端部参数激励下水中悬浮隧道锚索振动响应分析
2021-06-15 18:25王金龙巫志文
西部交通科技 2021年3期
王金龙 巫志文

作者简介:
王金龙(1988—),工程师,从事桥梁隧道施工管理工作;
巫志文(1984—),博士,讲师,从事海洋桥梁隧道工程研究工作。
文章通过建立参数激励系统理论模型进行理论分析和数值仿真计算,研究了端部参数激励下水中悬浮隧道锚索的振动响应,并对不同阻尼比、垂度、锚索长度、水流速度、倾斜角度、管体重浮比等关键敏感性参数对锚索的振动响应影响作用进行分析,主要得到以下结论:在相同锚索长度、垂度的情况下,阻尼比越小,锚索中跨位移均方根值越大;随着锚索长度、垂度的增加,锚索中跨位移均方根值也越来越大;随着水流速度的不断增加,锚索中跨位移均方根值呈现出先增大后减小,并最终趋于平稳的状态;随着倾斜角度的不断增加,锚索中跨位移也随之不断增加,这表明选择合适的倾斜角度对于控制结构的振动响应也很重要;在实际锚泊系统设计时,可以通过增加预张力的方式来控制锚索的运动响应,但增加预张力会导致锚索固有频率的改变,使结构共振频率比增加,导致其疲劳屈服损伤加深。
悬浮隧道;锚索;参数激励振动
U459A351195
0 引言
随着现代科技与社会的发展,生产和生活水平的提高,人们越来越渴望更加高效、便捷的交通方式,正是这样的需求促进着悬浮隧道等新型交通设施的提出和研究。
水中悬浮隧道,学名Submerged floating tunnel(SFT),是依据阿基米德原理(hydrostatic thrust)采用静压推力构思出来的新颖的交通结构[1],以隧道的形式穿越大型深水域,因此更广泛使用的名字是阿基米德桥。它的主体是满足公路及铁道交通要求的管状结构,由海床上的锚固系统或水上浮箱等方式加以固定,悬浮在水中一定深度,与两岸的建筑结构相连接,受自身重力、水体浮力和支撑结构的锚固力来稳定在构筑位置上。
根据目前的研究设计,悬浮隧道最有可能采取的是墩柱式、锚固式这两种支撑体系。关于这两种体系的相关分析,学者[2-5]在结合了波浪、海流、地震等因素以及其他环境作用下,研究了它们的稳定性和相应的承载力。比较重要的因素是环境动荷载作用,因此国内外专家学者在这方面的研究也更为广泛。
P.Fogazzi和F.Perotti[6]尝试建立墨西拿海峡水中悬浮隧道的有限元模型,由于存在变化的轴力作用,需要研究锚索单元的横向振动,并将实际应用中的锚固系统模型化,视为两个杆件面积和柔度都相等的5个自由度的平面铰接杆单元。为了得到该单元刚度矩阵还需要一些其他假设:可忽略转动及横向位移;轴向变形足够小,并且不沿杆长改变,是关于节点位移的一个二次函数;材料是弹性的。为了完善模型,在杆件单元底部的数值和水平方向分别设了两个弹簧和两个平行于弹簧的线性阻尼。虽然其地震激励下的动力响应分析结果不足以配合工程要求,但仍非常具有参考意义。
麦继婷等[7]采取了另一种简化方式,为计算参数激励频率对张力腿一阶涡激动力响应的影响,将张力腿简化为竖向简支梁有如下假设:张力沿锚杆方向的变化很小;将参数激励项的频率视为与车辆响应频率相同;以流向为x轴正方向。在此假设下应用涡激振动方程,考虑非线性流体阻尼、参数激励,结合伽辽金法、数值积分法,可以达到计算目的。
秦银刚[8]等最先使用Lyapunov函数计算参数激励下张力腿稳定性,包括振动阶次、张力腿轴向刚度、参数激励频率、张力腿长度、初始张力大小、动张力系数对张力腿稳定性的影响。
悬浮隧道的振动参数问题一直是可行性研究的重点。悬浮隧道竖向的稳定主要是靠自身的重力和锚索的拉力来平衡其浮力,而其水平方向的平衡则主要是靠斜拉锚索的拉力来平衡其所受到的波浪力和水流力,因此,锚索的稳定问题也就显得越来越重要了[9]。由此,研究悬浮隧道锚索在涡激振动下的稳定性,具有一定的工程应用价值。
本文详细研究了端部参数激励下水中悬浮隧道锚索振动分析,通过理论分析和数值仿真计算,对不同阻尼比、垂度、锚索长度、水流速度、倾斜角度、管体重浮比等关键敏感性参数对结构的振动响应影响作用进行深入研究。
1 理论基础
1.1 建立参数激励系统理论模型
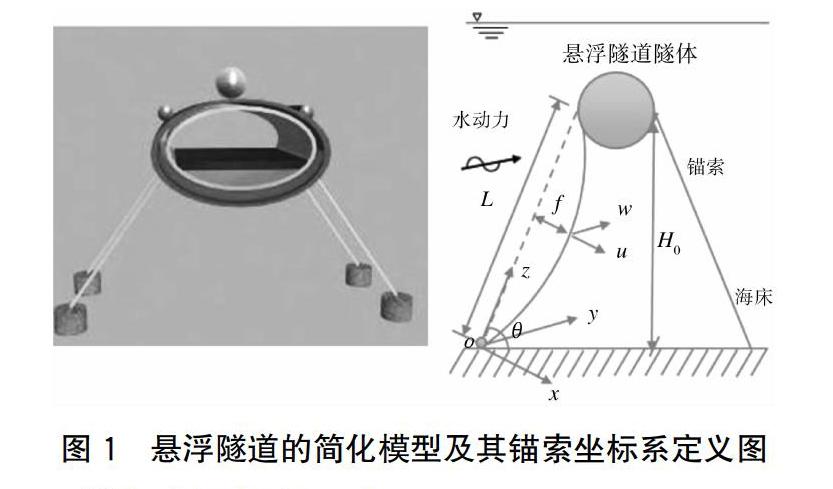
根据实际锚索设计,建立如图1所示的坐标系。
锚索端部激励方程:
Z=ZccosωTt(1)
式中:Zc——幅值;
ωT——频率。
此外有以下假设:不考虑锚索的抗弯刚度;考虑水体附加惯性力以及水体阻尼力;考虑垂度。
关于垂度的讨论:锚索的跨中垂度f应小于锚索的无应力长度L的1/8。假设锚索在初始状态处于抛物线型,则有[10]:
x=4fzL1-zL(2)
式中:LE——静力状态下锚索长度;
θ——倾角;
E——弹性模量;
A——横截面积;
m——无应力状态下单位长度质量。其中:
LE=L1+8f/L2
(3)
設静力状态下锚索的张力为:
T0=T0(s)(4)
式中:s——弧长坐标;
u——沿锚索轴向的法线方向由静力平衡位置开始的位移,可以用来表示动荷载下的动力构型。
由相关原理可以得到最终的锚索振动方程:
m2ut2+Csut-ΔH2xz2-H0+ΔH2uz2=FD
(5)
ΔH=EALEZccosωTt+8fL2L0udz+12L0uz2dz
(6)
f=γfVsL2cosθ8T0(7)
式中:Cs——锚索黏性阻尼系数;
FD——锚索振动引起的水体对其的作用力;
H0——沿z向的锚索初张力。假设垂度很小,有T0≈H0,且ds≈dz;
ΔH——振动引起的附加锚索张力;
f——锚索跨中垂度;
γf——锚索浮容重;
Vs——锚索单位长度的体积。
考虑水体的附加惯性力和阻尼力时,由于锚索直径与入射波的波长相比尺度非常小,计算水体的作用力时可以应用Morison方程。用附加惯性力和水体阻尼力之和来表示锚索横向振动产生的水体对单位长度的作用力:
FD=-πD24ρWCmü-12ρWDCD||(8)
式中:ρW——水的密度;
D——锚索外直径;
CD——拖拽力系数,取CD=0.7;
Cm——附加质量系数,取Cm=1。
考虑到锚索的垂跨比很小,可以近似地取标准线的振动模态:
uz,t=∑Nn=1untsinnπzL
(9)
将式代入,采用伽辽金法化简,可得:
L0Rz,tsinjπzLdz=0 j=1,2,…,∞(10)
式中:R(z,t)——留函数。
Tagata由实验指出,对于张紧的弦,在其端部激励振动中占主要部分的是基本模态,因此可将下式作为一阶振动模态的化简式:
ü+2ωsξs+ω2s+EAπ2mL2LEZccosωTtu+24fEAπmL3LEu2+ EAπ44
mL3LEu3+32fEAmL2LEπZccosωTt+2DnL·m=0(11)
其中:
Dn=12ρWDCDL0sinπzL2sgnsinπzLsinπzLdzm=m+πD24ρWCm,为单位长度质量与附加质量之和;
ω2s=T0mπL2+512f2EAmL3LEπ2
,ωs为一阶固有频率;Cs=2mωsξs,ξs为阻尼比。
若不考虑垂度的影响,也可以得到不含垂度的振动方程:
ü+2ωsξs+ω2s+EAπ2mL3ZccosωTtu+EAπ44mL4u3+2DnL·m=0(12)
若将式(11)与式(12)做比较可以发现,不考虑垂度则振动方程中少了u2项和32fEAmL2LEπZccosωTt项。u2项是为了使锚索振动偏离平衡位置,32fEAmL2LEπZccosωTt项表示端部激励在振动方程中即充当参数激励的作用,也充当外部振动荷载。
若对比锚索在空气中的振动方程,可得:
ü+2ωsξs+ω2s+EAπ2mL2LEZccosωTtu+24fEAπmL3LEu2+EAπ4mL3LEu3+32fEAmL2LEπZccosωTt=0(13)
这个方程可以看作是关于锚索自身质量的部分,另一部分是水中的附加质量,此外锚索还受阻尼力作用。计算锚索跨中垂度需要利用浮容重,因此若其他条件不变,水中的垂度会小于空气。
1.2 方程数值解的求解
为求非线性常微分方程的数值解,考虑采用Matlab中的ode45函数。ode45函数采用的方法是4阶RungeKutta算法,用5阶公式做误差估计来调节步长,是一种自适应步长(variablestep变步长)的常微分方程数值解法,也是求非刚性常微分方程数值解的首选方法。RungeKutta法是一种高精度单步算法,易于改变步长,比较稳定,在工程上应用广泛,但计算量较大。四阶RungeKutta法精度更高,也是最为常用的一种。
由于误差累计,Matlab中的ode45是经过改造的,其基础是经典的4阶RungeKutta公式[11],见式(14):
k1=fxi,yi
k2=fxi+12,yi+h2k1
k3=fxi+12,yi+h2k2
k4=fxi+1,yi+hk3
yi+1=yi+h6k1+2k2+2k3+k4
(14)
求解高階常微分方程时,不能直接应用ode45求解,需先将方程化为一阶常微分方程组。对于式(13),用两个新的变量来代换u和,才可以达到这一目的。为了方便表示清晰,先将方程简化为式(15):
ü+A+Btu2+Cu2+Du3+Et=0(15)
再分别设u1=u,u2=,可将原二阶常微分方程转化为如下一阶常微分方程组,见式(16):
1=u2
2=-Au2+Btu21+Cu21+Du31+Et
(16)
式(16)即成为可以由ode45求解的形式。
2 数值分析与结果
锚索端部参数激励振动方程的计算主要通过Matlab编程实现,采用四阶Runge-Kutta法计算式(13)的数值解。基本参数的确定是根据国外悬浮隧道设计方案中的参数来选取适当范围,并设定相应的参数。取标准参数如表1所示。
2.1 特定参数的变化对振动的影响
本章节通过理论分析和数值仿真计算,对不同阻尼比、垂度、锚索长度、水流速度、倾斜角度、管体重浮比等关键敏感性参数对结构的动力响应影响作用进行深入研究。
2.1.1 阻尼比、垂度及锚索长度的影响
根据国外设计方案中的拟建数值,阻尼比取值为0.001 6。在阻尼比参数的一系列对比中,选取的变化范围是0.001 0~0.002 2。
如图2所示,在三种不同的阻尼比的情况下,均表现出当锚索长度<180 m时,锚索中跨位移均方根值保持在一个较稳定的值,当长度超过180 m,锚索中跨位移均方根值出现陡增式的增长。另一方面,比较不同的阻尼比可以发现,在相同的锚索长度下,阻尼比越大,锚索中跨位移均方根值越小。
随着锚索长度地不断增大,锚索中跨位移均方根值也在不断增大,这说明锚索的长度对结构的稳定性有着重要的影响,长度超过一定限度范围,将降低结构的稳定性,并且这种对稳定性的破坏呈现出指数型的增长。另一方面,随着锚索阻尼比的增大,锚索中跨位移不断减少,说明阻尼比对结构稳定性有着一定影响,并且阻尼比越大,結构越稳定。
如图3所示,在三种不同阻尼比的情况下,随着锚索垂度的增加,锚索中跨位移均方根值也在不断地增大。另一方面,比较不同的阻尼比可以发现,在垂度相同的情况下,阻尼比越大,锚索中跨位移均方根值越小。
因此在实际工程应用中,可以通过合理设计及选取悬浮隧道锚索材料、调节适当的锚索长度、垂度关键参数,在锚索及隧体安装阻尼器等方式增加结构的阻尼比,从而提高悬浮隧道锚泊系统整体的稳定性和安全性。
2.1.2 倾斜角度的影响
如图4的计算结果所示,随着水流速度的增大,锚索中跨位移也有着较大的波动。当水流速度达到约2 m/s时,锚索动力响应最强烈,锚索中跨位移达到最大值。当水流速度继续增大时,锚索中跨位移则迅速减小直至稳定状态。另外,随着倾斜角度的不断增加,锚索中跨位移也随之不断增加,这表明选择合适的倾斜角度对于控制结构的动力响应也很重要。
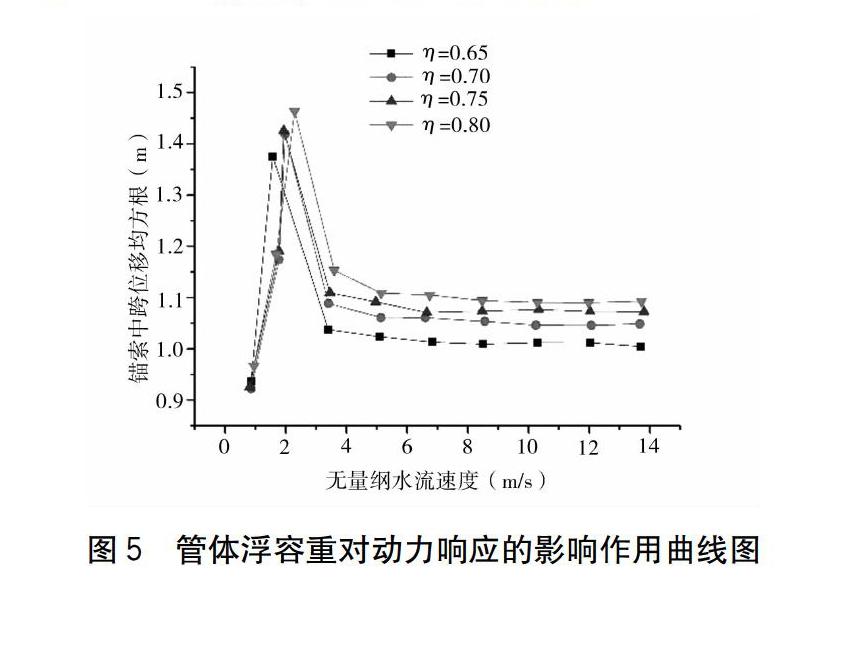
2.1.3 管体重浮比的影响
管体重浮比是悬浮隧道设计中一个很重要的设计参数,因此有必要对其进行相应的研究。如图5所示,随着水流速度的增大,锚索中跨位移均方根值表现出先不断增大,后逐渐减小并最终趋于平稳的趋势。大约在水流速度为2 m/s时,锚索中跨位移达到最大值。另一方面,在相同水流速度的条件下,随着重浮比的增加,锚索中跨位移均方根值也随之不断减小,这说明重浮比也会显著影响控制结构的动力响应。
2.1.4 预张力和频率比的影响
如图6所示,在三种不同预张力下,锚索中跨位移均方根值都是先增加后减小,并且随着预张力的增大,峰值处的ωs/ω1值也在变大。对比图6和图7可以发现,当ωs/ω1=1时,三种预张力下其峰值大小相差不大,但当ωs/ω1=2,预张力为T0时,其峰值明显比预张力为1.4T0和1.8T0时的值要增大很多。
由此可见,在实际锚泊系统设计时,可以通过增加预张力的方式来控制锚索的动力响应,但是务必注意的是,增加预张力会导致锚索固有频率的改变,使结构共振频率比增加,但是会导致其疲劳屈服损伤加深。因而,工程设计应同时考虑结构运动响应及屈服强度,利用结构优化控制策略来确定合理的预张力。
3 结语
文章详细研究了水中悬浮隧道锚索端部参数振动,通过理论分析和数值仿真计算,对不同阻尼比、垂度、锚索长度、水流速度、倾斜角度、管体重浮比等关键敏感性参数对结构的动力响应影响作用进行深入研究,主要得到以下结论:
(1)在相同锚索长度、垂度的情况下,阻尼比越小,锚索中跨位移均方根值越大;随着锚索长度、垂度的增加,锚索中跨位移均方根值也越来越大。
(2)随着水流速度的不断增加,锚索中跨位移均方根值呈现出先增大后减小,并最终趋于平稳的状态。
(3)随着倾斜角度的不断增加,锚索中跨位移也随之不断增加,这表明选择合适的倾斜角度对于控制结构的动力响应也很重要。
(4)在实际锚泊系统设计时,可以通过增加预张力的方式来控制锚索的动力响应,但是务必注意的是,增加预张力会导致锚索固有频率的改变,使结构共振频率比增加,但是会导致其疲劳屈服损伤加深。
[1]苏志彬,孙胜男.参数激励下水下悬浮隧道锚索的稳定性研究[J].中南大学学报,2013,44(6):2 549-2 553.
[2]董满生,赵佳佳,牛忠荣,等.随机地震激励作用下水中悬浮隧道锚索的动力响应[J].合肥工业大学学报(自然科学版),2013,36(1):74-78.
[3]DONG M,MIAO G,YONG L,et al.Effect of escape device for Submerged Floating Tunnel(SFT)on hydrodynamic loads applied to SFT[J].Journal of Hydrodynamics,Ser. B,2012,24(4):609-616.
[4]Luca Martinelli, Gianluca Barbella, Anna Feriani. A numerical procedure for simulating the multi-support seismic response of submerged floating tunnels anchored by cables[J].Engineering Structures,2011(33):2 850-2 860.
[5]田雪飞,董满生,逄焕平.海洋内波和洋流联合作用下水中悬浮隧道的动力响应[J].应用数学和力学,2014,1(35):71-79.
[6]Di Pilato M, Perotti F,Fogazzi P. 3D dynamic response of submerged floating tunnels under
seismic and hydrodynamic excitation[J]. Engineering structures,2008,30(1):268-281.
[7]麦继婷,杨显成,关宝树.悬浮隧道和支撑结构的响应分析[J].铁道工程学报,2009(7):67-71.
[8]秦银刚,周晓军.张力腿型悬浮隧道涡激响应影响因素分析[J].铁道工程学报,2009(1):77-81.
[9]陈健云,王变革,孙胜男.水流作用下悬浮隧道锚索的动力响应[J].工程力学,2007,24(10):229-234.
[10]孙胜男,苏志彬,白卫峰.轴向激励下悬浮隧道锚索参数振动分析[J].工程力学,2011,6(28):170-174.
[11]赵佳佳.地震作用下悬浮隧道的动力响应研究[D].合肥:合肥工业大学,2013.
猜你喜欢
学苑创造·A版(2021年11期)2021-12-10
西安科技大学学报(社会科学版)(2021年4期)2021-08-27
书香两岸(2020年3期)2020-06-29
作文周刊·小学四年级版(2019年16期)2019-06-12
作文大王·低年级(2017年11期)2017-12-05
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
学苑创造·A版(2017年1期)2017-01-19
数学大王·低年级(2016年3期)2016-03-11
科技与企业(2015年19期)2015-10-21
科技与企业(2015年20期)2015-10-21