
基于边缘检测的槽罐车焊缝提取方法
2021-08-26 13:31吴建聪魏昕王颢汪永超蒙禹舟
电焊机 2021年7期
关键词:边缘检测
吴建聪 魏昕 王颢 汪永超 蒙禹舟


摘要:针对槽罐车内壁焊缝背景影响缺陷分割的问题,提出一种基于边缘检测的方法提取出焊缝区域。对槽罐车内壁图像进行灰度化、高斯滤波去噪等预处理;用Canny算子获取到焊缝的边缘细节,采用一系列形态学处理方法把焊缝边缘连接成一个区域,并用最大面积法去除周围噪声,初步提取到焊缝区域;求焊缝区域的最小外接矩形,将最小外接矩形的四个顶点坐标用到槽罐车焊缝原图像,提取出完整的焊缝区域;采用“ 旋转法 ”解决倾斜焊缝的提取问题。
关键词:槽罐车;边缘检测;焊缝提取;最小外接矩形
中图分类号:TG409 文献标志码:A 文章编号:1001-2003(2021)07-0093-06
DOI:10.7512/j.issn.1001-2303.2021.07.18
0 前言
槽罐車是一种用来装汽油、甲苯、硫酸、液氨等危险化学品的常压金属罐车。在长期的使用下,槽罐车的罐体会留下安全隐患:一是因为罐体金属内壁会被所运输的特殊介质腐蚀;二是因为槽罐车在行驶过程中罐内介质不断冲击罐体,罐内细小缺陷被逐渐放大。因此,槽罐车投入使用后必须进行定期检验。槽罐车定期检验需要对槽罐车内壁进行外观检查,通常由工作人员进罐检验。按照检验流程,在工作人员进罐检验之前要先对罐体进行清洗,清洗后罐内介质气体浓度达到一定标准方可进罐。目前,槽罐车罐体清洗需要先对槽罐车进行蒸汽蒸罐处理,再由清洗人员进罐清洗[1]。蒸汽蒸罐不仅耗时长,排放的汽体还会污染环境。人工清洗不仅对清洗人员的身体健康造成影响,操作不当极易发生安全事故。
为补充甚至取代人工检测槽罐车缺陷,可采用机器视觉的方法获取槽罐车内部图像,通过分析图像来识别缺陷。由文献[2]可知,槽罐车内部缺陷主要在防波板与罐体的焊接处,原因是焊接处应力集中,被不断冲击后,焊缝处的细小缺陷容易扩展。因此,槽罐车缺陷检测的重点是罐内焊缝处。为降低焊缝图像的背景区域对缺陷提取的影响,文中将焊缝从焊缝图像中提取出来,方便后续的缺陷提取。
一些学者已对焊缝提取进行了研究。沈祯杰[3]通过平均灰度值选择法获取金属罐焊缝的水平中心大概位置,并以此位置往两边扩展一定距离初步提取焊缝,通过求焊缝的质心位置确定焊缝的核心区域。此方法只适用于与背景灰度值差异明显的焊缝。何银水等人[4]以图像的亮度信息和方向信息作为初级视觉特征, 通过阈值分割和最近邻域聚类提取激光焊焊缝轮廓信息。阈值分割比较适用于分割出激光焊中黑暗背景下白色的焊缝。刘端飞[5]通过边缘检测提取焊缝边缘,并采用连接、膨胀、细化等方法获取到单一的焊缝图像。此方法难以适应高噪声的焊缝图像。文中将针对槽罐车焊缝的低对比度、高噪声问题,提出一种基于边缘检测槽罐车焊缝提取方法。
1 焊缝图像预处理
通过检测平台获取的槽罐车内壁图像为带噪声的彩色图像,采用图像灰度化和图像去噪对原图像进行预处理,便于后续图像处理。
1.1 图像灰度化
本文获取到的槽罐车内壁图像为彩色图像。槽罐车内壁为金属表面,彩色图像与灰度图像视觉差别不大,但彩色图像相对于灰度图像会大大增加图像处理的计算量与难度。因此,需要将原图像进行灰度化处理,将彩色图像转化为灰度图像。
对槽罐车罐壁图像灰度化处理,结果如图1所示,可以看出灰度图对原图改变不大,只失去原图的少量信息。
1.2 图像去噪
图像噪声是指图像中妨碍观察的一些不必要的数据信息,图像噪声会影响完整焊缝的提取。
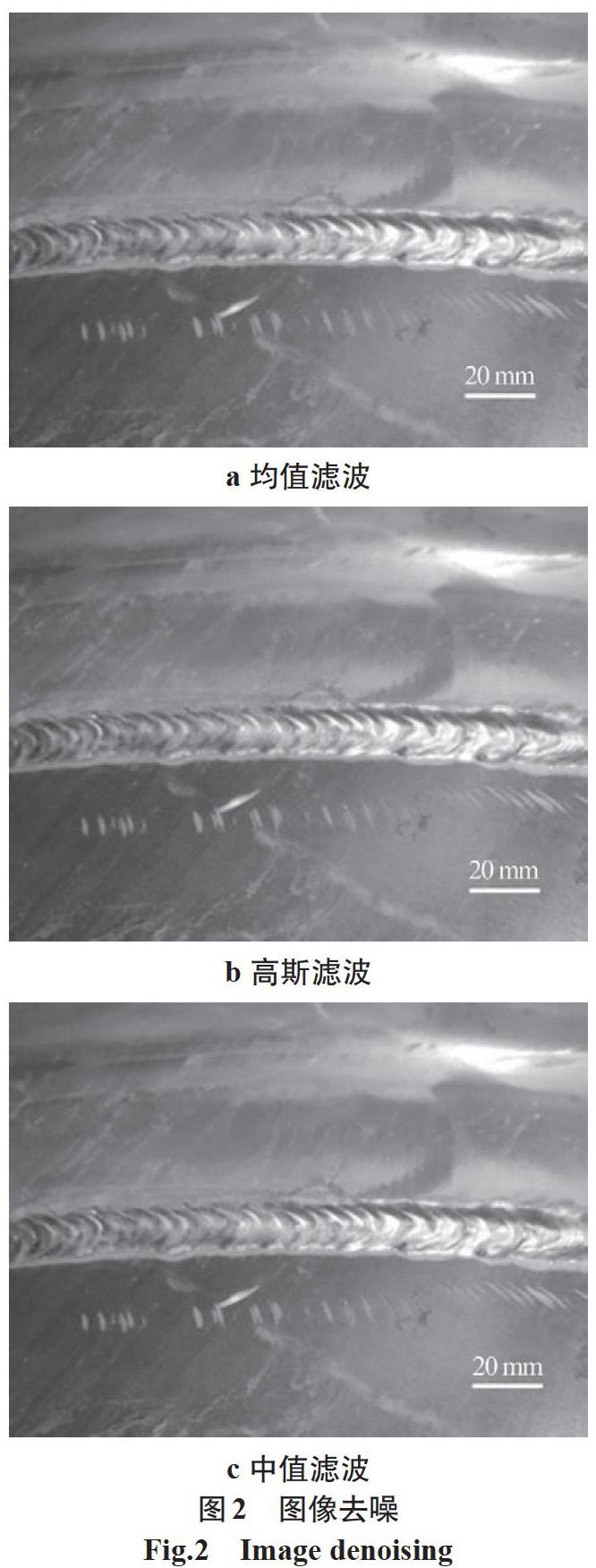
目前常用的去除噪声方法包括均值滤波、高斯滤波和中值滤波[6]。分别采用这三种方法对图1b进行图像去噪,各滤波方法的去噪结果如图2所示。
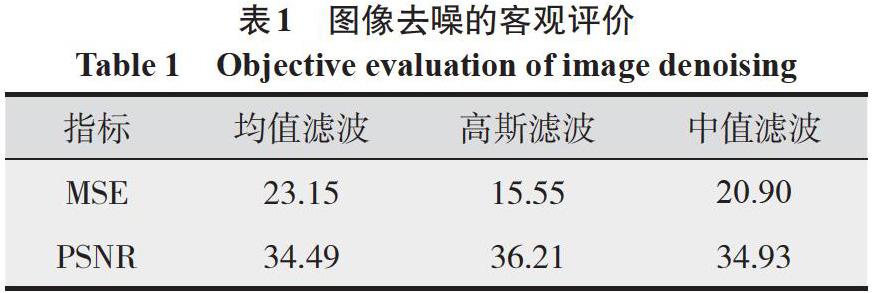
由于图像噪声较少,图像去噪的效果难以用主观视觉分辨。因此,采用客观评价方法来评价去噪效果。客观评价指标通常包括均方误差MSE和峰值信噪比PSNR[7],MSE值越小或PSNR值越大,表示去噪效果越好。计算图2中3张图像的MSE和 PSNR值,结果如表1所示。由表1可知,高斯滤波去噪方法的MSE值最小,PSNR值最大,在这三种去噪方法中去噪效果最好。
2 边缘检测及形态学处理
2.1 焊缝图像阈值分割
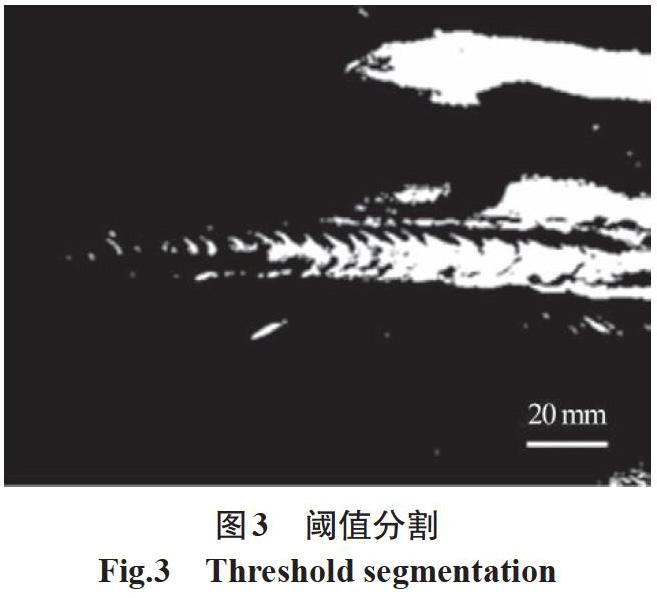
为了将焊缝提取出来,首先采用阈值分割方法。阈值分割的原理是选定一个将图像区域分开的阈值T,当图像中的灰度值大于T,则令灰度值为1;当图像中的灰度值小于T,则令灰度值为0。对图2b进行阈值分割,结果如图3所示。
由图3可知,阈值分割难以提取出槽罐车图像中的焊缝区域,并且焊缝区域周围还存在大量噪声。阈值分割无法提取出焊缝的原因有两个:一是因为光线在金属罐壁上发生反射,产生光照不均;二是焊缝与非焊缝区域都为金属材质,两者的灰度值相差不大。
2.2 焊缝图像边缘检测
槽罐车焊缝图像具有焊缝区域纹理细节较多而非焊缝区域光滑的特点。针对该特点,选择边缘检测的方法分别提取焊缝。图像的边缘细节在像素的体现就是边缘两端的像素灰度值相差较大,也就是灰度值发生突变。边缘检测就是利用数学里的梯度工具检测灰度突变的位置及程度,以此提取出边缘细节[8]。
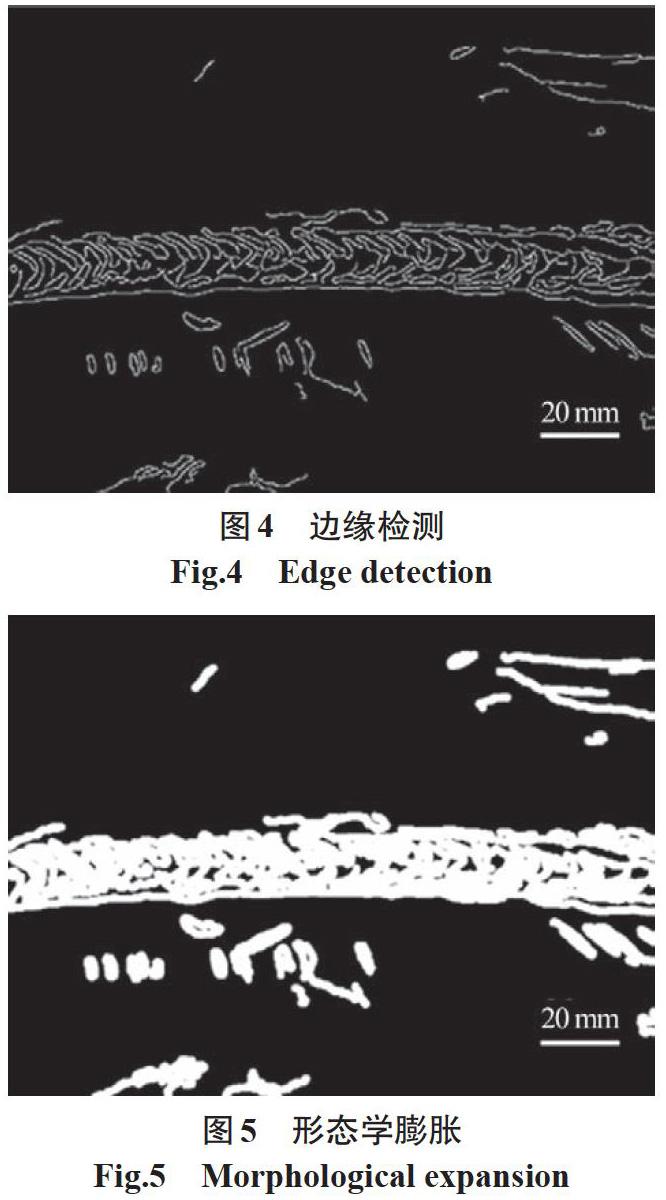
选择优秀的Canny算子[9]对图2b进行边缘检测,获取图像中焊缝的边缘细节,边缘检测结果如图4所示。
2.3 形态学膨胀
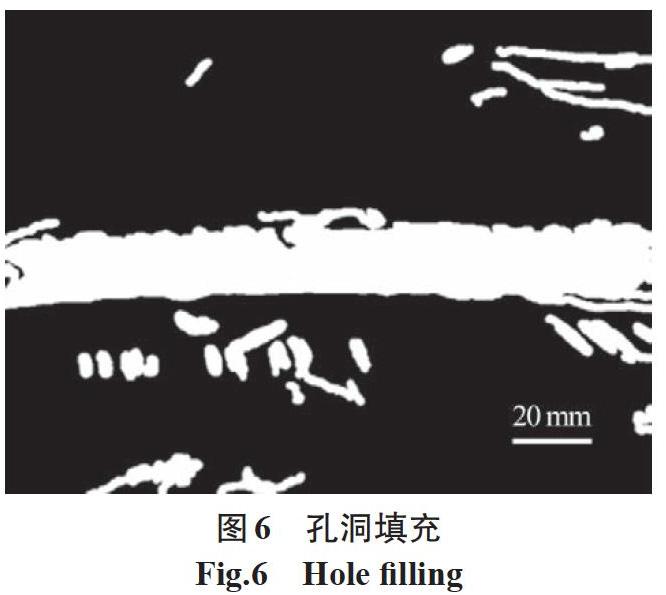
由图4可知,边缘细节没有连接在一起形成一个区域,而且焊缝边缘周围存在一些噪声。采用形态学膨胀和形态学腐蚀方法将焊缝边缘连接成一个区域,形态学膨胀的作用就是放大图像中的像素,扩大图像中区域的范围。对图4进行形态学膨胀操作,结果如图5所示。
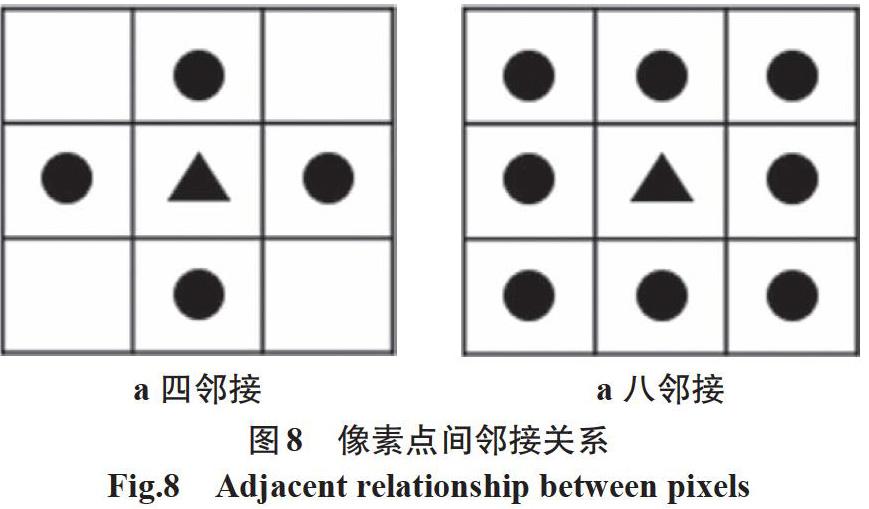
由图5可知,白色的焊缝区域内存在一些黑色孔洞。扩大形态学膨胀的范围固然可以封闭一些孔洞,但同时也会放大焊缝周围的噪声甚至与焊缝区域连接在一起。采用基于集合膨胀、求补和交集的算法[10],对图5进行孔洞填充处理,结果如图6所示。
2.4 形态学腐蚀
由图6可以看出焊缝的孔洞基本被填满,焊缝区域基本显示出来。但是由于图像经过膨胀,所以得到的焊缝区域要比原图更大。采用形态学腐蚀方法缩小焊缝区域至原图大小。
对图6进行形态学膨胀处理,结果如图7所示,焊缝区域明显缩小,与原图焊缝区域相符。
3 选取最大面积区域
由图7可知,焊缝区域周围还有许多噪声。为了将焊缝区域单独提取出来,必须去除周围的噪声。由于主要检测对象是焊缝,拍摄的图像主要就是边缘细节较多的焊缝区域和边缘细节较少的罐壁背景区域。因此,焊缝区域一般都是边缘检测处理后面积最大的区域。将图像中各区域分隔开来,选取面积最大的区域,即提取出焊缝区域。
3.1 分隔区域
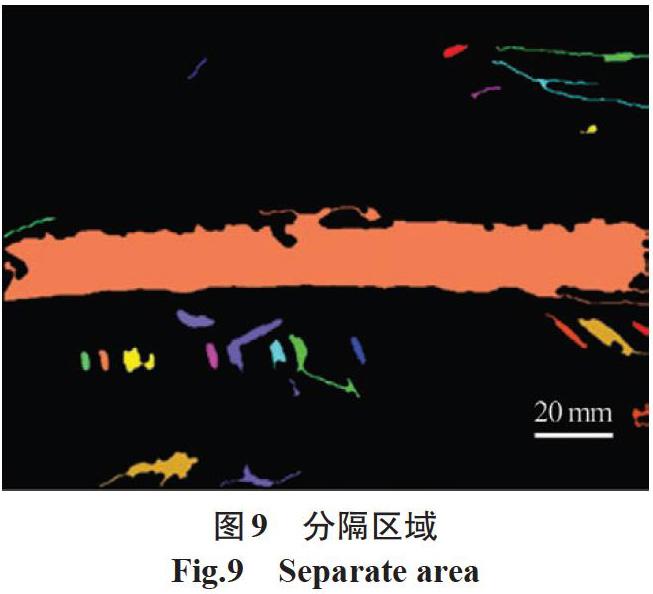
在图像中,每一个像素的相鄰像素是4个,包括对角线方向的像素则有8个,这种关系称为四邻接和八邻接。如图8所示,黑色三角形为中心像素,黑色圆圈为中心像素的邻接像素。
如果像素点间相互是邻接关系,则称像素点之间是连通的。如果像素点M与N连通,像素点N与P连通,则称M与P也连通。在视觉上看来,同一个区域的像素点之间是连通的。因此,可以通过判断像素点间是否连通的方法来分隔各个区域。文中通过八邻接来判断像素点之间是否连通,从而将图像分成不同的区域。对图7进行区域分隔,结果如图9所示,不同的区域间用不同的颜色区分。
3.2 计算区域像素值
由于焊缝区域为各区域中面积最大的区域,为去除噪声,只选取最大面积区域。计算各区域中的像素点的个数作为各区域的面积之值,选取其中面积值最大的区域,即可提取出焊缝区域。选取图9中面积最大的区域,结果如图10所示。可以看出,只有焊缝区域部分被提取出来,去除了周围所有的噪声。
4 焊缝提取
由图10可知,图中白色焊缝区域形状不规则,不能包含完整的焊缝。本节的目的是通过求出包含焊缝区域的最小外接矩形来提取焊缝。
4.1 最小外接矩形
某个二维图像的最小外接矩形是指在二维坐标系中能够包含该二维图像的边与坐标轴平行的矩形。二维图像的最小矩形求取步骤如下:
(1)将图像转化为矩阵后,按行方向查找,找到第一次出现像素点的位置,记为A点。找到最后一次出现像素点的位置,记为C点。
(2)按列方向查找,第一次出现像素点的位置,记为B点。找到最后一次出现像素点的位置,记为D点。
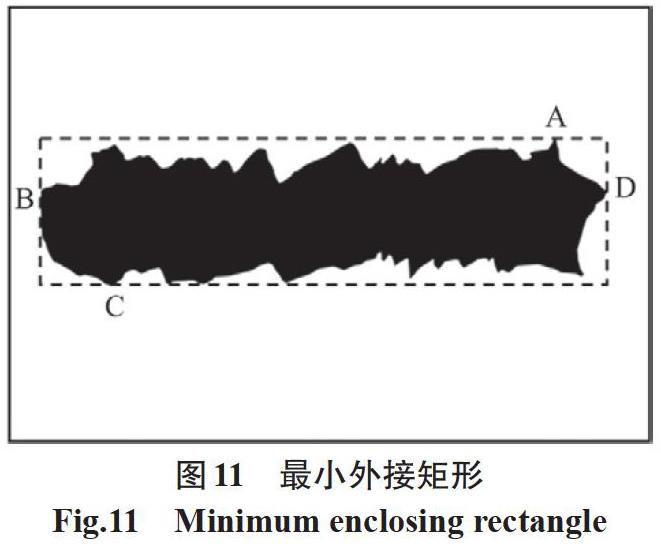
(3)过A点和C点分别画一条平行于行方向的直线,过B点和D点分别画一条平行于列方向的直线。这4条直线的4个交点便是该二维图像的最小外接矩形的4个顶点,由此得到最小外接矩形,如图11所示。
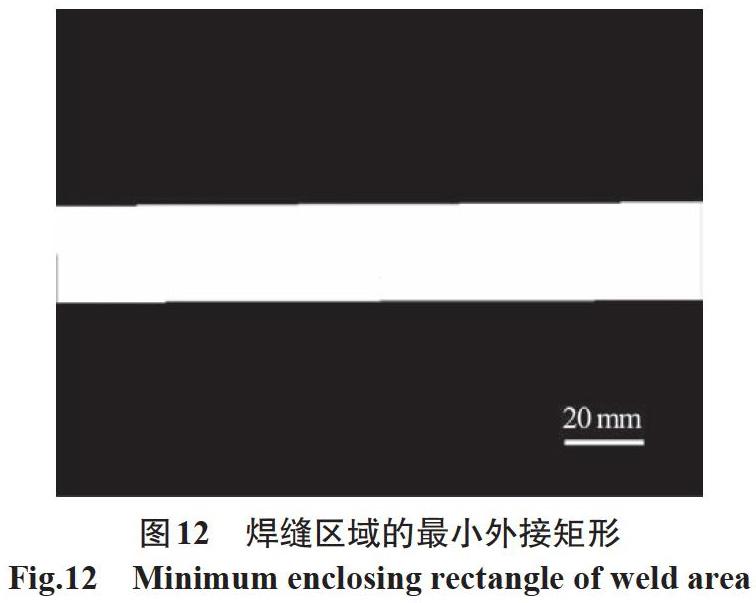
图11中的A、C点分别为行方向上第一次和最后一次出现像素点的位置,B、D点分别是列方向上第一次和最后一次出现像素点的位置。图中的虚线矩形便是图中黑色区域的最小外接矩。求图10焊缝区域的最小外接矩形,结果如图12所示。
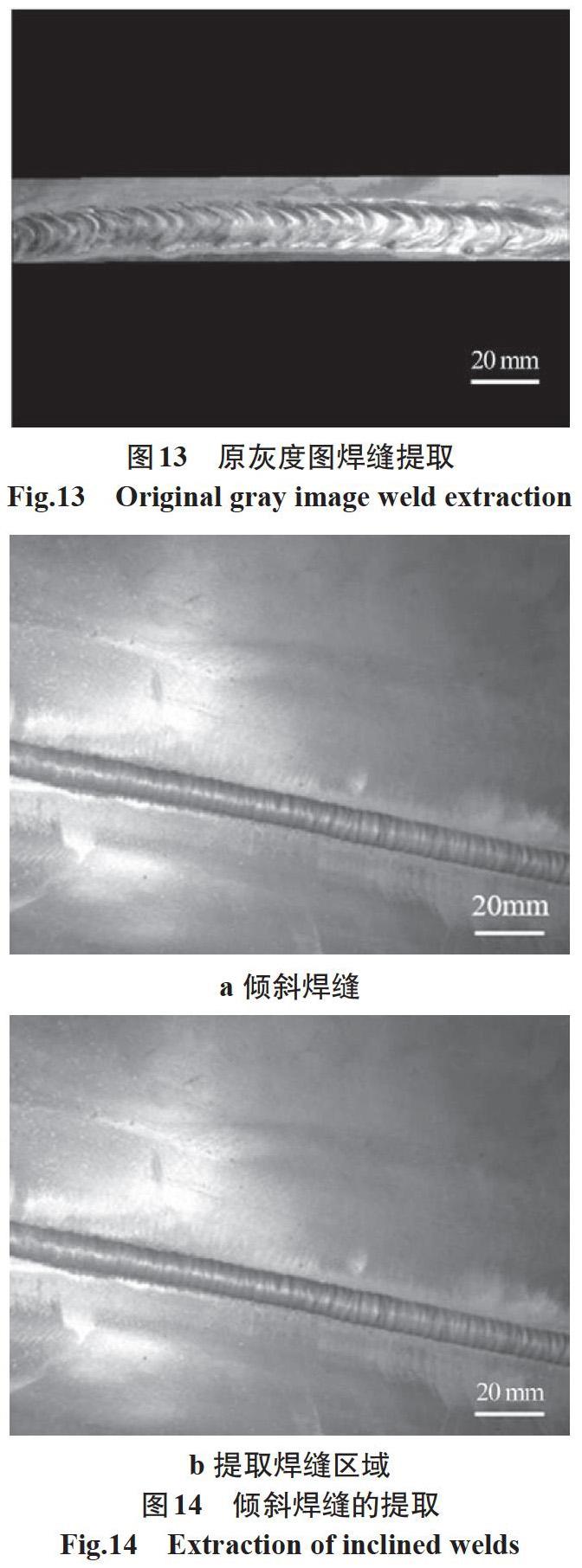
记录图12中白色焊缝区域的4个顶点坐标位置,按坐标提取图1b中对应的最小外接矩形z位置,便提取到了焊缝,如图 13所示。
4.2 最小面积外接矩形
图13显示提取出了完整的焊缝区域,减少了大量的背景区域,效果良好。但是,如果图像中的焊缝区域有所倾斜,得到的焊缝区域便会包含大量的背景。图14a是倾斜焊缝,图14b是通过获取最小外接矩形得到的焊缝区域,可以看出图14b包含了大量的背景。
为解决倾斜焊缝提取的背景区域过大问题,采取“ 旋转法 ”[11]来提取倾斜焊缝区域。在经过最大面积选择,获取到基本的焊缝区域的情况下,“ 旋转法 ”的操作步骤如下:
(1)以图像的中心点为旋转中心,将图像旋转一个小角度α=180°/k(k为整数),求旋转后焊缝区域的最小外接矩形。计算外接矩形的像素点个数作为此外接矩形的面积,并记下相对应的旋转角度。
(2)在(1)的基础下重复步骤(1),以此类推,直到图像被旋转180°为止。
(3)将以上每次旋转后的最小外接矩形的面积从小到大进行排列,选择最小面积的最小外接矩形。此最小外接矩形对应的便是倾斜焊缝区域包含背景最少的位置。
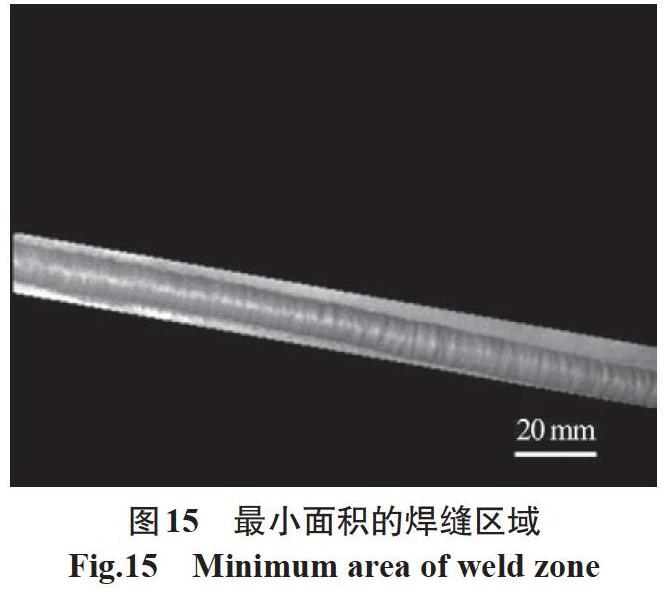
对图14a进行预处理后用“ 旋转法 ”获取最小面积的最小外接矩形并提取对应焊缝区域,结果如图15所示。
5 结论
(1)对图像灰度化处理,采用均值滤波、高斯滤波、中值滤波方法对灰度图像去噪,其中高斯滤波的去噪客观评价最高。
(2)采用Canny算子获取到焊缝边缘细节,并通过形态学膨胀、孔洞填充、形态学腐蚀方法将焊缝边缘连成区域。
(3)分隔图像区域,选取区域中的最大面积区域达到去除其他噪声的效果,初步提取到焊缝。
(4)通过求最小外接矩形方法的进一步获取到完整焊缝。采用“ 旋转法 ”提取到倾斜焊缝图像的焊缝,基本不包含非焊缝区域。
参考文献:
严敏,钟勇,昝军,等.危险化学品运输槽罐车清洗技术研究与应用[J].工业安全与环保,2019,45(7):40-43,101.
张军,李惠意,阎石,等.浅谈危险品常压罐车检验中常见缺陷及其成因[J].广州化工,2013,41(3):128-129,147.
沈祯杰. 基于机器视觉的金属制罐焊缝缺陷检测系统研究[D].江苏:江南大学,2014.
何银水,孔萌,陈华斌,等.基于视觉注意机制的机器人厚板焊接焊缝轮廓的识别[J].焊接学报,2015,36(12):51-55,115.
刘端飞. 基于机器视觉的不锈钢箱体的焊缝识别与跟踪研究[D].山东:青岛科技大学,2019.
常宁赫. 非局部均值滤波去除图像高斯噪声的研究[D].陕西:西安电子科技大学,2015.
杨光义. 图像质量评价及其在图像去噪中的应用研究[D].湖北:武汉大学,2018.
Saket Bhardwaj,Ajay Mittal. A Survey on Various Edge Detector Techniques[J]. Procedia Technology,2012(4):220-226.
吕彦诚. 图像边缘检测及模式识别技术研究[D].黑龙江:哈尔滨工业大学,2019.
冈萨雷斯.数字图像处理(第三版)[M].阮秋琦,等,译.北京:电子工业出版社,2011.
基于机器视觉的纸尿裤缺陷检测研究[D].福建:华侨大学,2020.
猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年9期)2016-04-26
科技视界(2016年3期)2016-02-26
