
自动浇花机器人的研制
2021-07-20 00:40吴立波宋文豪刘云帅
邯郸职业技术学院学报 2021年4期
吴立波 张 南 宋文豪 刘云帅
(邯郸职业技术学院 机电工程系,河北 邯郸 056005)
引言
随着生活质量的提高,越来越多的人们热衷于种植花卉。人们经常会因忙碌或出差等原因,不能及时给花卉浇水,影响花卉的生长,甚至使花卉枯死。为了将人们从繁琐的浇水工作中解放出来,真正享受花卉带来的舒适生活,小型精准浇花机器人的研发与推广势在必行。
1 国内外研究概况
当前机器人技术发展迅速,其应用逐步由工业、军事等领域向其他领域渗透,已经和日常生活息息相关。机器人正逐步代替人类完成一些相关工作,为人们解放出更多的时间和空间[1]。
随着美国机器人设计师克里斯·威利斯( Chris Willis)设计研制的“家庭主妇机器人”Valerie(瓦列丽)的问世,机器人技术突破了最终的瓶颈,进入了本该首先进入的人类的日常生活领域。Valerie 不仅仅是一个机器人产品,更重要的是在人的感官上产生了强烈的震撼。机器人已经越来越接近于人类,并逐步走进普通人的生活,实现了为人类服务。
20世纪70年代,随着人们生活水平的提高和生活节奏的加快而诞生了自动浇花系统。早在很多年前,国外就已经开始使用,但是其价格昂贵。以前我国使用的电子类自动浇花系统多数是从国外进口的,随着我国科技进步,自主研发出的自动化浇花系统,已广泛应用于花园、农场等地方。
随着电子技术的快速发展及生活水平的提高,生活质量备受关注,种养盆栽成为人们越来越喜欢的休闲项目。目前国内的自动浇花器的功能也在不断完善和发展,有关智能浇花器的专利也不在少数。同类型全自动盆栽浇灌器功能主要有:根据天气变化、光照与土壤干燥情况自动控制电源,将水及时定量地补充给花木,在某几个固定的时间浇花,手动和自动浇花模式选定。但是这些自动浇花设备不是存在大材小用、价格昂贵、可行性不高的问题,就是存在太过简单、功能不够完善的弊端,并不能真正解决盆栽的浇灌问题。
将机器人技术应用于自动浇花器上的研究很少,处于起步阶段。目前研究方向多为控制系统、仿生学和软件研究方面。如:西南科技大学信息工程学院张鹏的《基于LPC1768的智能浇花机器人设计》,提出了一种智能浇花机器人的硬件接口方案和软件设计思路;云南国土资源职业学院崔庆权的《多节点网络化智能盆栽浇花机器人的研究》,提出和设计了一种多节点网络化智能浇花机器人,实现了多盆栽的分布式浇花控制。浇花机器人将来的技术方向会更倾向于把家庭智能浇花器与物联网、WIFI无线通信技术、手机APP操作系统、仿生技术、传感器技术结合,所有浇灌动作都可以通过手机实时感知,无论你在何地,浇花过程都是透明并可控的。
本设计优势突出,设计理念超前,工作效果好,符合现阶段市场需求,极具市场推广价值。
2 花草自动浇灌需求分析
我国大气污染问题仍十分严重,在人们饱受了沙尘暴、雾霾和酸雨等恶劣天气之后,生存环境的改善问题刻不容缓,绿化造林、净化空气则是一种最有效的防治措施。同样,家庭空气质量的提高也可通过种植花卉得到有效改善。在家里种植花卉,首先可以有效分解室内有害物质,吸收装修残留甲醛,空气干燥时增加室内空气湿度。其次,花卉绚丽的色彩和美好的形态可以装扮室内空间,与追求“轻装修、重装饰”的现代装修理念不谋而合。上班族闲暇之余种植花草可以舒缓工作压力、陶冶情操,而中老年人种植花草则可以丰富、调节生活。另外,花卉不仅可用于观赏,还有很重要的经济、药用价值,并且在食品安全问题和“开心农场”游戏的影响下,越来越多的人们在家里种植花卉,甚至搭建阳台菜园[2]。
植物体内的水分占鲜重的 75%到 90%,不论是花草种植,还是农业灌溉,浇水是植物种植的关键,尤其是家庭种植的易存活的盆栽。上班族工作紧张,生活压力大,空闲时间较少,长期不在家时花草需要被照料。到底什么时候适宜给花草浇水,花草无人照料时怎么办等问题时常困扰着花卉养殖者。因此,为了满足主人在家享受田园劳作的乐趣,开发者开始着手研究庭院灌溉设备,这类产品在我国的市场属于成长期。
3 自动浇花机器人设计
3.1 系统总体结构设计
本设计实物图如图1所示,CAD结构图如图2所示。系统包含支撑板、背板、轴承板、步进电机、旋转直臂、同步带轮、轴承座、光轴、光轴固定器和本体支架。系统设定为壁挂式结构,工作时水箱和系统部件固定在墙壁上,需要浇灌的花卉摆放在机器人手臂下方的作业半径内。工作时,根据用户的设定,机器人“双关节”模拟人手臂动作,完成作业范围内的每个花盆的精准滴灌。

图1 实物图

图2 系统总体结构图
本设计采用的模块化设计以PLC为主控芯片,结合AD 转换电路、LCD 显示电路、键盘电路、水泵驱动电路等从而控制水泵进行自动浇花。本设计的系统组成框图如图3 所示。
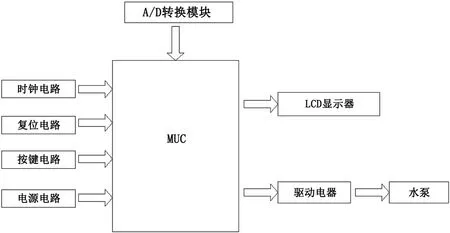
图3 系统组成框图
3.2 电路设计
220V电源线连接两台电源,分别是DC24V和DC12V,其中DC24V电源连接NC控制器,DC12V电源连接继电器。控制器分两路控制两个关节处的电机,电动机驱动手臂做X轴和Y轴的旋转,完成手臂浇花动作。同时,控制器中有定时器,与继电器一起控制水泵的启动与停止。电路图如图4所示。

图4 电路图
4.3 软件设计与仿真
对于整个系统,硬件是躯干,软件是灵魂,整个系统依照“自顶而下”的原则采用模块化设计,其中主程序的设计是整个硬件实现的关键,其主要实现的流程是:系统上电初始化之后,根据用户要求编制的程序,水泵启动进行浇花,待时间达到用户要求后,水泵停止浇水,如图5所示流程图。
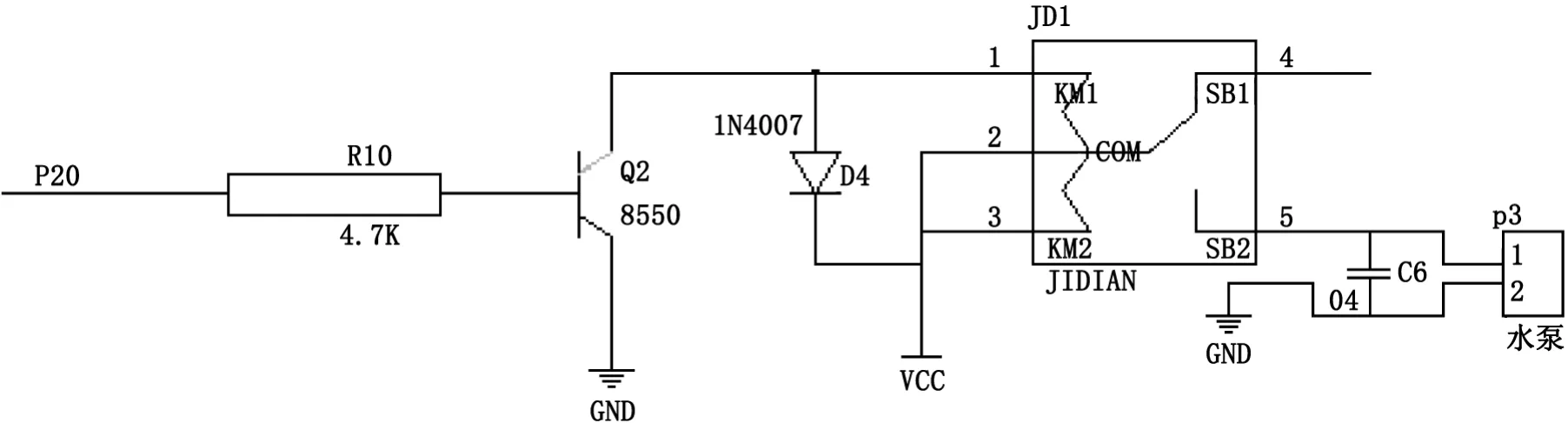
图5 水泵驱动电路原理图
3.4 对机器人实现浇花过程的外部结构设计
机器人在浇花的过程中,架子上的第一个伺服电机带动一侧手臂沿X轴运动,第二个伺服电机带动另一端手臂沿Y轴运动。在程序控制下,当喷头到达预定点位后,停止运动,进行滴灌;当设定时长结束,手臂继续运动,达到第二个定位点,再进行滴灌,直至作业范围内的全部定位点滴灌完毕。经测试,该系统定位100%准确,真正实现精准滴灌。手臂结构如图6所示。
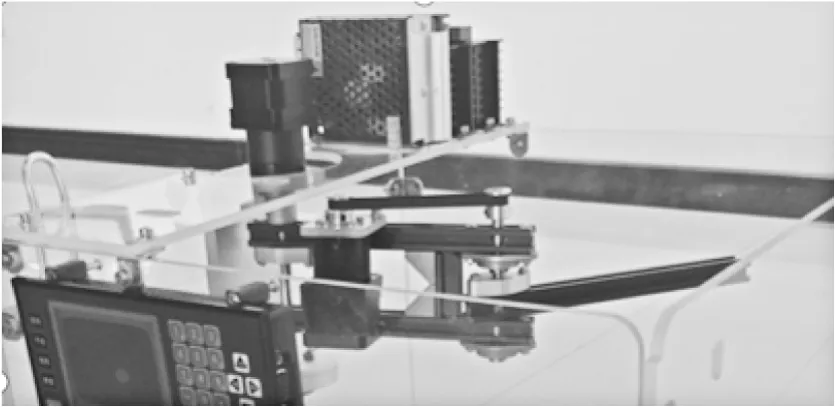
图6 双关节运动手臂
3.5 智能机器人自动浇花过程
机器人启动后,用户输入浇花时长、间隔时间和浇水量等参数。机器人根据用户要求按时启动水泵和手臂进行浇花,一个作业结束后进入待机状态,等待第二次浇花作业。动作过程如图7所示。
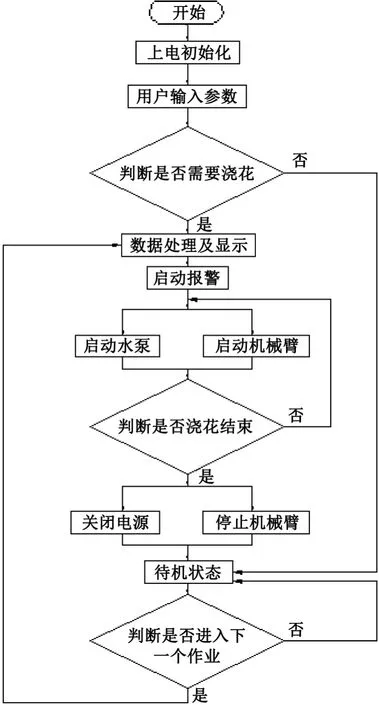
图7 浇花过程流程图
4 创新点
该机器人系统设计理念先进,系统扩展性好,操作简单,成本低廉,实用性强,总结创新点如下:
(1)动力系统、传动系统、执行系统和控制系统设计巧妙,体现美学、智能、力学、实用、耐用的设计理念;
(2)双关节运动系统模拟人类手臂动作,实现作业半径内指定位置的精准滴灌;
(3)控制系统为PLC编程式操作,可根据用户需要,智能定时浇花,且安全系数高,维护和使用方便;
(4)旋转机械臂、36减速器和小带轮等构件,明确、简单、安全可靠,大大提高浇花效率。
(5)壁挂式设计,节约空间,适用于家庭阳台、花卉市场等多种场所,市场效果好。
结论
本设计是一款基于PLC的自动浇花控制系统,其中PLC作为控制器,结合用户设定的程序对继电器通断进行自动控制,从而达到启动和停止水泵。重点在于双关节机械结构,可以模拟人类手臂动作,完成作业半径内指定位置的精准滴灌。经测试表明机器人运行稳定,可精准定位花盆位置,按需求浇水,具有很好的可操作性和可维护性,实现无人化管理,起到环保和节能的作用。
猜你喜欢
今日农业(2020年14期)2020-12-14
童话世界(2020年8期)2020-06-15
红领巾·探索(2020年3期)2020-05-19
小天使·一年级语数英综合(2019年4期)2019-10-06
小学生优秀作文(低年级)(2018年3期)2018-08-15
Coco薇(2017年5期)2017-06-05
琴童(2016年7期)2016-05-14
少儿科学周刊·少年版(2015年4期)2015-07-07
娃娃画报(2009年11期)2009-12-07
母婴世界(2009年11期)2009-12-02
