为α ,同时α 指数至少为1,但当α= 1时,函数 x (t )在点 t0上则是光滑不存在突变的。而对突变点的突变信息则可以通过能量比法来获得,在时窗内可将获取到的突变奇异点的突变程度进行确定,通过对时窗的选取获得到相应的信号噪声比,当利用奇异性分析后,根据获取到的信号奇异点,确定信号时窗宽度,在较长线路中可以采用双端检测,利用故障点信号在反射行波中在初始行波中的反馈结果,获取到故障点的大致位置,并利用双端测距法对故障点距离进行测距,测距公式如下:
式(8)中,l 代表电气设备线路总长度,1Mt 代表M 端首波头的时刻,1Nt 代表N 端首波头的时刻,υ 代表波速。根据式(8)对信号波到故障点之间的距离进行确认,从而推算出设备的故障点位置。
2 实验论证分析
为了验证设计的基于改进小波变换的自动化电气设备故障点检测方法的可行性,设计实验使用本文故障点检测方法与文献[1, 2, 4]的故障点检测方法对某公司的自动化电气设备进行故障点检测,并通过4 种方法之间相关函数以及检测的准确率来判断优劣性。
2.1 实验信号采集设备
实验信号采集设备采用微电子STM32F103ZET6 单片机作为数据处理中心,该单片机的内置处理器处理能力较强,同时具有32 位ARM Cortex M3 内核的处理器。而对于故障信号的数据采集则采用两部分,首先为信号的处理电路,其次为A/D 转换。为了获得质量较好的故障信号,信号处理电路汇中添加了信号的放大电路,电路如图2 所示。
在一般情况下利用信号放大器对实验中被检测设备故障信号进行放大处理,从而获得更可靠的故障信号。
2.2 实验结果
由于自动化电气设备的故障信号中的行波浪涌到达测试点的时间较短,因此在检测过程中,4 种检测方法均需要将检测的相关函数曲线集中在自动化电气设备线路的首端。根据信号函数理论,故障信号的检出越准确,那么相对应的函数曲线峰值则越高,同时呈现出多峰值。相关函数理论中,相关函数的曲线峰值可以代表电气设备故障的定位,上述4 种方法的相关函数曲线如图3 所示。由图3 可以看出,本文设计的自动化电气设备的故障点检测方法的相关函数曲线峰值更高,同时具有的峰值更多,从信号函数理论中说明该方法的检测效率更高。而4 种方法的故障点检测的准确率比较结果如表1 所示。
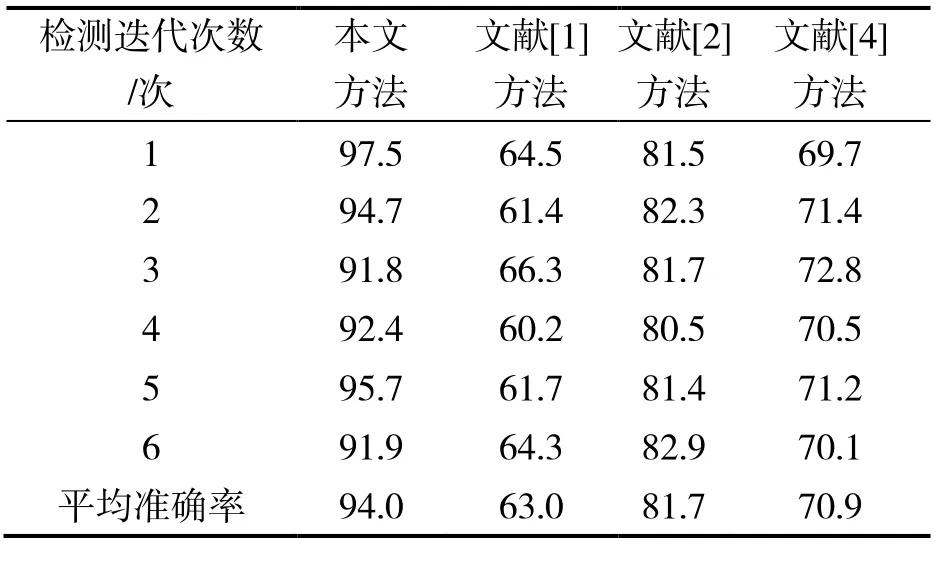
表1 4 种方法的检测准确率 %
表1 中的结果显示,在多次检测迭代中,本文所设计的电气故障点检测方法对比其他文献的检测方法,检测准确率均较高。
3 结束语
本文使用改进小波变换技术设计了自动化电气设备故障点检测方法,通过实验证明本文方法的相关函数曲线中峰值更多,同时检测的准确率更高。但本文研究的故障点检测仍不具备对故障分类的能力,未来研究中可以在其中添加MATLAB/SIMULINK 模型,提高噪声的过滤能力,同时添加神经元网络,对故障信号的故障类型进行分析。
猜你喜欢
商品与质量(2021年43期)2022-01-18
建材发展导向(2021年12期)2021-07-22
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04