变速椭圆齿轮泵的非线性振动模型与拍击特性
2021-06-30 00:40刘大伟谭万鑫任廷志
农业工程学报 2021年7期
刘大伟,谭万鑫,金 昕,任廷志
变速椭圆齿轮泵的非线性振动模型与拍击特性
刘大伟1,谭万鑫1,金 昕2,任廷志2
(1. 燕山大学机械工程学院,秦皇岛 066004;2. 燕山大学国家冷轧板带装备及工艺工程技术研究中心,秦皇岛 066004)
变速椭圆齿轮泵是一种具有大排量、低脉动的新型容积泵,为提升其在高转速下的动力学性能,降低振动和噪声,对该齿轮泵在周期负载作用下的拍击振动行为进行研究。阐明了基于外部非圆齿轮变速驱动的椭圆齿轮泵流量脉动平抑原理,给出了变速椭圆齿轮泵中两级非圆齿轮机构的传动比函数;基于集中参数法,考虑轮齿间的弹性变形、静态传递误差、齿侧间隙及周期负载等因素,构建了变速椭圆齿轮泵的非线性拍击动力学模型,运用龙格-库塔法求解系统的动态响应,定量分析了变速椭圆齿轮泵的拍击特性以及关键参数对拍击门槛转速的影响。结果表明:随着变速椭圆齿轮泵输入转速的增加,系统先后经历无拍击、单边拍击和双边拍击状态,在设计参数下系统的拍击门槛转速为985 r/min,当拍击发生后齿间动态啮合力均方根会迅速增大;提高泵口压强或系统制造精度能够提升拍击门槛转速,泵口压强由0增至3.5 MPa,系统的拍击门槛转速由118 r/min增至1 637 r/min,从动椭圆转子静态传递误差幅值由7´10-2mm降低至1´10-2mm,拍击门槛转速由441 r/min提升至985 r/min,而增加转子偏心率,会导致拍击门槛转速先缓慢升高后迅速降低,为抑制变速椭圆齿轮泵的拍击振动和噪声及提升无拍击状态下最大瞬时流量提供理论依据。
齿轮;齿轮泵;非线性振动;拍击状态;拍击门槛
0 引 言
非圆齿轮能够实现两轴间精确的变速比传动,广泛应用于农作物移栽机械[1-3]、汽车差速器[4]、采油机[5]和人工血泵[6]等。针对农业上的大流量流体输送需求,徐高欢等[7]将非圆齿轮与叶片泵融合,提出了一种大排量叶片差速泵,具有良好的流体输送性能。而利用高阶椭圆齿轮替换齿轮泵转子,可以获得另一种大排量容积泵,针对该泵的流量脉动问题,Liu等[8]通过外部非圆齿轮变速驱动,实现椭圆齿轮泵流量均化,不仅其排量数倍于同泵腔容积的圆齿轮泵,而且瞬时流量均匀,在农业、石油、化工、食品、医疗和交通等领域具有广阔应用前景。但由于非圆齿轮存在特殊内部激励,容易引发拍击振动和噪声,严重影响泵的使用性能,因此研究该泵的非线性动力学,揭示拍击发生机制,是设计高品质变速椭圆齿轮泵的关键问题。
国内外众多学者对圆齿轮拍击动态特性进行了深入的研究,建立了综合考虑时变啮合刚度、阻尼比、齿侧间隙、误差等因素齿轮非线性动力学模型,深入分析了啮合刚度[9]、阻尼[10]、传递误差[11]、摩擦[12]、修形[13]以及激励幅值[14]等对分岔、混沌等非线性特性的影响机理,为圆齿轮系统的设计和优化奠定了理论基础。但非圆齿轮由于瞬心时变会引起额外的内部激励,其振动行为相对圆齿轮更加复杂。Huang等[15-16]设计了一种由非圆齿轮控制步态的仿生六足机器人并对其进行动力学分析,使其能够在地面快速移动和转向;Okada等[17]针对一种含非圆齿轮的弹跳机器人进行了动力学分析,并对其弹跳性能进行了优化;李宪奎等[18]研究了椭圆齿轮驱动连铸机非正弦振动时的低频共振现象。叶秉良等[19]提出了椭圆齿轮-不完全非圆齿轮行星系旋转式水稻钵苗移栽机构,并对其动力学仿真计算得出支座振动的主要因素。王丽红等[20]中提出了一种用于番茄果秧分离的非圆齿轮振动发生器,通过传动比设计实现特定振动规律。上述研究中主要关注整个机械系统的动力学特性,因此在动力学建模中只计入了非圆齿轮变速转动引起的动态惯性扭矩,而忽略了轮齿的弹性变形。
针对非圆齿轮的非线性传动比导致齿间弹性变形不易表征的问题,刘大伟等[21]提出了基于弹性转角分离的非圆齿轮扭振模型,分析了时变瞬心、转速和负载等参数对非圆齿轮动态响应的影响,应用该方法,Liu等[22-23]分别建立了非圆面齿轮的弯-扭-轴耦合振动模型以及两级非圆齿轮纯扭振模型,并得到振动响应随齿轮参数的演变规律;Gao等[24]研究了椭圆齿轮参数振动与稳定性,但以上模型中忽略了齿侧间隙,无法反映齿轮的拍击行为以及由此产生的振动和噪声。Liu等[25]引入齿侧间隙,建立了一对椭圆齿轮的非线性振动模型,通过仿真得到了齿轮扭矩、转速的振动规律以及轮齿发生分离的临界值,进一步通过试验方法测试了椭圆齿轮的实际扭矩、转速[26]及噪声[27]等特性,发现椭圆齿轮的非匀速旋转将使轮齿在低速时发生轮齿分离,当转速超过临界转速时,系统将产生严重的拍击和噪声。董长斌等[28]着重分析了含间隙时椭圆齿轮的主要参数对齿轮振动性质的影响规律。针对空间非圆齿轮,Lin等[29-30]研究了一种曲线面齿轮的非线性振动问题,揭示了不同条件下该齿轮会发生多周期、拟周期和混沌振动现象。上述研究表明:非圆齿轮由于时变瞬心的影响,会比圆齿轮更容易产生拍击振动和噪声,研究非圆齿轮的拍击动力学,抑制拍击振动,对提升含非圆齿轮的机械系统动态特性具有重要的意义。但目前考虑齿侧间隙的非圆齿轮拍击动力学研究,尚局限于一对齿轮副,无法解释非圆齿轮轮系的拍击行为。
为此,本文针对包含两级非圆齿轮传动机构的变速椭圆齿轮泵,考虑轮齿弹性变形和齿侧间隙,建立了周期负载下两级非圆齿轮的拍击振动模型,定量分析该泵的拍击振动行为及主要参数对拍击状态、拍击门槛转速等参数的影响规律,拟为抑制变速椭圆齿轮泵的拍击振动和噪声提供理论依据。
1 变速椭圆齿轮泵的机构原理
高阶椭圆齿轮泵的内部结构与普通齿轮泵相似,区别在于转子为一对椭圆齿轮,如图1a所示,它通过椭圆齿轮向径最长处的轮齿对液体进行封闭,储液腔为图1b中的月牙部分,故相对于相同泵腔容积和模数的圆齿轮泵,非圆齿轮泵具有大排量的优势。
伴随大排量,椭圆齿轮泵会产生剧烈的流量脉动,椭圆齿轮转子旋转一周,瞬时流量的波动次数与椭圆齿轮阶数相同。Liu等[8]提出采用非圆齿轮变速驱动流量脉动平抑原理,如图2所示,在非圆齿轮泵外部增加一对特殊的非圆齿轮,通过改变齿轮泵的瞬时转速消除流量脉动。
以实现均匀流量为目标,根据椭圆齿轮泵的瞬时流量公式,反求的外部非圆齿轮的传动比为
式中12分别为外部主动非圆齿轮1和从动非圆齿轮2的角速度,rad/s;为椭圆齿轮泵转子偏心率,无量纲;为椭圆齿轮泵两转子中心距的一半,m;为泵腔半径,m;3为主动椭圆齿轮3的节曲线向径,m;3为主动椭圆齿轮3的转角,rad。外部从动非圆齿轮2与主动椭圆齿轮3固定在同一个轴上,二者的转角相等,从公式(1)可以看出,外部非圆齿轮的传动比是以从动非圆齿轮转角为自变量构建的,而泵内部椭圆齿轮的传动比自变量是主动椭圆齿轮转角,其表达式为
式中34分别为主动椭圆转子3和从动椭圆转子4的角速度,rad/s;4为从动椭圆齿轮4节曲线向径,m;为椭圆齿轮阶数,无量纲。
根据式(1)、(2)设计的椭圆齿轮泵,可以完全平抑因椭圆形转子产生的低频大幅脉动,从而实现椭圆齿轮泵的稳定大流量输送[8]。
2 变速椭圆齿轮泵传动系统的动力学模型
2.1 力学模型
为研究泵在不同工况下的振动性能,对其传动系统进行动力学建模。变速椭圆齿轮泵的传动系统为两级非圆齿轮机构,考虑轮齿弹性及齿侧间隙,基于集中参数法建立两级非圆齿轮机构的动力学模型,建模中做如下假设:
1)考虑非线性阻尼对系统动态响应影响较小,忽略齿侧间隙对啮合阻尼的影响,认为阻尼为线性;
2)轴的刚度远大于齿轮啮合刚度;
3)忽略齿轮弹性振动对传动比的影响。
非圆齿轮简化成集中质量,考虑非圆齿轮静态传递误差和齿侧间隙的啮合轮齿通过图3中静态传递误差、弹簧、阻尼和间隙元件的组合机构表示,其中弹簧和阻尼的受力方向与轮齿啮合力方向相同。
1.静态传递误差 2.间隙 3.直线弹簧4.直线阻尼
1.Static transfer error 2.Clearance 3.Linear spring 4.Linear damping
图3 啮合轮齿的等效机构
Fig.3 Equivalent mechanism of meshing gear teeth
根据以上假设和简化,可得到两级含间隙非圆齿轮机构的力学模型,如图4所示。非圆齿轮集中质量的轮廓线由非圆齿轮齿廓的渐屈线表示,在本文中将该渐屈线称为非圆齿轮基圆。根据假设3),在任意时刻啮合轮齿等效机构都与两非圆齿轮的基圆相切。
1.外部主动非圆齿轮 2.外部从动非圆齿轮 3.齿轮泵主动椭圆转子 4.齿轮泵从动椭圆转子
1.External driving noncircular gear 2.External driven noncircular gear 3.Driving elliptical rotor of gear pump 4.Driven elliptical rotor of gear pump
注:r1、r2、r3、r4分别为齿轮1、2、3、4的瞬时基圆半径,m;k1、c1为齿轮1、2间的啮合刚度和阻尼,N·m-1,N·(s·m-1);k2、c2为转子3、4间的啮合刚度和阻尼,N·m-1,N·(s·m-1);1、2分别为为齿轮1、2和转子3、4齿侧间隙的一半,m;1、2分别为齿轮1、2上和转子3、4上的静态传递误差幅值,m;T为输入转矩,N·m;T3、T4为齿轮3、4上的负载转矩,N·m。
Note:r1,r2,r3andr4are instantaneous base circle radii of gears 1, 2, 3 and 4 respectively, m,k1,c1are the meshing stiffness and damping between gears 1 and 2, N·m-1, N·(s·m-1),k2、c2are the meshing stiffness and damping between rotors 3 and 4, N·m-1, N·(s·m-1),1and2are half of the backlash of gears 1 and 2 and rotors 3 and 4 respectively, m,1and2are the static transfer error amplitudes on gears 1 and 2 and rotors 3 and 4 respectively, m,Tis the input torque, N·m,T3andT4are the load torque on gears 3 and 4, N·m.
图4 两级非圆齿轮力学模型
Fig.4 Mechanical model of two-stage noncircular gears
2.2 齿间动态啮合力
在齿轮传动过程中,齿轮的实际转角由刚性转角和弹性转角两部组成,其中刚性转角为两齿轮按照理想传动比转过的角度,弹性转角为轮齿弹性变形产生的转角,轮齿间的相对位移和啮合力均可由弹性转角表示,则图4中两对非圆齿轮之间的相对位移为
式中θ(=1,2,3,4)为非圆齿轮的弹性转角,rad;瞬时基圆半径由下式求得。
式中0为刀具的齿形角,rad;r(=1,2,3,4)为非圆齿轮的瞬时节曲线向径,m;1和2分别为非圆齿轮1、2和非圆齿轮3、4的节曲线向径与其切线在正方向上的夹角,rad;正、负号分别代表齿轮的左、右齿廓。
考虑齿侧间隙,齿轮1、2间的相对弹性位移为
同理,齿轮3、4间的相对弹性位移表示为
根据假设(1),不考虑齿侧间隙对啮合阻尼的影响,对式(3)求导,可得两对非圆齿轮的相对速度为
则两对非圆齿轮间的动态啮合力分别为
式中12为齿轮2对齿轮1的作用力,N;34为齿轮4对齿轮3的作用力,N。
2.3 非圆齿轮刚性角加速度
在图4中非圆齿轮1与电机相连,以角速度1匀速转动。由于非圆齿轮变传动比特点,非圆齿轮2、3和4均为非匀速运动,因此转动过程必然会产生惯性力。根据假设2),固定在同一根传动轴上的非圆齿轮2和3具有相同的运动规律,即刚性转角和弹性转角相同,则非圆齿轮2或转子3的刚性角速度和角加速度为
式中2为从动非圆齿轮2或转子3的刚性角速度,rad/s;2为非圆齿轮2的刚性转角,rad;2为非圆齿轮2或3的刚性角加速度,rad/s2;非圆齿轮4的刚性角速度和角加速度为
式中4为从动椭圆齿轮4刚性角速度,rad/s;4为非圆齿轮4的刚性角加速度,rad/s2;其中2=3。
2.4 齿轮泵转子的负载扭矩
转子的负载扭矩包括泵口压强作用在转子上产生的扭矩T和转子转动带来的黏性摩擦力T,考虑到齿间和轴承的摩擦等对齿轮传动效率的影响,取两级非圆齿轮间传递效率为95%计算系统的负载扭矩。
式中L3、L4为转子3、4上的负载扭矩,N·m;c3、c4为由转子与泵体内壁因相对转动而产生的粘性摩檫阻力矩,N·m;P3、P4为泵口压强作用在转子3、4上的负载转矩N·m;将两椭圆转子简化成直径为中心距、厚度为齿厚的两圆柱,代入扭转阻尼器阻力公式得c3、c4为
式中为油液黏度,MPa·s;为转子3、4齿宽,m;为转子端面与泵腔间隙,m。
泵口压强作用在转子3、4上的负载(图5)转矩P3、P4为
式中为椭圆齿轮泵的出口压强,MPa。
注:3、4为高压液体作用在转子3、4上的压力,N;3、4为椭圆齿轮泵转子与泵壳内壁接触点;3、4为椭圆齿轮泵主从动齿轮啮合点;3、4分别为线段33、44中点。
Note:3and4are the pressure of high pressure liquid acting on rotor 3 and 4 respectively, N,3and4are the contact points between the rotor and the inner wall of the pump shell,3and4are meshing points of driving and driven gears of elliptical gear pump,3and4are the midpoint of33and44respectively.
图5 椭圆齿轮泵受力分析
Fig.5 Force analysis of elliptical gear pump
2.5 运动微分方程
在图4中非圆齿轮1以角速度为1匀速转动,其他非圆齿轮的刚性转角规律可由式(9)~(10)确定。根据各非圆齿轮的受力平衡,可以推导出两级非圆齿轮的运动微分方程为
式中2、3、4为非圆齿轮2、3、4的转动惯量,kg·m2。
3 拍击振动仿真结果与分析
基于两级非圆齿轮运动微分方程,运用龙格-库塔法数值求解系统的动态响应,对系统的拍击振动进行仿真分析,以揭示系统拍击振动规律。引入3个参数表征系统的拍击行为,其中r表示拍击状态,当r取0、1、2时分别表示无拍击、单边拍击和双边拍击;齿间动态啮合力均方根F表示拍击振动强度;变速椭圆齿轮泵中任意齿轮发生拍击时齿轮1的临界转速n为拍击门槛转速。
以图2中变速椭圆齿轮泵为研究对象,进行拍击动力学仿真,其主要参数如表1所示。考虑实际工程中基频稳态响应占据主导地位,出于简化计算的目的,时变啮合刚度和静态传递误差均为仅考虑平均分量和基频分量的简谐函数,并且误差的平均分量为0。通过控制变量法,研究变速椭圆齿轮泵拍击行为的演变规律,依次改变输入转速1,泵口压强,齿轮静态传递误差12以及转子偏心率等参数的取值,计算相应的拍击状态值r,齿间动态啮合力均方根F以及拍击门槛转速n等,仿真中当泵系统参数中的任何一个变化时,其他参数均取表1中初始设计值[8]。
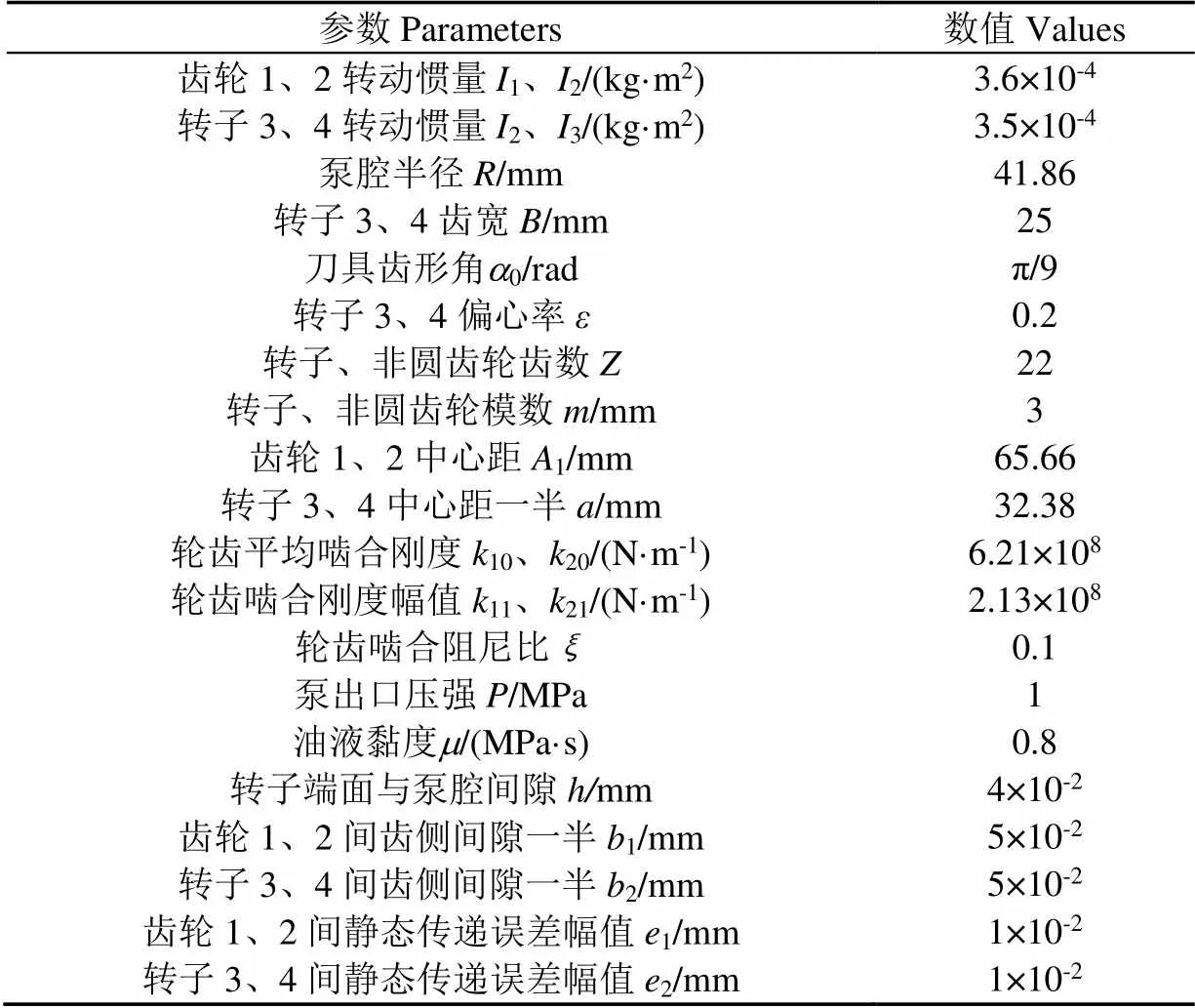
表1 变速椭圆齿轮泵的基本设计参数
3.1 转速对拍击行为的影响
图6中给出了转速1分别为500、1 500和2 500 r/min时齿轮2弹性转角2和转子4弹性转角4的时域图,从两个图中整体来看,随着转速的增加,两对非圆齿轮的振动均加剧,并且转子4比齿轮2的振动更剧烈。当转速1为500 r/min时,2和4均小于0,系统不发生拍击;当转速1为1 500 r/min时,2为0和负值,4出现正值和负值,表明齿轮1、2间发生了单边拍击,转子3、4间发生了双边拍击。当转速为2 500 r/min时,2和4正负交替出现表明两级非圆齿轮间均为双边拍击。
进一步对弹性转角进行傅里叶变换得到不相同转速下弹性转角频谱图,由图7发现,两对齿轮的主要频率成分为1=21/60的时变瞬心激励频率、2=1Z/60的轮齿啮合激励频率、两者的倍频以及和差型频率。对比图7中两个齿轮的幅值-频率图发现,转子4中时变瞬心频率对应的幅值远大于齿轮2,而两个齿轮中啮合频率对应的幅值接近,其原因为椭圆齿轮转子3、4的偏心程度远大于外部驱动齿轮1、2,从而导致转子4比齿轮2的振动程度更大,该现象在图6中也可以清晰地观察到。
注:1为时变瞬心激励,Hz;2为轮齿啮合激励,Hz。
Note:1is time varying instantaneous center excitation, Hz,2is tooth meshing excitation, Hz.
图7 齿轮2和转子4的弹性转角频谱图
Fig.7 Spectrum of elastic rotation angle for gear2 and rotor4
改变输入转速1,计算得到两对齿轮的拍击状态如图8a、8b所示。从整体来看,随着转速的升高,两对齿轮会依次经历无拍击、单边拍击和双边拍击状态。当转速1为985 r/min时,转子3、4由无拍击状态变化到单边拍击状态,系统的拍击门槛转速n=985 r/min。随着转速继续增大,转子3、4率先进入双边拍击状态,原因是转子4的振动程度远大于齿轮2,故在高转速下转子3、4相对齿轮1、2更容易诱发双边拍击。
图8c为两对齿轮的齿间动态啮合力F随转速的变化规律,当转速小于985 r/min时,两对齿轮处于无拍击状态,随着转速的提升,F缓慢地线性增加,而当转速大于985 r/min后,齿轮发生拍击振动,F整体上随转速提高而快速上升,说明拍击会引起齿间动态啮合力大幅增加。另外由于拍击行为的复杂性,F在局部还会出现小的振动。
3.2 系统参数对拍击门槛转速的影响
进一步计算泵口压强,齿轮静态传递误差1、2以及转子偏心率不同时,泵的拍击状态参数r,以及齿间动态啮合力均方根F,发现随着1、2和的增加以及的减小,泵中两对齿轮都会依次发生无冲击、单边冲击和双边冲击3种振动行为,在无冲击时,两对齿轮上F随1、2、或的增长而缓慢地线性增加,而一旦出现拍击,F将快速增加,从而引起系统产生强烈的振动和噪声。为了抑制拍击的发生,分别求出了拍击门槛转速n随系统参数的变化规律,如图9、10所示。
图9a为不同泵口压强下系统的拍击门槛转速,随着泵口压强增大,拍击门槛转速n提升,泵口压强由0增至3.5 MPa,系统的拍击门槛转速由118 r/min增至1 637 r/min,这与圆齿轮拍击门槛转速的变化规律相同,负载增加能有效抑制轮齿的分离,降低拍击振动的发生。但对于变速椭圆齿轮泵来说,齿轮2和转子4的非匀速转动将产生周期性惯性扭矩,当转速增加到一定程度后,两齿轮上负载扭矩与惯性扭矩之和必然会出现正、负交替现象,从而引起拍击,因此对变速椭圆齿轮泵,即便泵口具有较大压强,也应计算相应的拍击门槛转速,以防止拍击振动发生。
分别改变齿轮1、2间静态传递误差1和转子3、4间静态传递误差2,得到系统拍击门槛转速n如图9b所示。随着1和2增大,拍击门槛转速n均呈下降趋势,当转子4静态传递误差幅值由1´10-2mm升高至7´10-2mm时,拍击门槛转速由985 r/min降低至441 r/min,故加工精度降低容易诱发拍击现象。相对外部非圆齿轮1和2来说,内部转子3和4的静态传递误差对n影响更大,为提高拍击门槛转速,内部转子3、4的精度应比外部非圆齿轮1、2更高。
转子偏心率越大变速椭圆齿轮泵排量越大,泵腔容积的利用率越高。图10a给出了偏心率∈[0.05,0.6]时拍击门槛转速的变化规律。当偏心率从0.05增大到0.15时,拍击门槛转速n出现小幅上升趋势,随着偏心率继续增大,拍击门槛转速n大幅下降。
为解释以上现象,求出了在系统参数下1为600 r/min时系统的齿间啮合力随的变化曲线,如图10b所示,当偏心率从0.05增大到0.15时,两齿轮间的平均啮合力与啮合力峰间值均程上升趋势,峰间值虽然上升速度快,但幅值不大,齿间整体啮合力随增大而缓慢增大,从而对拍击产生一定的抑制作用,使n小幅上升;随着继续增大,平均啮合力缓慢增长,而啮合力峰间值依然快速增长,导致振动加剧,齿轮容易脱齿,相应n大幅下降。故增大偏心率虽然能提升变速椭圆齿轮泵排量,但其转速受拍击振动限制,实际工作中的有效流量并不一定得到提升,因此偏心率的设计必须同时兼顾泵的排量和临界转速。
4 样机振动测试与分析
根据表1参数设计的变速椭圆齿轮泵试验装置如图11所示,由椭圆齿轮泵、变速非圆齿轮和变频电机组成。椭圆齿轮转子3、4通过轴承安装在泵体内部,故转子3、4的扭振将通过轴承座传递到泵体上,将两个加速度传感器分别布置在泵体侧面和上面,使两个加速度传感器轴线相互垂直且垂直于转子3、4轴线。泵的出油口置于空气中,设置采样频率为1 000 Hz,调节输入转速得到系统不同流量下的振动数据。
将采集到的数据降噪滤波后进行傅里叶变换,得到泵体加速度的幅值-频域曲线。由于理论计算得到的是齿轮扭振响应,试验测得的是泵体振动数据,二者在振动幅值上无法对应,因此对振动频率成分进行对比。图12a给出了电机转速为130 r/min时泵体加速度频谱图,测得系统主要含8、48.2和100 Hz的频率成分。继续调节电机转速得到输入转速1=300 r/min时系统得频谱图如图12b所示,对比图12a发现调节转速后系统所受激励组成基本不变,激励幅值增大,与图7理论计算的变化趋势相符。图13为输入转速1=130 r/min理论计算所得频域图,其中时变瞬心激励频率1=4.33 Hz、轮齿啮合激励频率2=47.67 Hz,对比输入转速1=130 r/min时系统理论计算频谱和试验所得频谱,发现试验所得泵体加速度激励组成与理论计算基本吻合,但试验所得频谱只有时变瞬心激励二倍频,无其基频。
出现上述偏差的原因为:1)理论计算为单个转子的弹性转角加速度动态特性,而实验所测为两转子扭振传递到泵体上叠加后的振动特性;2)时变瞬心激励周期较轮齿啮合激励周期更长,其加速度幅值较小,更易受到振动噪声的干扰;3)齿轮的振动经过轴承座传递到泵体上衰减较大,测量存在误差,故实验值与理论值具有一定的偏差。
本文所研究的变速椭圆齿轮泵,具有大排量、低脉动的突出优势,可用于农业灌溉、液态肥料输送,农机燃油供给以及植保等场合。
5 结 论
1)变速椭圆齿轮泵中,泵内转子的振动比外部非圆齿轮的振动更大,且两级非圆齿轮的振动中都包含时变瞬心激励频率、轮齿啮合激励频率以及二者的倍频与差、和频率成分。
2)随着输入转速的增大,两级非圆齿轮会依次经历无拍击、单边拍击和双边拍击状态,当输入转速低于985 r/min时,系统处于无拍击状态,齿间动态啮合力呈线性缓慢增加,一旦出现拍击,齿间动态啮合力将迅速增大。
3)提高泵口压强或齿轮的制造精度,能提升变速椭圆齿轮泵的拍击门槛转速,泵口压强由0增至3.5 MPa,系统的拍击门槛转速由118 r/min增至1 637 r/min。将转子4静态传递误差幅值由7´10-2mm降低至1´10-2mm,拍击门槛转速由441 r/min提升至985 r/min,而在两对非圆齿轮中,提高泵内转子的精度对拍击的抑制更为显著。
随着转子偏心率增大,拍击门槛转速会先缓慢上升然后快速降低,拍击门槛最大值出现在偏心率为0.15附近,增大偏心率虽然可以增大泵的排量,但由于拍击门槛转速的下降,泵的流量不一定能得到提升。
[1] 孙良,沈嘉豪,周誉株,等. 非圆齿轮-连杆组合传动式蔬菜钵苗移栽机构设计[J]. 农业工程学报,2019,35(10):26-33.
Sun Liang, Shen Jiahao, Zhou Yuzhu, et al. Design of non-circular gear linkage combination driving type vegetable pot seedling transplanting mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(10): 26-33. (in Chinese with English abstract)
[2] 吴国环,俞高红,项筱洁,等. 三移栽臂水稻钵苗移栽机构设计与试验[J]. 农业工程学报,2017,33(15):15-22.
Wu Guohuan, Yu Gaohong, Xiang Xiaojie, et al. Design and test of rice potted-seedling transplanting mechanism with three transplanting arms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 15-22. (in Chinese with English abstract)
[3] 王永维,何焯亮,王俊,等. 旱地蔬菜钵苗自动移栽机栽植性能试验[J]. 农业工程学报,2018,34(3):19-25.
Wang Yongwei, He Zhuoliang, Wang Jun, et al. Experiment on transplanting performance of automatic vegetable pot seedling transplanter for dry land[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(3): 19-25. (in Chinese with English abstract)
[4] 贾巨民,高波. 越野汽车双联非圆行星齿轮差速器的研究[J]. 中国机械工程,2012,23(3):346-348.
Jia Jumin, Gao Bo. A novel noncircular planetary differential for off-road vehicles[J]. China Mechanical Engineering, 2012, 23(3): 346-348. (in Chinese with English abstract)
[5] Xu G Y, Hua D Z, Dai W J, et al. Design and performance analysis of a coal bed gas drainage machine based on incomplete non-circular gears[J]. Energies, 2017, 10(12): 1933.
[6] Tao D, Wang Y, Chen J, et al. Design and analysis of non-circular gear slider-crank mechanisms used as driver for pulsating blood flow generators[J]. China Mechanical Engineering, 2017, 28(16): 1914-1920, 1927.
[7] 徐高欢,孙培峰,谢荣盛. 自由节曲线非圆齿轮驱动六叶片差速泵多目标参数优化及试验[J]. 农业工程学报,2020,36(16):17-24.
Xu Gaohuan, Sun Peifeng, Xie Rongsheng. Multi-objective parameters optimization and experiments of six-blade differential pump driven by non-circular gear with free pitch curve[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(16): 17-24. (in Chinese with English abstract)
[8] Liu D W, Ba Y B, Ren T Z. Flow fluctuation abatement of high-order elliptical gear pump by external noncircular gear drive[J]. Mechanism and Machine Theory, 2019, 134: 338-348.
[9] 王立华,李润方,林腾蛟,等. 齿轮系统时变刚度和间隙非线性振动特性研究[J]. 中国机械工程,2003,14(13):1143-1146.
Wang Lihua, Li Runfang, Lin Tengjiao, et al. Research on nonlinear vibration characteristics due to time- varying mesh stiffness and gear backlash in gear system[J]. China Mechanical Engineering. 2003, 14(13): 1143-1146. (in Chinese with English abstract)
[10] Xu L, Lu M W, Cao Q. Nonlinear vibrations of dynamical systems with a general form of piecewise-linear viscous damping by incremental harmonic balance method[J]. Physics Letters A, 2002, 301(1/2): 65-73.
[11] 陈安华,罗善明,王文明,等. 齿轮系统动态传递误差和振动稳定性的数值研究[J]. 机械工程学报,2004, 40(4):21-25.
Chen Anhua, Luo Shanming, Wang Wenming, et al. Numerical investigations on dynamic transmission error and stability of a geared rotor-bearing system[J]. Journal of Mechanical Engineering, 2004, 40(4): 21-25. (in Chinese with English abstract)
[12] Vaishya M, Singh R. Analysis of periodically varying gear mesh systems with coulomb friction using floquet theory[J]. Journal of Sound & Vibration, 2001, 243(3): 525-545.
[13] 陈思雨. 圆柱齿轮传动齿面形状与非线性特性关联规律分析及实验研究[D]. 长沙:中南大学,2012.
Chen Siyu. Numerical and Experimental Analysis of Nonlinear Gear Transmission System Coupled With Gear Profile Appearances[D]. Changsha: Central South University, 2012. (in Chinese with English abstract)
[14] 张锁怀,沈允文,董海军,等. 单级齿轮系统拍击特性研究[J]. 机械工程学报,2003, 39(3):28-31.
Zhang Suohuai, Shen Yunwen, Dong Haijun, et al. Research on rattling dynamics of one-stage gear system[J]. Journal of Mechanical Engineering, 2003, 39(3): 28-31. (in Chinese with English abstract)
[15] Huang K J, Chen S C, Komsuoglu H, et al. Design and performance evaluation of a bio-Inspired and single-motor-driven hexapod robot with dynamical gaits[J]. Journal of Mechanisms and Robotics, 2015, 7(3): 031017.
[16] Huang K J, Chen S C, Komsuoglu H, et al. A bio-inspired hexapod robot with noncircular gear transmission system[C]//IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2012: 33-38.
[17] Okada M, Takeda Y. Optimal design of nonlinear profile of gear ratio using non-circular gear for jumping robot[C]// IEEE International Conference on Robotics & Automation. 2012: 1958-1963.
[18] 李宪奎,杨红普,杨拉道. 椭圆齿轮驱动的结晶器低频共振分析[J]. 机械工程学报,2008,44(5):231-237.
Li Xiankui, Yang Hongpu, Yang Laodao. Low-frequency resonance of mold driven by oval grars[J]. Chinese Journal of Mechanical Engineering, 2008, 44(5): 231-237. (in Chinese with English abstract)
[19] 叶秉良,易卫明,俞高红,等. 不完全非圆齿轮传动钵苗移栽机构缓冲装置研究[J]. 农业机械学报,2017,48(3):69-75.
Ye Bingliang, Yi Weiming, Yu Gaohong, et al. Buffer device of transplanting mechanism for plug seedlings based on transmission with incomplete non-circular gears[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 69-75. (in Chinese with English abstract)
[20] 王丽红,张娜,坎杂,等. 用于番茄果秧分离的多组非圆行星轮系振动发生器设计[J]. 农业工程学报,2017,33(12):34-39.
Wang Lihong, Zhang Na, Kan Za, et al. Design of tomato fruit separation vibration generator with multi group non-circular planetary gear[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 34-39. (in Chinese with English abstract)
[21] 刘大伟,任廷志,巴延博,等. 基于弹性转角分离的非圆齿轮扭振模型及其动态特性[J]. 振动与冲击,2016,35(23):228-233.
Liu Dawei, Ren Tingzhi, Ba Yanbo, et al. Torsional vibration model and its dynamic characteristics for a noncircular gear based on separation of elastic rotating angle[J]. Journal of Vibration and Shock, 2016, 35(23): 228-233. (in Chinese with English abstract)
[22] Liu D W, Gu D D, Liu Z J. Coupled vibration modeling and dynamic characteristics of noncircular face gear drive system with time-varying instantaneous center excitation[J]. Archive Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019, 233(14): 4947-4959.
[23] 刘大伟,巴延博. 低脉动椭圆齿轮泵的多参变扭振模型及动态特性[J]. 振动与冲击,2020,39(3):88-94.
Liu Dawei, Ba Yanbo. Multi-parameter torsional vibration model and dynamic features of an elliptical gear pump with low flow fluctuation[J]. Journal of Vibration and Shock, 2020, 39(9): 88-94. (in Chinese with English abstract)
[24] Gao N, Meesap C, Wang S Y, et al. Parametric vibrations and instabilities of an elliptical gear pair[J]. Journal of Vibration and Control, 2020, 26(19/20): 1721-1734.
[25] Liu X, Nagamura K, Ikejo K. Simulation on the vibration characteristics of elliptical gears[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2013, 227(4): 819-830.
[26] Liu X, Nagamura K, Ikejo K. Analysis of the dynamic characteristics of elliptical gears[J]. Journal of Advanced Mechanical Design, Systems and Manufacturing, 2012, 6(4): 484-497.
[27] Liu X, Nagamura K, Ikejo K. Vibration and noise characteristics of elliptical gears due to non-uniform rotation[J]. Journal of Advanced Mechanical Design, Systems and Manufacturing, 2012, 6(4): 498-512.
[28] 董长斌,刘永平,魏永峭,等. 椭圆齿轮传动系统非线性动态特性分析[J]. 吉林大学学报,2020,50(2):483-493.
Dong Changbin, Liu Yongping, Wei Yongqiao, et al. Analysis of nonlinear dynamic characteristic of elliptic gear transmission system[J]. Journal of Jilin University, 2020, 50(2): 483-493. (in Chinese with English abstract)
[29] Lin C, Liu Y. Gu S J. Analysis of nonlinear twisting vibration characteristics of orthogonal curve‑face gear drive[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2015, 37(5): 1499-1505.
[30] Lin C, Cai Z Q. Modeling of dynamic efficiency of curve–face gear pairs[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(7/8): 1209-1221.
Nonlinear vibration model and rattling characteristics of elliptical gear pump with timing-varying input speed
Liu Dawei1, Tan Wanxin1, Jin Xin2, Ren Tingzhi2
(1.,,066004,; 2.,,066004,)
A pair of outer noncircular gear has widely been used to prevent severe flow pulsation in a variable-speed elliptic gear pump. The displacement is normally several times that of the circular gear pump with the same pump cavity volume, while the instantaneous flow rate is uniform. The structure can be expected to broadly apply in agriculture, petroleum, chemical industry, food, medical treatment, and transportation. However, the beating vibration and noise that occurred easily can be detrimental to the performance of a pump, because of the special internal excitation of non-circular gear. Therefore, it is necessary to explore the nonlinear dynamics of the pump, and thereby reveal the mechanism of a rattle for better design of a high-quality elliptical gear pump with variable speed. In this study, a transmission ratio function of a two-stage non-circular gear mechanism was constructed in a variable-speed elliptical gear pump using the flow pulsation suppression of an elliptic gear pump driven by external non-circular gear. A nonlinear rattle vibration model was established in a variable-speed elliptical gear pump using the separation of elastic rotating angle considering the elastic deformation of the teeth, the static transmission error, the backlash between teeth, and the periodic load. A Runge-Kutta method was utilized to calculate the dynamic responses for the vibration curve, excitation composition, and amplitude at different rotate speeds. A systematic analysis was made on the evolution in the rattle state and system intensity, as well as the influences of pump port pressure, transmission error, and eccentricity on the rattle threshold rotation speed. The results showed that the vibration of the internal rotor was greater than that of external non-circular gear in a variable-speed elliptical gear pump. Moreover, the vibration of two-stage non-circular gears contained the time-varying instantaneous center excitation frequency, the tooth meshing excitation frequency, the multiplication, difference, and sum of these frequencies. The two-stage non-circular gears successively experienced the states of no impact, unilateral impact and bilateral impact with the increase of input rotation speed. Compared with the outer noncircular gears 1 and 2, the internal rotors 3 and 4 vibrated more violently, and entered the rattle state earlier. The dynamic meshing force rose linearly and slowly, when there was no rattle. Once the rattle occurred, the dynamic meshing force rose rapidly. Improving the pump port pressure or the manufacturing accuracy of gears can improve the rattle threshold rotation speed of a variable-speed elliptical gear pump. Among the two pairs of non-circular gears, the internal rotors 3 and 4 had a greater influence on the rattle threshold rotation speed. The rattle threshold rotation speed increased slowly and then decreased rapidly, as the rotor eccentricity advanced. Therefore, the flow rate of a pump cannot be improved, although the eccentricity can contribute to the pump displacement, due mainly to the reduction of rattle threshold rotation speed.
gear; gear pump; non-linear vibration; rattling state; rattling threshold
2020-12-08
2021-03-13
国家自然科学基金资助项目(51705444)
刘大伟,博士,副教授,研究方向为非圆齿轮设计制造与创新应用,脊柱机构与仿生机器人。Email:liudw@ysu.edu.cn
10.11975/j.issn.1002-6819.2021.07.003
TH132
A
1002-6819(2021)-07-0015-09
刘大伟,谭万鑫,金昕,等. 变速椭圆齿轮泵的非线性振动模型与拍击特性[J]. 农业工程学报,2021,37(7):15-23. doi:10.11975/j.issn.1002-6819.2021.07.003 http://www.tcsae.org
Liu Dawei1, Tan Wanxin, Jin Xin, et al. Nonlinear vibration model and rattling characteristics of elliptical gear pump with timing-varying input speed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(7): 15-23. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.07.003 http://www.tcsae.org
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
辽宁工程技术大学学报(自然科学版)(2022年1期)2022-03-28
舰船电子工程(2022年2期)2022-03-14
舰船科学技术(2021年3期)2021-04-12
小资CHIC!ELEGANCE(2019年20期)2019-07-02
农家科技(2018年8期)2018-10-15
中国建筑金属结构(2018年4期)2018-05-23
中国科技纵横(2017年17期)2017-10-19
农业与技术(2016年22期)2017-03-07
中国青年(1953年10期)1953-08-17