激光雷达云台开发
2021-04-24 11:06曾加柱洪鑫龙王世龙覃柏伟
科学技术创新 2021年8期
曾加柱 洪鑫龙 王世龙 覃柏伟
(中国民航大学,天津300000)
云台作为光电一体化设备的载体,可搭载激光雷达、监控摄像头、探照灯等设备,以实现设备自由度和工作空间的扩展。大型云台的应用上有农业机器人云台、全海深水下云台,农业机器人云台在农业生产中具有农作物喷洒、园林监控等作用,水下云台技术常应用于摄影拍摄、水下结构监控和水下机器人作业设备中。此款激光雷达云台即是在便携式云台及较大型电动云台的基础上,进行云台结构设计的补缺与控制性能的增强。
1 结构设计
1.1 云台材料选择
根据设计需求,本云台应具有5kg 的载重要求,所以云台材料的选择既要满足载重情况下不发生形变的强度要求,也要降低云台内部转动机构的性能损耗。因此云台的俯仰运动机构以及用于安装电机、传动轴、齿轮、轴承的水平转动机构采用高强度铝。云台底座配合俯仰和水平运动,用于承载云台整体自重且内部无设计运动部件,故采用强度更高、密度更大的铸铁材料。
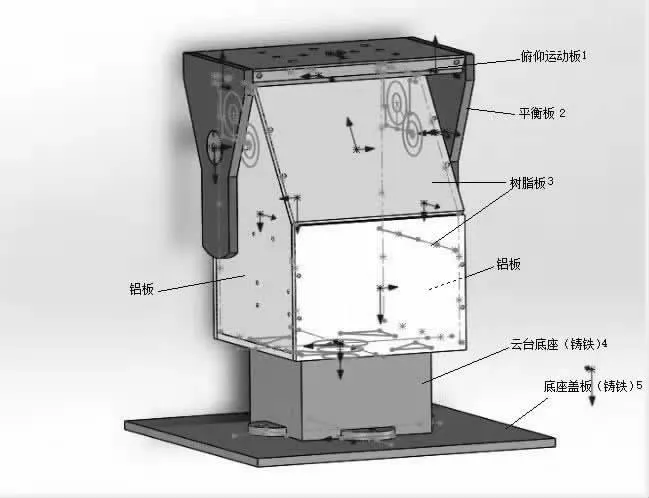
图1 激光雷达云台结构
1.2 俯仰转动机构
与激光雷达连接的俯仰运动板块1,其尺寸为250*160 厚度为6,并在其上开孔,用于云台与雷达、载重物等兼容连接。平衡板块用于俯仰运动板与俯仰运动轴连接。平衡板2 的尺寸为上部160 下部70 高度200,上部到下部逐渐缩短,此平衡板与俯仰运动板通过螺钉螺母配合连接。平衡板通过螺孔与固定法兰轴座螺钉螺母连接,法兰座与俯仰运动轴无头内六角螺丝连接,可以实现俯仰运动轴带动平衡板转动,进而带动俯仰平台和载重物做俯仰运动,如图1。
1.3 水平转动机构
水平转动机构分为用于装载电机、安装转动机构、轴承的部分和用于承载云台整体质量的底座部分。为安放电机支架、轴承、轴及连接板材需在A、B、C、D 各板材上打光孔。为整体美观又尽量减轻自重,在中部没有承重板材覆盖区域设计树脂板3材进行覆盖。用于承载云台整体重量的底座4 是通过板材焊接形成中空的五面立方体,其尺寸为150*150*100 厚度8mm。在此底座上部设计挖空槽并在槽内打上螺纹孔用于放置固定水平转动作用轴的固定法兰轴座。用螺钉螺母将云台底座开口一面与一块铁板5 连接封底,此铁板尺寸为350*350*8。
2 机械传动设计
2.1 俯仰运动
俯仰运动传动设计,电机通过电机支架固定于水平转动机构的上方,轴向为水平方向。通过一对齿数40 和80、模数为1的齿轮将步进电机扭矩传递到俯仰运动轴上,通过电机的转动齿轮的传动从而带动俯仰运动轴转动。俯仰运动轴为一根轴径10mm 长度250mm 的光杆轴,其转动即可以带动所设计的俯仰转动机构运动。
2.2 水平运动
水平运动传动设计电机通过电机支架固定在水平转动机构内,轴向为竖直方向。通过一对齿数40 和80、模数为1 的齿轮将步进电机轴产生的扭矩传递到水平转动作用轴。水平转动作用轴为一根外径16mm 内径10mm 长度200mm 的空心轴,此轴底部用固定法兰轴座与底座固定连接,这根轴的上部通过轴承与水平转动机构内部连接。与俯仰运动不同,所设计的水平转动是水平转动作用轴和固定在这根轴上的齿轮相对地面不转动,而是与电机轴相连接的齿轮绕水平作用轴做圆周运动。
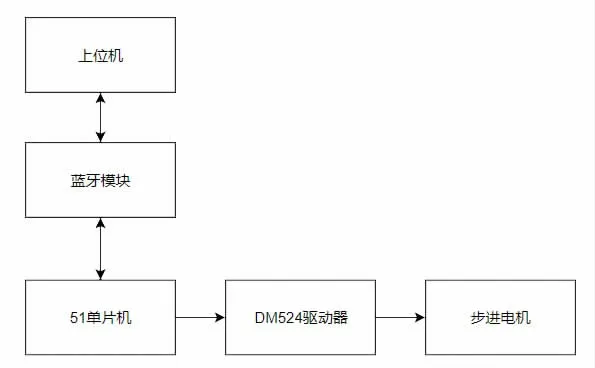
图2 步进电机控制系统框图
3 控制电路设计
控制电路使用51 单片机,远程控制部分采用HC-05 蓝牙模块。控制电路如图2 所示。
3.1 单片机
单片机选用51 单片机,作为基础入门的单片机,其虽然结构简单,但能够很好的完成对于步进电机的基本控制。控制芯片选用STC89C516,其是STC 推出的新一代超强抗干扰/高速/ 低功耗的51 单片机,它是采用8051 核的ISP(In System Programming)在系统可编程芯片,指令代码完全兼容传统的8051 单片机。
3.2 步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。云台使用的电机为57 步进电机,其为两相四线制步进电机,主要特点是低噪音、大力矩、运行稳定。电机四线为A+、A-、B+、B-,当按照A+、A-、B+、B- 的顺序输送脉冲时,电机正转,当按照A-、A+、B-、B+的顺序输送脉冲时,电机反转。
3.3 步进电机控制器
步进电机控制器选用的是DM524 低热量数字驱动器。驱动器的供电电压可达48V(DC),输出的电流峰值可达4.2A,电气隔离采用了光隔离,输入可以共阴、共阳、差分信号,脉冲最高响应频率200KHz。驱动器的优点为低速零震动,且噪音及小,以及抗干扰能力强,在电网恶劣的环境里,可以实现高精度定位。其广泛应用于自动包装机、点胶机、雕刻机等自动化设备,对于以前用到有震动和噪音较大的用户有明显改善。驱动器的应用范围为所有法兰盘为42、57 步进电机以及86 电机机身长度在80毫米以下所有电机。
DM524 有三个接口,分别为信号接口、电机接口、电源接口。信号接口的PUL+和PUL-为控制脉冲信号正端和负端;DIR+和DIR-为方向信号正端和负端;ENA+和ENA-为使能信号的正端和负端。电机接口的A+和A-接步进电机A 相绕组的正负端;B+和B-接步进电机B 相绕组的正负端。当A、B 两相绕组调换时,可使电机方向反向。电源接口采用直流电源供电,工作电压范围为20-50VDC,电源功率大于100W。
驱动器有红绿两个指示灯。其中绿灯为电源指示灯,当驱动器上电后绿灯闪烁;红灯为故障指示灯,当出现过压、过流故障时,故障灯常亮。故障清除后,红灯灭。当驱动器出现故障时,只有重新上电和重新使能才能清除故障。
驱动器可以改变其细分程度来调整步进电机旋转的精度,当控制器细分精度为3200 步/ 转时,步进电机每步转动360/3200=0.1125°,当步进电机需要转动90°时,步进电机走过的步数,即控制器接受到的脉冲为90/0.1125=800。
3.4 蓝牙模块
远程控制初步的方案分为WiFi 控制、红外控制及蓝牙控制。WiFi 控制受限于网络的波动,不能满足激光雷达对于精度的要求。而红外控制的距离相较于蓝牙控制较短,所以远程控制最终选用蓝牙控制。上位机蓝牙连接单片机蓝牙模块,对单片机的串口发送信息,单片机接受到信息后,对步进电机驱动器发出相应的指令,步进电机转动相应的角度。
蓝牙模块选用HC-05,其是一款高性能的主从一体蓝牙串口模块,可以同各种带蓝牙功能的电脑、蓝牙主机、手机、PDA、PSP 等智能终端配对,该模块支持非常宽的波特率范围:4800~1382400,并且兼容5V 或3.3V 单片机系统。
3.5 电源
云台由220V 转24V 的直流开关电源供电。开关电源是通过控制电力电子器件周期性的开通和关断,对输入的电压进行脉宽的调制,从而实现调节输出电压和自动稳压的功能。开关电源具有小型、轻量化、高效率的特点。开关电源的效率比线性电源高,因为开关电源工作时,晶体管多在饱和区与截至区切换,耗散较低。而线性电源工作时,晶体管工作在放大区,本身消耗电能。开关电源耗散低从而产生的热量小,不会影响激光雷达的正常工作。
4 实验结论
通过云台外型结构进行初步设计并利用仿真软件进行模拟,验证了云台结构强度的可靠性。选用57 型步进电机能够满足云台载重5kg 的要求,选用51 单片机系统加装蓝牙模块能够实现对于云台的远程控制。该实验验证了加装了控制器的步进电机有良好的闭环控制性能,而51 单片机系统可以通过简便稳定的控制完成对于云台旋转的精细操作。
结束语
激光雷达云台是一种二自由度云台,可以协助激光雷达高效、快速的实现工作任务。本文介绍了关于激光雷达云台的机械结构设计以及控制电路的设计,通过两个步进电机实现云台水平以及垂直方向的旋转,控制电路加装蓝牙模块,可以通过远程控制信号操控云台,调整激光雷达的扫描区域。电机选用了带控制器的步进电机,在兼具一定闭环控制能力的同时,又降低了云台的成本。此款雷达云台在航空航天、户外设备及特种设备等领域都有着很好的应用场景。
猜你喜欢
农业工程学报(2022年4期)2022-04-24
宝藏(2021年8期)2021-09-15
汽车观察(2021年8期)2021-09-01
北华大学学报(自然科学版)(2021年3期)2021-07-13
摄影之友(影像视觉)(2020年2期)2021-01-14
电脑爱好者(2020年6期)2020-05-26
影像视觉(2020年2期)2020-03-19
铁道通信信号(2020年10期)2020-02-07
电子制作(2019年23期)2019-02-23
汽车电器(2017年1期)2017-12-06