
矿井提升机双馈变频调速的模糊逻辑控制方法
2021-06-04 09:12谢子殿赵仕艳金洪德孟繁雯亢健铭
黑龙江科技大学学报 2021年3期
谢子殿,赵仕艳,金洪德,孟繁雯,亢健铭
(黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022)
0 引 言
在现代工业生产中,总电能的很大一部分通过电动机转换成机械能,电机在工业生产中占着举足轻重的地位。在诸多不同类型的电机中,双馈感应电机成本低、结构简单、性能良好、可靠性高和易维护,已在风机、水泵、矿业等领域得到了广泛应用[1-3]。矿井提升机是矿山开采和生产过程中的主要设备,安全、高效的运行关系着煤矿的经济效益.在提升机实际应用中,由于电机本身结构系统的复杂性,调速控制系统难以达到预期效果,而直接转矩控制精度高,动态响应迅速,稳定性高,以及其复杂性低于其它控制方式,如省掉了矢量控制复杂的变换与计算,实现对转矩的直接控制,满足矿井提升机双馈调速系统中电机的运行要求。但传统直接转矩控制具有电机转矩和磁链脉动大及定转子电流谐波失真含量大的缺点[4-5],使电机带来如机械抖动、老化与过热等,另外传统直接转矩调速系统能量回馈时造成电网污染,因此矿井提升机调速系统需采用先进的控制算法实时控制电机的转矩和磁链,H.Sudheer等[6-7]将模糊逻辑控制算法应用在直接转矩控制系统中,该算法能有效的抑制磁链和转矩脉动,及降低定转子电流谐波含量,改善了传统直接转矩带来的这些缺点。
1 双馈调速系统原理
在提升机的运转过程包括加速、匀速、减速、爬行四个阶段,其中提升机高速稳速运行是主要的运行阶段。矿井提升机双馈调速系统,见图1,电机侧变流器采用模糊逻辑直接转矩控制方式控制电机转速,网侧变流器为直流侧提供稳定电压,在此仅研究电机侧变流器的控制策略。

图1 提升机双馈调速系统Fig. 1 Doubly-fed system of mine hoist
提升机双馈调速系统的原理是将提升机定子绕组与工频电网相连接,而转子绕组接入能够控制输出电压频率、相位、幅值并能够控制电机实现四象限运行的变频器。提升机的转子侧电流及转子侧外加电压为
(1)
(2)

s——转差率;

Rr——转子相电阻;
Xr——转子相漏电抗;

将式(2)代入式(1),经简化计算得转子有功和无功电流为
(3)
(4)
式中:Zr——转子漏阻抗幅值;
φr——转子电路阻抗角;
Irp——转子有功电流;
Irq——转子无功电流。

2 直接转矩调速原理
传统直接转矩控制原理是直接生成开关向量表,模糊直接转矩控制是将开关向量表由模糊逻辑块代替。
2.1 传统DTC调速
传统直接转矩采用查表法,逆变器产生八种电压矢量,由电磁转矩、转子磁链和转子磁链角三个因素共同决定,从中选取合适的电压矢量,在传统直接转矩调速系统中,由电磁转矩和转子磁链与给定值偏差及转子磁链空间位置共同决定选取合适的电压矢量,生成开关向量,如表1所示。

表1 传统转矩开关向量
传统直接转矩系统结构如图2所示,转矩滞环将转矩脉动限制在一个较小的范围内,磁链滞环维持磁链的幅值恒定。开关表模块接收转矩和磁链的增减信号和磁链的角度信息,采用查表法选取转子侧逆变器驱动脉冲,产生需要的转矩和磁链,另外,转矩给定值是转速误差经PI调节器处理所得。

图2 传统直接转矩控制系统Fig. 2 System of conventional DTC
2.2 模糊DTC调速
由于脉动和谐波含量将会给电机带来机械故障,如机械抖动、电机老化和过热等一系列问题,不仅给整个调速系统带来很大的危害,造成能源的浪费,而且降低了电机寿命。为了改善电机转矩和磁链脉动及定转子电流谐波含量,采用模糊逻辑控制方法将滞环调节器和开关向量表由模糊逻辑块代替[8-10],该方法能有效地解决这些问题,控制系统如图3所示。
模糊控制器基本组成原理见图4,输入和输出模块分别代表量化因子模块和比例因子模块,“知识库”框内的几个模块依次代表隶属函数库、控制规则库和清晰化方法库。另外,“模糊控制器核心”框内的几个模块依次代表模糊化运算、推理运算和清晰化运算。

图3 模糊逻辑直接转矩控制系统Fig. 3 System of fuzzy logic DTC

图4 模糊控制器原理Fig. 4 Principle of fuzzy controller
对双馈电机调速系统模糊逻辑控制器的展开设计,需分别对控制器的三个输入模糊化处理,及对控制器的输出解模糊,通过建立模糊规则,并采用合理的模糊推理和决策产生逆变器驱动脉冲。
模糊化过程目的是通过为每个输入变量定义隶属函数,将确定性输入变量转换为语言变量,转矩误差的隶属函数图5所示。
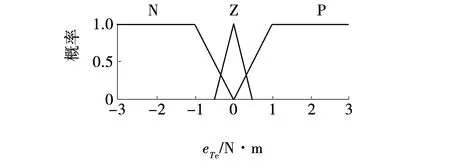
图5 输入转矩误差的隶属函数分布Fig. 5 Membership function of torque error
转矩误差变量论域由三个模糊集组成,隶属函数可以表示为
(5)
(6)
(7)
式中:eTe——转矩误差;
N(eTe)、Z(eTe)、P(eTe)——转矩的三个模糊集合。
图6为输入变量转子磁链误差。

图6 输入转子磁链误差的隶属函数分布Fig. 6 Membership function of rotor flux error
输入变量转子磁链误差的隶属函数的论域由三个模糊集和组成,其隶属函数可以表示为
(8)
(9)
(10)
式中:eψr——磁链误差;
N(eψr)、Z(eψr)、P(eψr)——磁链的三个模糊集合。
跨度为60°,输入变量转子磁链角的隶属函数如图7所示。论域由六个模糊集和组成,隶属函数的类型采用三角形。

图7 输入转子磁链角的隶属函数分布Fig. 7 Membership function of rotor flux angle
清晰化过程的目的就是将由推理机制建立的模糊信息转化为物理量或数值量,即在模糊集合的论域中找一个清晰值来代表它。输出变量由三个子输出组成(Sa、Sb、Sc),表示转子侧逆变器的三个开关量,该输出变量的隶属函数如图8所示,每个子输出被分成两个模糊集合(0和1)。

图8 输出开关变量隶属函数分布 Fig. 8 Membership function of output of switching variable
为了能将模糊控制成功的应用到调速系统,需对模糊规则设计,总共有54条规则(表2),控制规则格式可表示为:If (eTeisX) and (eψrisY) and(θxisZ) then(nisNi)。

表2 模糊规则控制器
采用曼达尼型模糊推理的最大—最小合成法,第i条规则的作用强度为
αi=min(μXi(eTe),μYi(eψr),μZi(θx)),
(11)
式中:αi——第i条规则控制强度,i=1,2,…,54;
μXi、μYi、μZi——模糊变量转矩误差、转子磁链误差和转子磁链角的隶属函数。
通过曼达尼型的取小算子模糊推理运算,可得第i条规则对应的控制决策为
(12)
式中,μNi——输出变量n的隶属函数。
经聚类分析,输出量n的最终隶属函数方程为
(13)
此处的输出仍然是一模糊集,需解模糊化,最终变成开关量n,即输出变量三个子输出组成(Sa、Sb、Sc)。
3 系统仿真设计与分析
3.1 仿真设计
系统仿真主要包含三个部分:主电路仿真设计、计算模块仿真设计和模糊模块仿真设计。电机采用三相绕线式异步电机,模糊模块采用Matlab/Simulink中的模糊控制器,以转矩、磁链和磁链角作为输入信号,其输出信号为开关量信号,其中转矩和磁链信号经过滞环比较控制器输入到模糊模块控制器,输出开关信号经逻辑传输到逆变器。模糊逻辑规则编辑器见图9所示,通过规则编辑器控制模糊控制器的输出信号,由表2可知,规则编辑器总共54条规则。

图9 模糊规则编辑器Fig. 9 Fuzzy rule editor
矿井提升机调速系统及模糊模块仿真见图10,其模糊直接转矩方式由模糊控制器实现,该控制器三个输入信号和三个输出信号,模糊控制器的输出信号输入到逻辑传送模块形成6路开关信号。

图10 调速系统仿真Fig. 10 Speed control system simulation
3.2 仿真结果
搭建双馈感应电机传统直接转矩控制和模糊逻辑直接转矩控制系统的仿真模型,设计网侧直流电源为Udc=600 V,电动机的类型选用双馈绕线式感应电机,电机主要参数:额定功率630 kW,定子相电压380 V,定转子漏感0.5 mH,定转子电阻0.02 Ω,互感0.3 mH,极对数2,转动惯量20 kg·m2。矿井提升机双馈变频调速系统仿真条件:0 s时初始给定转速n*=1 300 r/min,6 s时给定转速跃变到200 r/min,两种控制策略仿真条件下转子磁链轨迹和电磁转矩见图11和12,模糊逻辑控制器下电机磁链轨迹更为圆滑且减速阶段转矩脉动小。
电机定子电流局部放大及傅里叶分析结果见图13、14、200 r/min稳速阶段时,5个周期定子a相电流的傅里叶分析,传统DTC和模糊DTC两种控制方式下定子a相电流的主要频率都为50 Hz,但谐波含量分别为5.12%和2.31%,模糊DTC控制方式下谐波含量降低50%以上。对10个周期转子a相电流(图15)进行傅里叶分析,转子a相电流两种控制方式下谐波含量η分别为11.04%和5.34%,模糊DTC控制方式下谐波含量降低50%以上。
两种控制方式下电机转速波形见图16,在模糊控制器下保持了传统DTC调速系统转速的鲁棒性。电机能稳定运行在加速、稳速、减速和爬行运行阶段,满足提升机运行要求,对在Matlab/Simulink仿真平台下的两种控制策略仿真结果进行分析,仿真分析结果如表3所示。

图11 转子磁链轨迹Fig. 11 Rotor’s trajectory

图12 电磁转矩Fig. 12 Electromagnetic torque

图13 DTC下定子电流Fig. 13 Stator’s current for DTC

图14 DTC下定子电流傅里叶分析Fig. 14 Fourier analysis of DTC stator carrent
感应电机这四种性能参数得到明显的改善,转子磁链φr和电磁转矩Te脉动分别降低了60.00%、25.93%,定转子电流THD分别降低了54.88%、51.63%,电机转速响应时间提高了0.041 s,感应电机到达给定转速的时间几乎不变,保持了传统直接转矩控制响应速度快和良好鲁棒性,且转速无脉动。

图15 转子电流Fig. 15 Rotor’s current

图16 电机转速Fig. 16 Motor’s speed

表3 传统与模糊逻辑DTC参数对比
4 结 论
采用模糊逻辑直接转矩控制,电机转子磁链和电磁转矩波动明显降低,减少了电机发热、机械振动、老化等问题,提高了能源利用率;电机定子和转子电流的谐波含量降低,均降低50%以上,减少了当电能回馈电网时对电网的污染;电机响应转速加快、调节时间小、准确无超调,保持了传统DTC调速系统的优点。
猜你喜欢
世界有色金属(2022年14期)2022-10-21
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
电子乐园·上旬刊(2022年5期)2022-04-09
网络空间安全(2019年8期)2019-03-18
电机与控制学报(2018年9期)2018-05-14
中国高新技术企业(2015年13期)2015-04-30
