自动驾驶矿卡底盘线控改装设计研究*
2021-07-03 04:10袁政米承继刘洲陶晓
汽车实用技术 2021年12期
袁政,米承继,刘洲,陶晓
(1.长沙智能驾驶研究院有限公司,湖南 长沙 410006;2.湖南工业大学,湖南 株洲 410200)
前言
近年来随着AI人工智能的兴起,世界正吹起一股自动驾驶的浪潮。目前,自动驾驶这一技术已日趋成熟,一方面各类型的创业公司层出不穷,另一方面各级政府也出台了支持智能驾驶的相关政策[1]。就目前来看,相对封闭的矿区,可能是自动驾驶最有可能落地的场景之一,随着人工智能、5G、V2X等高新技术的不断发展,封闭式/半开放式道路环境下的自动驾驶以及列队行驶已进入全面井喷的局面[2]。
自动驾驶矿卡作为智慧矿山重要组成部分,主要解决矿区的运输问题,直接关系到矿区的采矿效率,所以矿区都非常重视[3]。一方面自动驾驶可以减少矿区的安全事故,提高工作效率,降低了工作危险,另一方面可以改善司机的工作环境,减少司机的人员成本[4]。因此,发展自动驾驶矿卡有重要的现实意义。
线控技术是实现矿卡自动驾驶的基础,目前矿卡线控技术主要有前装线控和后装线控两种技术路线。前装线控只能针对一种车型实施,且各大主机厂也没推出成熟可落地的线控解决方案。因此前装线控技术路线不能规模化推广复制。后装线控就是在矿卡出厂后,对矿卡进行线控化升级改造。即通过更改、加装的方式将车辆的油门、制动、转向、挡位、手刹、车灯、雨刮等功能升级为电信号控制,智能线控化改造的目的在于能够为自动驾驶提供电信号接口。这种技术路线能适用于不同品牌、不同型号、不同吨位的矿卡。并且,后装线控技术路线能够对大量现存的矿卡进行线控改装升级,能够实现规模化复制和推广,极大节省了成本,避免了已有资源的浪费[5]。
为了满足某水泥矿山建设智能装运系统的需求,在矿山已有的2台载重32吨的矿卡上进行智能化线控改装升级,实现矿卡能够进行自动驾驶的需求。
1 自动驾驶整体方案设计
为了实现矿卡的自动驾驶,需要搭载先进的车载传感器、控制器、执行器等装置,并融合网络技术、人工智能技术等,实现自动驾驶矿卡具备复杂环境多重冗余感知、高精定位、智能决策、协同控制等功能,最终实现矿卡能够在矿区自动驾驶来进行物料转运的功能。
整体设计方案如图1所示,矿卡自动驾驶系统由四大部分组成,分别是:定位与感知层、决策和规划层、控制层、执行层。
定位与感知层是利用GNSS、RTK、LiDAR、IMU、车辆底盘等多传感器数据融合优化建图与高精度定位能力,满足拥有路端定位导航能力。并利用激光雷达、毫米波雷达、摄像头、超声波雷达等多种传感器感知车辆周边环境,通过感知融合算法提取环境信息,包括道路、车辆和行人信息,实现对车辆、行人、石头等障碍物地准确识别[6-7]。
决策和规划环节将多传感器收集的感知结果和地图信息等进行融合,根据自动驾驶的任务需求进行决策,避开行驶道路上可能存在的障碍物[8],并通过一些约束条件规划多条可选安全路径,并在这些路径中选取最优路径作为车辆最终的行驶轨迹。
控制层是根据路径规划算法、轨迹跟踪算法和整车控制算法做出控制决策。车辆控制技术通过环境感知技术对车辆自身和周边环境的感知,根据决策规划出目标轨迹,通过纵向和横向控制系统的配合使汽车跟踪目标轨迹准确稳定行驶,同时使汽车在行驶过程中能够实现车速调节、车距保持、换道、超车等基本操作[9-10]。
执行层是指底层的驱动系统如油门、刹车、转向和挡位控制作相应的执行动作。执行是实现智能驾驶的重要环节,车辆的纵向和横向控制系统控制汽车按照决策环节规划的行驶轨迹平稳准确行驶,并保证矿卡的舒适性、稳定性等性能。
由以上可知,车辆的线控系统是自动驾驶技术最终执行端,车辆线控系统直接影响车辆的转向、油门、制动、挡位、驻车、灯光、喇叭、雨刮等系统的性能,线控系统也是影响车辆安全的重大要素。
2 自动驾驶线控底盘技术方案
线控底盘,即通过更改、加装的方式将车辆油门、制动、转向、挡位、手刹、车灯、雨刮等功能升级为电信号控制。线控底盘改造的目的在于能够为自动行驶提供电信号接口。
2.1 转向系统
如下图2所示,矿卡原车转向系统为全液压转向系统,方向盘通过转向柱带动转向器转动,从而带动油缸驱动轮子转向。为了实现线控转向,需要在方向盘和转向器之间增加一套电控驱动机构。电控驱动机构一般由伺服电机、减速机构、角度传感器、控制器、扭矩传感器等组成。通过闭环控制策略,实现电控转向。

图2 原车全液压转向系统原理图
在实际应用中,我们采用在原车转向柱上增加一套EPS执行机构的方案。线控转向系统安装原理如图3所示。通过在方向盘与转向器之间的转向管柱上增加一套EPS转向系统,用以直接驱动原车转向器。该EPS转向系统集成了电机、减速机、角度传感器和扭矩传感器,并且可以通过CAN总线控制。

图3 线控转向系统升级示意图
由于原车转向系统是全液压转向系统,液压存在内泄漏和溢流的问题,方向盘角度和车轮角度关系是不对应的、非线性、不固定传动比的。所以在车轮上加装角度传感器,实现车轮绝对转角的反馈。该绝对角度通过模拟信号发送给EPS控制器。
在自动驾驶模式下,线控执行机构控制器通过CAN总线接收到车轮目标转向角度和方向信息,同时通过CAN总线下发方向盘转角指令给EPS控制器。EPS控制器结合线控执行机构控制器提供的方向盘转角指令信号对前轮位置进行伺服控制,实现自动驾驶功能。在自动驾驶的过程中,如果人工介入接管方向盘,该EPS内置的扭矩传感器会检测到扭矩差,EPS能够及时切换到EPS随动模式,从而退出自动驾驶模式。当车辆由人工驾驶时,则EPS进入随动模式,也可以轻松转动方向盘,不影响人工模式下正常开车。
2.2 油门系统
原矿卡油门踏板信号与发动机ECU直接连接,为了兼顾自动驾驶和人工驾驶,如下图4所示,在油门信号传输路径中加入长沙智能驾驶研究院自主研发的油门信号切换模块,通过驾驶模式切换开关来选择ECU油门踏板信号输入源,从而实现人工驾驶和自动驾驶的切换。
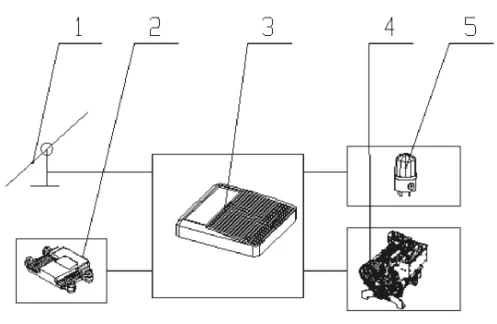
图4 线控油门系统示意图
2.3 制动系统
2.3.1 行车制动系统
原车制动系统为气制动系统,但是不带EBS系统,不能使用EBS的电控继动阀来进行线控制动。如果改气路增加电控阀来实现线控制动,对原车的影响较大。为了实现线控制动,本文在原车制动踏板前方加装一块副踏板和线控制动装置。如图5所示,线控制动装置通过螺钉固定在原车底板上,副踏板通过螺钉固定在原车制动踏板上。直线执行器装置带动摇臂来踩踏板,可以根据制动需求自动控制执行器的伸缩长度和位置,且此装置没有改动原车的气路系统,因此改装方案可靠性高、成本低、大大提高了车辆的安全性。

图5 线控制动装置改装图
在人工驾驶模式下,如下图所示,驾驶员踩下原车制动踏板,加装副踏板也跟随原车制动踏板一起下降,与线控制动装置的滚动轴承分离,线控制动装置和原车制动踏板互不干涉。

图6 人工踩下制动踏板状态图
自动驾驶模式下,如下图所示,线控执行机构控制器通过CAN总线发指令给执行器,直线执行器收到制动指令后收缩,从而带动摇臂绕支架转动,摇臂通过轴承将副踏板压下,从而实现电控制动。

图7 线控制动装置制动图
2.3.2 驻车制动系统
原车驻车制动系统如下图8所示,当矿卡需要驻坡或停放时,需要使用驻车制动,扳动驻车手阀到驻车位置,压缩空气经驻车继动阀控制口4,使驻车继动阀底部的排气口打开,使前后弹簧制动器驻车制动室的气体通过驻车继动阀排气口排入大气。手制动腔内的弹簧推动皮碗带动推杆,使凸轮轴转动,带动制动蹄压紧制动鼓,使前后轮同时锁死。

图8 原车驻车制动原理图
解除驻车制动时,压缩空气经驻车手阀进入驻车继动阀1口,再进入前后桥的手制动气室,压缩空气把压力输送到活塞的另一侧,气压移动活塞,克服弹簧的力量,带动推杆向后运动,解除手制动状态。
如图9所示,为了实现线控驻车,把原车驻车手阀改成两位三通常闭电磁阀,电磁阀开关分别并联按键开关和继电器。在人工驾驶模式下,可以通过开关按键来实现驻车和解除驻车;在自动驾驶模式下,可以通过线控底盘控制器来控制继电器的通断来实现驻车和解除驻车。

图9 线控驻车改装方案图
2.4 挡位系统
原车采用的电控液力自动变速箱,挡位是CAN总线控制的,可以通过原车总线接口和协议来实现挡位线控,不需要进行改装。
2.5 举升系统
如下图10所示,原车举升系统为气推油举升系统,通过气遥控阀来驱动举升操纵阀来实现举升和下降。为了防止误操作举升操纵杆,在气遥控阀的进气口前方加了一个电磁阀来控制举升控制系统是否与气源相通。气遥控阀(举升操纵杆)是通过搬到摇杆,来控制气阀的开关。向后推动时,靠气压推动举升操纵阀内的阀芯,使得举升操纵阀的B口开启,从而实现举升功能;向前搬到时,气压推动举升操纵阀的阀芯反向移动,使得举升操纵阀的A口开启,从而实现下降功能;不搬动摇杆时,举升操纵阀的A、B口均关闭,液压油经过P、T口流回液压油箱。

图10 原车举升机构工作原理图
如下图所示,为了兼顾自动驾驶和人工驾驶,把原车的手动气遥控阀改成三位五通电磁阀阀,三位五通电磁阀两端分别并联按键开关和继电器。在人工驾驶模式下,可以通过开关按键来实现举升和下降;在自动驾驶模式下,可以通过控制器控制继电器的通断来实现举升和下降功能。把原车的电磁阀开关再并入一个继电器来控制电磁阀的开关。

图11 举升机构线控改装原理图
2.6 底盘电器控制
车身电器线控主要包括:灯光、喇叭、雨刮、熄火等电信号回路改装,实现灯光、喇叭、雨刮、熄火等车身电器设备控制。因为原车这些功能都是电信号控制的,所以只需要在原车电器开关按钮上分别并联继电器,再通过线控底盘控制器来控制继电器的通断就可以实现车身电器的线控。同时,线控底盘控制器通过CAN总线连接到原车车身总线上,将车辆底盘车速、油位等信息发送至智驾控制器的总线上供自动驾驶规划、决策及控制使用。无需更改原车控制协议,只需增加控制线路加装继电器来进行控制即可。
3 结论
本文基于某水泥矿山传统矿卡需要进行自动驾驶的需求,在不改变原车底盘系统的基础上,提出了一种针对传统矿卡进行线控改装升级的解决方案。首先介绍了自动驾驶矿卡的整体方案设计和系统组成。再次设计了自动驾驶矿卡转向系统、制动系统、油门、挡位、举升、电器的线控改装技术方案,实现了对方向盘控制,对制动系统的控制,对油门系统控制,对变速箱换挡的控制,对货斗举升和下降的控制,以及对灯光、雨刮、喇叭等电器的控制。本改装方案具有如下优势:
1)对原车改动很小,易于安装和实现。
2)可实现人工驾驶和自动驾驶的无缝切换。
3)应用车规级EPS、直线执行器、油门切换模块,保证系统的可靠和稳定性。
4)此方案适用于不同品牌、不同车型、不同吨位的矿卡改装,通用性好,便于大规模复制和推广。
猜你喜欢
汽车电器(2022年10期)2022-10-27
——以2017款东风雪铁龙DS6车为例
汽车维护与修理(2022年5期)2022-09-06
汽车实用技术(2022年10期)2022-06-09
汽车之友(2021年23期)2021-12-24
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
汽车之友(2015年22期)2015-09-10
汽车之友(2015年14期)2015-09-10
汽车之友(2015年12期)2015-09-10
企业技术开发·中旬刊(2014年7期)2014-09-23
世界汽车(2014年3期)2014-03-27