基于改进型CLEAN算法三维成像的雷达散射截面积反演
2021-05-29 08:16任浩田廖可非
科学技术与工程 2021年11期
任浩田,廖可非,2*
(1.桂林电子科技大学信息与通信学院,桂林 541004;2.桂林电子科技大学卫星导航定位与位置服务国家地方联合工程研究中心,桂林 541004)
雷达散射截面积(radar cross section,RCS)是衡量目标散射能力的一个重要物理量,如何精确地测量RCS成为关键[1]。基于成像的RCS测量技术所具有的三维分辨能力,可以更好地将目标从环境噪声中分离开来,且具有测量成本低,便于外场和近场测量等一系列优点[2],在此基础上展开进一步的研究。
由于传统三维成像是由真实的散射系数卷积上点扩展函数来获得[3],而点扩展函数存在旁瓣,因此成像无法避免各个点之间存在旁瓣串扰,造成每个点的像并不能有效地反映真实的散射系。而CLEAN算法作为雷达散射中心提取[4-5]的一个有效方式,它可以有效降低三维成像的旁瓣。
CLEAN算法最早被应用于射电天文领域中,用以重构更加接近真实的天空亮度分布[6]。并最早由Tsao和Steinberg引入雷达成像中[7],该算法通过反卷积来消除点扩展函数的旁瓣效应,以此提高成像的质量。研究表明,CLEAN 算法不仅是一个消卷积过程,还是一个逆滤波过程,且具有很高的信噪比[8]。近年来该算法在雷达信号检测,距离像旁瓣抑制,以及雷达二维成像方面得到了广泛的应用和发展[9-14]。文献[15]在距离向上使用序列CLEAN的一种新型能量消除方案,抑制了来自点和分布式目标的模糊能量。文献[16]采用相干CLEAN消除随机相位分集多普勒滤波器组输出中的旁瓣泄漏,并提出了一种同步相干CLEAN,以此解决来自相似强度的多个信号分量的旁瓣伪影的交叉污染。根据点扩展函数消卷步骤的不同,还有许多其他改进的CLEAN算法,如 Lean CLEAN[17]和Active CLEAN[18]等。
目前CLEAN算法还很少应用于三维成像当中,现着重将CLEAN算法应用于面阵三维成像的RCS测量中,用以改进成像质量。当场景中存在少量的点目标时,CLEAN算法处理效果较好,但随着场景目标散射中心个数增多,以及目标变得复杂时,CLEAN算法处理效果不再精确。针对CLEAN算法存在的累计估计误差,设计一种可以更新估计的改进的相干CLEAN算法,以期提高散射系数的估计精度。
1 成像模型
采用面阵三维成像的模式,以步进频信号为例,并采用后向投影成像(back projection,BP)算法来获得目标的三维图像,再利用RCS反演来获得目标的RCS值[19]。步进频信号为
si(t)=u(t)exp(j2πfit),i=1,2,…,N
(1)
式(1)中:fi=f0+iΔf为不同脉冲的频率,其中Δf为步进频率增量;N为频率个数;u(t)为信号包络。
假设成像场景空间中某个点的散射系数为σn,则相应回波为
y(t)=σnsi(t-τ)exp[j2πfi(t-τ)]
(2)
式(2)中:τ=2R/c为回波延时,其中R为距离,c为光速。为方便表示,写成矩阵形式,步进频回波信号的观测矩阵为
(3)
式(3)中:n为场景分辨单元个数;m为阵元个数;N为频率个数;τmn为最后一个阵元与场景最后一个分辨单元的延时。将空间散射系数排成列向量,即
σ=(σ1,σ2,…,σn)T
(4)
则回波用矩阵生成的方式可表示为
y=Φmσ
(5)
BP像为
(6)

(7)
式(7)中:Φm(:,i)为Φm矩阵的第i列。当散射体σi=1时,有
(8)
式(8)中:PSFi为散射体σi对应的点扩展函数,该点在其位置的像可以进一步表示为
mNσi
(9)
考虑其他散射点的干扰时,所有目标在该点位置处的像为
BP(i)=(Φmσ)TΦm(:,i)*=mNσi+
[Φm(σ1,…,σi-1,0,σi+1,…,σn)T]T×
Φm(:,i)*
(10)
从式(10)可看出,成像场景中各个位置的BP像是由相干积累的mNσi和其他目标在该点处的干扰组成。
2 CELAN算法
2.1 CLEAN算法原理
传统成像都是由真实的散射系数卷积上点扩展函数来获得[3],即
BP=σ⊗PSF
(11)
也可以展开来写,即不同的散射系数乘上其对应的点扩展函数再求和,表示为
(12)
CLEAN算法每次寻找的估计值,不仅影响着此次的精度,也影响着其余散射系数的估计精度,只有尽可能地将每次的估计误差变小,才能保证更好地估计其余的散射系数,假设获得了全场景的散射系数估计,则残差为
(13)
CLEAN算法的首次对某个散射系数的估计为
Φm(:,i)*/(mN)
(14)
因此不可避免的每次估计都含有误差,为了消除首次的估计误差,以及随后的累计误差,采用改进的相干CLEAN算法。
2.2 改进的相干CLEAN算法
改进的相干CLEAN算法流程图如图1所示,具体的实施步骤如下:
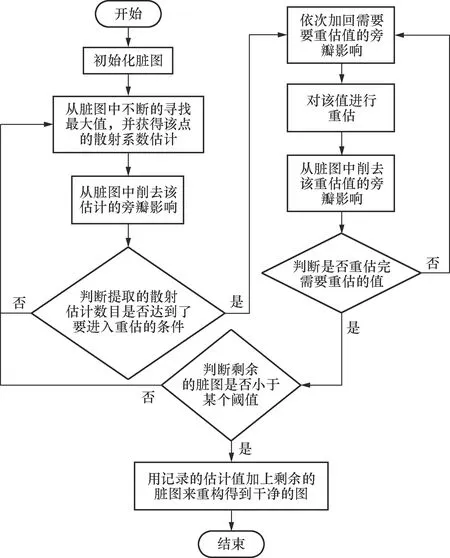
图1 改进的相干CLEAN算法流程图Fig.1 Flow chart of improved coherent CLEAN algorithm
步骤1对初始“脏”图赋值(迭代后为DIRTk,k为迭代次数)。
DIRT0=BP
(15)
步骤2找出图中绝对值最大的点,以及位置。
(maxb,i)=max(|DIRTk|)
(16)
记录下该点的复值,并除以增益m×N作为对第i点散射系数的估计,即
(17)
记录每次寻找的点扩展函数,即
(18)
记录每次寻找的位置:I(k)=i;
记录每次需要减去的点扩展函数影响,即
(19)
步骤3将B(k,:)从“脏”图中减去,即
DIRTk=DIRTk-1-Β(k,:)
(20)
步骤4循环步骤2和步骤3,直到迭代减法后得到的“脏”图达到某-阈值或已经估计的散射点数达到设定的条件时,进入步骤5对这些点的重新估计。
步骤5每次更新,加回曾削去的第j行的B,(j为该循环的迭代次数)。从I中取出需要重估的位置:i=I(j)。
对该点进行重新估计,即
(21)
更新每次减去的点扩展函数影响,即
(22)
减去该影响,即
DIRTj=DIRTj-1-Β(j,:)
(23)
步骤6循环步骤5,直到循环迭代完所有的散射系数后,进入步骤7。
步骤7判断迭代减法后得到的“脏”图是否接近背景噪声或达到某-阈值,满足则终止循环。否则循环步骤2到步骤6,直到满足为止。
步骤8将循环中记录的散射系数乘以积累增益,再加上剩余的脏图即可得到重构的干净图BC,即
(24)
该算法对先前估计的散射系数,进行重新估计,并用重新估计的值,逐个更新其余的值,而整个更新的过程,如同波纹一样浮动的估计。传递到哪,则更新哪个点的值。而首次达到进入更新循环条件的散射点数,需要保证该个数以内寻找的散射点的位置是正确的,这些寻找的位置次序,不要求一定是要按真实的散射系数的绝对值的大小来排。因此整个散射系数的依次更新过程,随着寻找的散射系数位置如同波纹浮动一样的更新。
起始需要更新的散射点数个数过高,可能会造成散射系数位置的错误估计。而其中的原因是,首次选用过多的散射系数估计,作为更新之前估计的依据,造成累计误差的增大,从而提取散射系数的位置可能会出错。
3 实验仿真
3.1 MATLAB仿真
用MATLAB建立理想的6个散射点,其散射系数和相对于场景中心的坐标如表1所示,仿真中频率个数N=100,初始频率f0=1.5 GHZ,步进频率增量为10 MHz,横向阵元和纵向阵元个数都为21个。场景中心与接收阵列相距2 m。
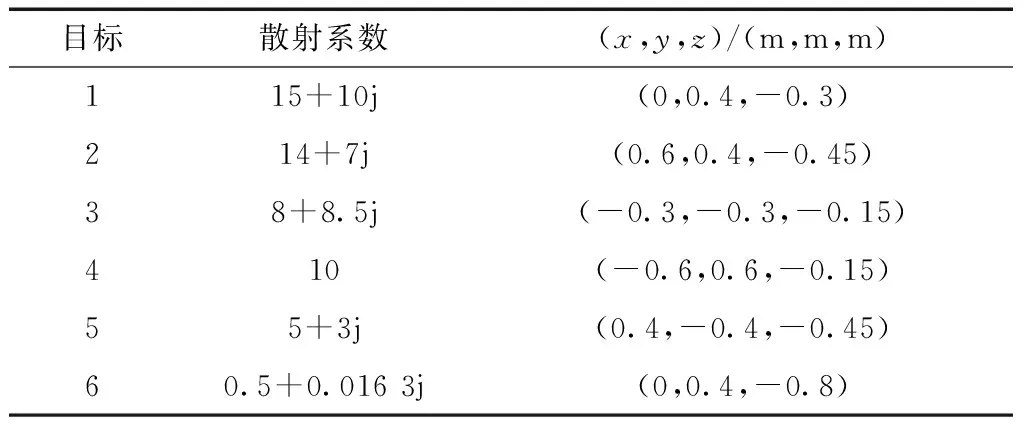
表1 不同目标的位置和散射系数Table 1 Location and scattering coefficient information of different targets
基于阈值法提取的BP像,和改进的相干 CELAN算法处理的图像分别如图2和图3所示。由图3 可看出,由于改进相干CLEAN算法的提取效果,使得小散射点也可以清晰地分辨出来,避免了旁瓣的串扰。由此可以得出CLEAN算法相比于阈值法更能有效地提取散射中心。
为便于直观地比较改进的相干CLEAN算法与原始相干CLEAN算法对每个点的恢复误差,如表2所示。由表2可以看出,由于原始相干CLEAN没有校正各个点的估计,因而散射点的估计误差会大一些,而改进的相干CLEAN算法则纠正了这些误差,从而大大地提升了各个散射点的恢复精度。
3.2 FEKO仿真
当场景目标是复杂情况时,以飞机模型为例,如图4所示,利用FEKO对飞机模型进行求解,来获得其参考RCS值。其仿真参数与MATLAB的仿真相同,BP成像和CLEAN图像分别如图5和图6所示。不同散射中心提取方法反演的RCS,在不同角度和频率上的值分别如图7和图8所示。
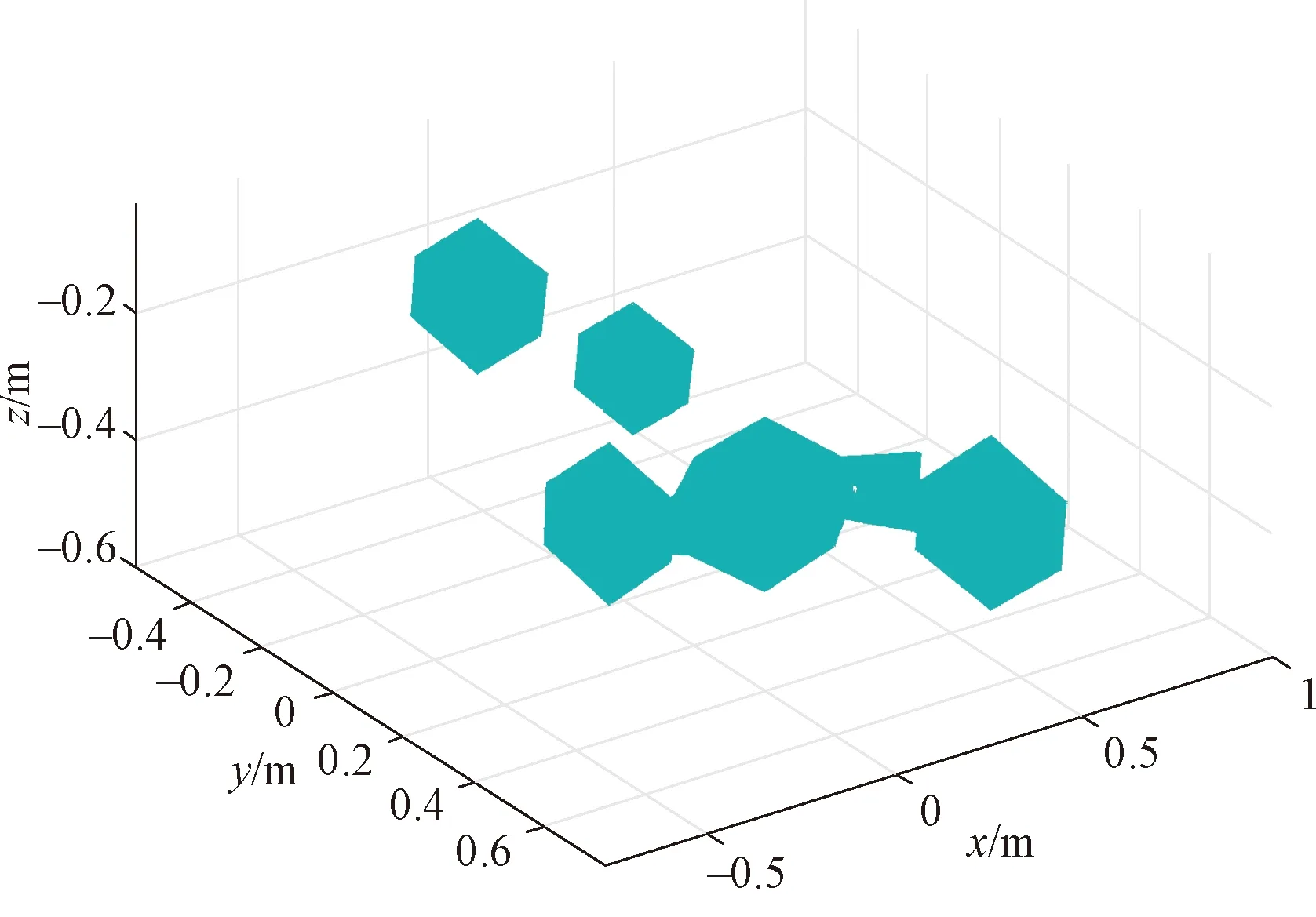
图2 BP图像Fig.2 BP image
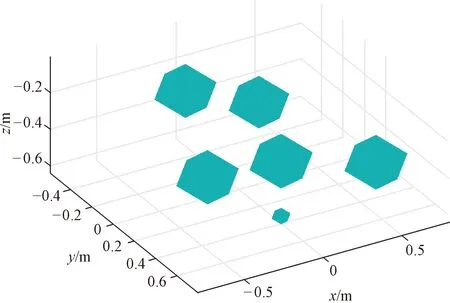
图3 改进相干CLEAN图像Fig.3 Improved coherent CLEAN image
从图7和图8可以看出,因为旁瓣的串扰造成了RCS反演存在误差。改进的相干CLEAN算法处理后,反演的RCS更加接近参考值。为便于比较,不同算法对RCS的反演误差如表3所示。由于原始相干CLEAN没有矫正各个散射点的估计,因此当目标散射点个数多时,提取存在误差。
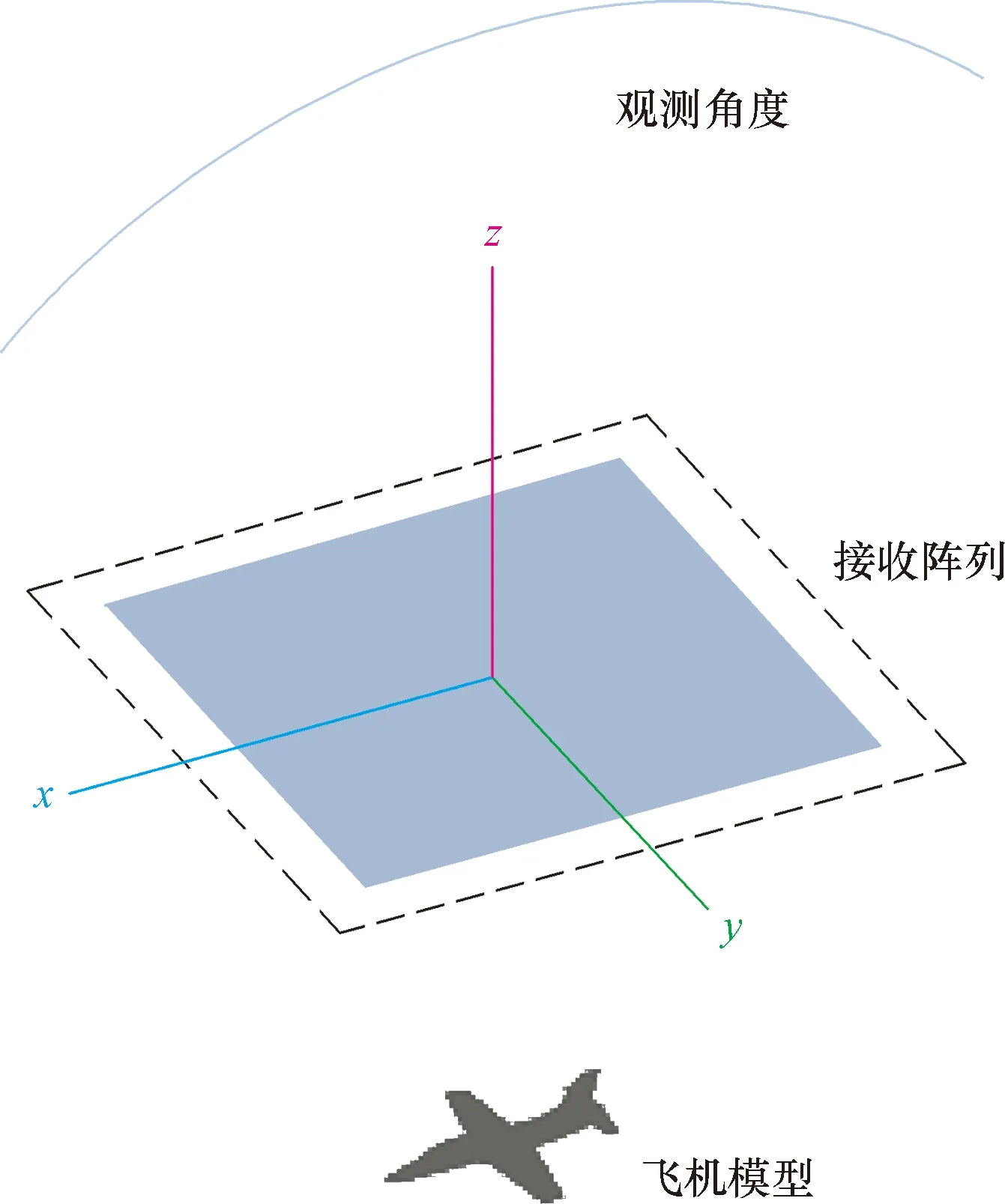
图4 飞机模型Fig.4 Aircraft model
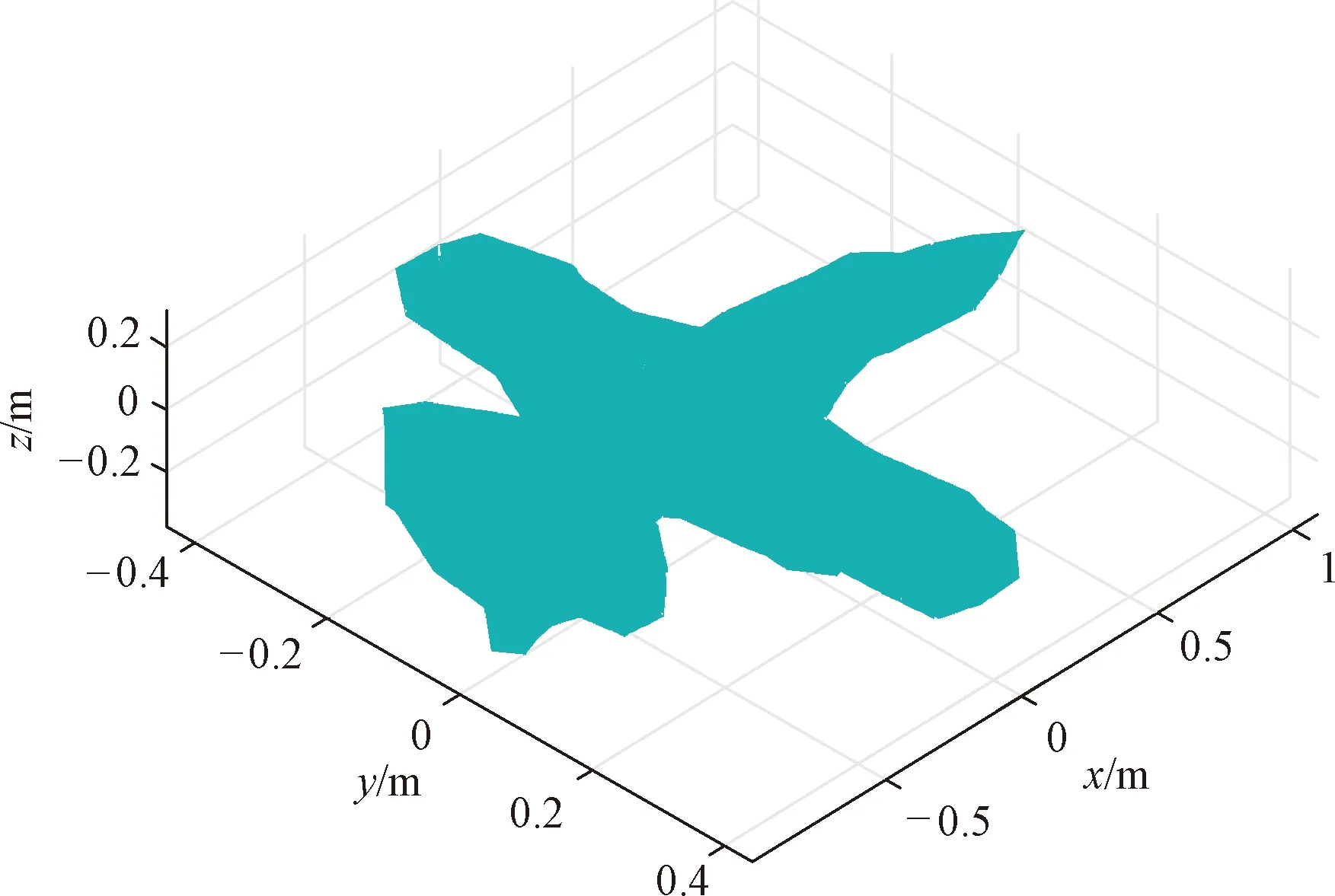
图5 飞机BP图像Fig.5 Aircraft BP image

表2 不同算法对各个散射系数的恢复误差
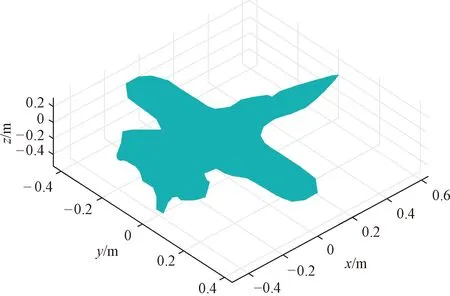
图6 飞机CLEAN图像Fig.6 Aircraft clean image
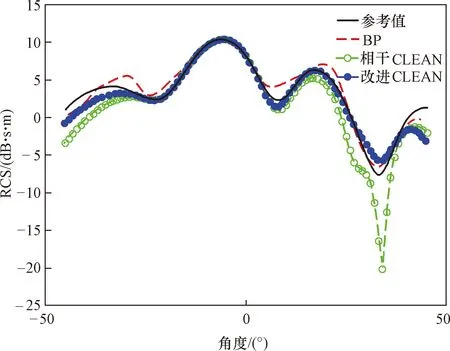
图7 不同角度的RCSFig.7 RCS at different angles

图8 不同频率的RCSFig.8 RCS values at different frequencies
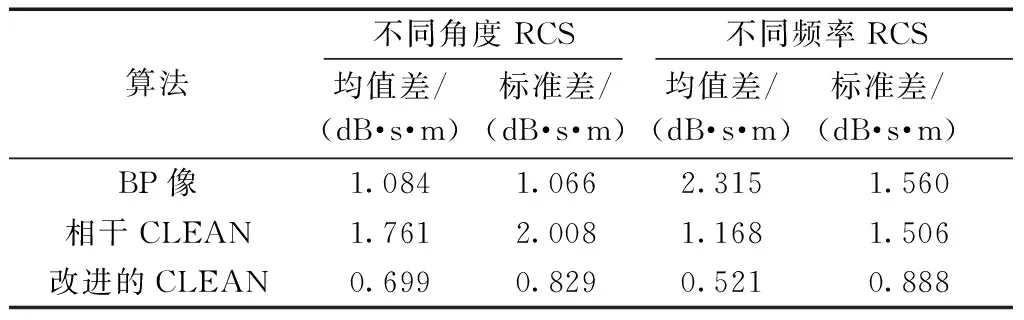
表3 不同算法对RCS反演的误差Table 3 Error of different algorithms for RCS inversion
4 结论
三维成像的RCS测量技术中散射中心的提取至关重要,它影响着RCS的反演精度。由于采用近场测量模型,先成像再反演RCS值,因此测量场景小,可以求出该模型下完整的点扩展函数。因此,采用了步进频BP成像精确完整的点扩展函数来消除卷积,从而提高散射提取的精度。另外在图像重构中,采用了对成像场景中每个网格点进行恢复的方法,在此基础下得到以下结论。
(1)由于BP成像存在旁瓣,因此采用阈值法提取的散射中心有误差,用其反演获得的RCS值与参考值存在偏差。
(2)采用CLEAN算法可以有效地抑制图像中的旁瓣,但是CLEAN算法的每次估计都不可避免的含有误差,当场景变得复杂时,累计误差增大。
(3)采用改进的相干CLEAN算法,更新校正每个点的估计后,可以进一步有效地提取散射中心,从而能够更好地反演获得目标的RCS。
猜你喜欢
物理学报(2022年22期)2022-12-05
中等数学(2022年5期)2022-08-29
舰船科学技术(2022年11期)2022-07-15
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
延安大学学报(自然科学版)(2021年2期)2021-06-18
中等数学(2020年2期)2020-08-24
海军航空大学学报(2020年2期)2020-07-27
无线电工程(2020年8期)2020-07-25
制导与引信(2020年3期)2020-03-17