机器人辅助腹腔镜技术应用于儿童肾上腺肿物切除术的初步经验
2021-09-02 00:55周辉霞马立飞周晓光曹华林
临床小儿外科杂志 2021年8期
赵 扬 周辉霞 马立飞 周晓光 陶 天 曹华林 李 品
儿童肾上腺肿物发病率低,主要见于5岁以下儿童,女童发病率略高于男童。肾上腺位于腹膜后,解剖位置深,儿童腹腔操作空间小,肿物视野暴露困难,因而既往该部位的肿物切除以开放手术为主,但存在手术创伤大、恢复时间长、术后并发症多等缺点。1996年,Yamamoto等[1]首次采用腹腔镜技术进行肾上腺肿物切除术治疗小儿神经母细胞瘤,证实微创技术在儿童肾上腺肿物切除术中有一定可行性。
机器人手术系统具有逼真的三维视野、灵活稳定的操作系统,自应用于临床以来,被医务人员持续关注,目前该技术已经广泛应用于成人肾上腺肿物切除术[2]。但机器人手术系统在儿童肾上腺肿物切除术中的应用尚处于起步阶段,检索国内外文献能够查到的病例较少。本研究以解放军总医院第七医学中心儿童泌尿外科10例接受机器人辅助腹腔镜肾上腺肿物切除术的患者作为研究对象,介绍该技术操作方式,总结应用经验,并初步探讨该技术用于儿童肾上腺肿物切除术的安全性和可行性。
材料与方法
一、临床资料
回顾性分析2017年6月至2019年6月解放军总医院第七医学中心儿童泌尿外科10例采用机器人辅助腹腔镜技术完成肾上腺肿物切除术患者的临床资料,其中男4例,女6例。年龄1~96个月,平均年龄37.9个月。双侧肾上腺肿物1例,右侧肾上腺肿物7例,左侧肾上腺肿物2例,见表1。通过临床表现及产前检查发现1例,因脐周或上腹疼痛发现4例,无症状超声探查发现5例。所有患者术前经腹部增强CT或增强MRI证实为肾上腺占位,不存在基于影像学定义的危险因子(image-defined risk factors,IDRFs),典型病例如图1。

表1 10例机器人辅助腹腔镜儿童肾上腺肿物切除术患者病例资料Table 1 Clinical data of 10 cases of robot-assisted laparoscopic adrenal mass resection in children
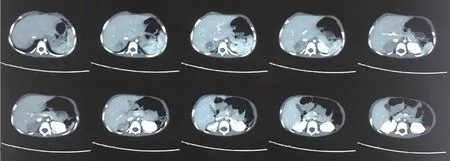
图1 儿童肾上腺肿物增强CT图 注 病例5,男,4月龄,右侧肾上腺区肿物位于肝肾之间、右肾动脉右上方,边界尚清,密度不均匀,内见多发小片状致密影,未包绕腹膜后大血管,与周围脏器分界尚清,无IDRFsFig.1 Contrast-enhanced CT image of adrenal mass in a child
二、手术方法
(一)术前准备
1.麻醉方式及体位:采用气管插管全身静脉复合麻醉,建立中心静脉置管。取健侧斜卧位70°~90°,抬高腰桥,双下肢下曲上伸。留置F6~F16(根据患者年龄选择)双腔导尿管。
2.孔道置放:在脐环下置入8.5 mm镜头孔,并在剑突下及耻骨联合上腹横纹处分别置入一个5 mm和一个8 mm Trocar,分别置入单极电剪或电钩(1号臂)、双极马里兰电凝镊子(2号臂)。两个操作通道距镜头孔的距离基本相等。辅助孔操作通道置于下腹部健侧腹横纹上距正中线约3 cm处,以便于助手进行牵拉、钳夹、吸引、冲洗等辅助操作。必要时可于上腹部健侧腹横纹上距正中线约3 cm处置入第二个辅助孔[3],见图2。

图2 操作孔置放体表标识 注 C:镜头孔操作通道;1:1号机械臂操作通道;2:2号机械臂操作通道;A:辅助孔操作通道;P:气腹管与辅助孔连接;O:术中使用电切或电凝时将镜头操作通道侧孔打开,释放烟雾Fig.2 Intraoperative layout of Trocar
(二)手术步骤
1.显露肾周筋膜:暴露术野,辨认肝脾、结肠肝脾曲及升结肠、降结肠等器官,先探查腹腔确定是否存在妨碍手术的粘连或其他异常,如存在粘连,需先分离。沿结肠旁沟切开侧腹膜,切断肝(脾)结肠韧带,将右(左)半结肠及上段升(降)结肠翻向下。
2.暴露肾上腺:助手于辅助孔内将肝脏(脾脏)向横膈方向挡开,充分游离肾脏。显露肾上腺时,可采用辅助套管或者体表牵引线悬吊切开的腹膜,将肝脏或脾脏向头端牵引。对于右侧肾上腺肿物的切除,可于体表牵引线悬吊肝圆韧带,使肝脏下缘向上牵拉,充分暴露手术视野。切开肾上极内侧的肾筋膜和脂肪囊,从中找到金黄色的肾上腺,并向下暴露肾蒂。切除左侧肾上腺肿物时,可先找到左侧肾静脉,沿左侧肾静脉上方找到左侧肾上腺中央静脉,继而找到左侧肾上腺。
3.肾上腺或肿物的切除:先分离出中央静脉,在肾上腺中央静脉的下腔静脉(肾静脉)端用2个Hem-o-lock夹闭、肾上腺端用1个Hem-o-lock夹闭,后从中剪断,并由此开始游离。肾上腺动脉数量多且细小,单极电剪可有效控制出血,一般不需要使用Hem-o-lock。先处理上方来自膈下动脉的分支,再向下切断肾上腺中动脉和来自肾动脉的肾上腺下动脉,手术中应注意勿损伤肾蒂。游离内侧缘后将覆盖在肾上腺表面的肾周脂肪囊提起,切开肾上腺和肾上极之间的肾筋膜和脂肪,此处有一些来自肾包膜和周围脂肪的小血管。肾上极外侧缘基本无血管,游离后将整个肾上腺切除。如肿物位于内侧支、外侧支或肾上腺尖部,则可行腺瘤及肾上腺部分切除术,找到肿物后,于肿物的上、下缘和前、后表面以单极电剪或电凝钩进行分离,对与肿物连接的肾上腺组织可用单极电剪或双极电凝凝固后切断,也可用Hem-o-lock夹闭后剪断,见图3。

图3 儿童肾上腺肿物切除过程图 注 1:体表牵引线悬吊肝圆韧带辅助暴露术野;2:肾上腺肿瘤切除后保留的部分肾上腺;3:肿瘤切除后观察腺窝处出血情况;4:Hem-olock夹闭肾上腺中央静脉断端Fig.3 Robotic laparoscopic adrenal mass resection in children
4.创面止血:降低气腹压力至3~5 mmHg,检查手术视野特别是肾上腺窝处有无活动性出血。如有出血可根据情况用双极电凝、钛夹或Hem-olock等处理,并应用止血粉或其他止血装置再次进行瘤床止血。
5.标本取出、移走机器人手术系统:先将切下的肾上腺及肿物装入标本袋,撤走机器人设备,于下腹部行潘氏切口,直视下取出标本袋,避免标本袋破损。再次检查术区有无活动性出血,清点纱布、器械无误后,于术区置一负压吸引引流管,自辅助孔引出。移去镜头,松开机械臂与Trocar连接,移走床旁机械臂手术系统。缝合各切口,结束手术。
结 果
10例均采用机器人辅助腹腔镜技术经腹腔行肾上腺肿物切除术,术中均无中转开放手术病例。平均腹腔内操作时间145.2 min(97~220 min),平均出血量22 mL(10~30 mL),肿物最大直径平均4.7 cm(3~8 cm),平均重量38.3 g(5~76 g),术后病理结果:双侧肾上腺囊肿1例,肾上腺成熟畸胎瘤3例,节细胞神经母细胞瘤3例,神经节细胞瘤3例。术后2例转至儿童血液肿瘤科化疗。术后平均进食时间3.8 d(3~7 d),术后平均引流管留置时间6 d(3~15 d)。1例术后发热10 d,超声检查提示肝肾间隙积液。术后平均7 d(4~20 d)出院,出院后平均随访12.5个月(6~20个月),无一例肿瘤复发。
讨 论
本中心以成人机器人辅助腹腔镜肾上腺肿物切除术为参考,结合儿童肾上腺肿物解剖学及生理学特点,于国内较早开展了机器人辅助腹腔镜儿童肾上腺肿物切除术。现结合10例患者的病例特点及手术过程,从以下三个方面进行讨论。
一、手术适应证与禁忌证
成人机器人辅助腹腔镜肾上腺肿物切除术的适应证或者禁忌证基本与常规腹腔镜手术相似[4]。其绝对禁忌证包括侵犯邻近结构直径较大的肾上腺皮质癌,存在转移的嗜铬细胞瘤,严重心肺疾病及出血倾向等。相对禁忌证主要包括肿物过大,肾上腺恶性肿物和既往有腹腔手术史、存在广泛粘连可能的患者。
与成人不同,儿童肾上腺肿物以神经源性肿瘤为主,因而上述成人手术适应证用于儿童存在一定局限性,但绝对禁忌证中的肾上腺肿物侵犯临近结构和肿物存在远处转移同样适用于儿童。故肿物是否侵犯临近结构是能否进行手术治疗的关键。关于术前评估,儿童肾上腺肿瘤的手术时机可以参考2009年发布的国际神经母细胞瘤危险度分组系统(International Neuroblastoma Risk Group Staging System,INRGSS)。该系统推荐以术前是否存在IDRFs作为能否进行手术的首要参考指标[5]。IDRFs中与肾上腺肿物相关的主要有腹膜后重要血管包绕以及周围脏器侵犯两个方面的危险因素。运用增强CT三维重建技术可以立体显露重要解剖标记与肿瘤的关系,对于评估是否存在IDRFs具有重要的参考价值[6]。Günther等[7]报道,当存在IDRFs中的危险因素时,仅26%的患者可完整切除肿物[4]。因此,当IDRFs≥1项时,应避免进行机器人辅助腹腔镜肾上腺肿物切除术。
关于肿物体积对微创手术的影响。Kelleher[8]发现,当肾上腺神经母细胞瘤直径<5 cm,且没有血管包绕时,微创手术可以达到与传统开放手术相同的诊疗效果。Vereczkei等[9]报道,肿瘤直径>6 cm,瘤体血供丰富,与周围组织粘连,分离切除难度大者,不适合腹腔镜下手术。但是机器人辅助腹腔镜技术操作更加灵活、精准,越来越多的研究指出即使肾上腺肿块直径>6 cm,采用该技术行儿童肾上腺肿物切除也是安全可行的[10]。本研究中切除的肾上腺肿物最大直径为8 cm。因此,肾上腺肿物最大直径是否作为手术禁忌证尚存在争议,笔者认为如果肿物直径>5 cm,但是不存在IDRFs,仍然可以采用机器人辅助腹腔镜技术切除肾上腺肿物。
二、手术技巧
1.Trocar位置:由于小儿腹腔容积较小,限制了手术操作的空间,各个机械臂之间在操作时也难免发生碰撞,从而不同程度地限制了机械臂的灵活度。机器人手术系统推荐每个Trocar之间保持8 cm的安全距离,但对于儿童(尤其是婴幼儿),此安全距离难以实现。因此本中心对Trocar位置进行了改进,在脐缘放置8.5 mm的镜头Trocar,剑突下置入5 mm Trocar,耻骨联合上置入8mm Trocar。实践发现两机械臂间距≥6 cm就能有效避免机械臂之间的碰撞,可顺利完成手术[3]。
2.牵引线的应用:肾上腺手术需要切开侧腹膜,充分暴露肾上腺血管、下腔静脉等重要解剖结构,切开侧腹膜后,由于肠管蠕动,常常会遮挡手术视野,导致操作不便,尤其是在止血、分离血管等操作时,肠管的遮挡会增加安全隐患。因此,术中侧腹膜切开后,对其切缘进行体外牵引,可以防止降结肠或升结肠遮挡术区。对于右侧肾上腺肿物切除,可以通过体表牵引线或辅助套管悬吊肝圆韧带,使肝脏下缘向上牵拉,从而充分暴露手术视野,并可有效避免机器人机械臂与辅助器械之间相互碰撞[11]。
三、技术优势
肾上腺解剖位置深,儿童腹腔操作空间小,手术难度大,手术时间长,出血量较多,致使儿童肾上腺手术在很长一段时间内以传统开放手术为主。开放手术一般采取腹部长横切口(10~15 cm),创伤较大,患者术后恢复慢。随着微创技术的发展,腹腔镜技术已经越来越多地应用于儿童肾上腺肿瘤切除术。目前最常用的腹腔镜肾上腺手术路径有经腹腔和腹膜后两种。经腹腔入路操作空间大,暴露充分,解剖标志明确,但相应的解剖路径长,要分离组织多,会影响腹腔脏器;经腹膜后入路操作空间较小,解剖标志辨认困难,但对腹腔脏器扰动小。成人腹腔镜肾上腺肿物切除术以腹膜后入路为主,与成人不同,儿童腹膜后解剖空间小,解剖标志不明显,腹膜较薄容易破裂,因而对儿童病例主要选择经腹腔入路。常规腹腔镜手术使用的操作器械自由度小,在狭小空间进行精密操作的难度大,故手术时间较长。而机器人辅助腹腔镜技术具备6个关节7个自由度的灵活机械臂,保证了器械在狭小空间进行精细操作,这是常规腹腔镜手术无法实现的[12]。
在处理术野暴露相对困难的右侧肾上腺肿物及肿瘤与腹膜后深层组织粘连时,机器人辅助腹腔镜的技术优势也较明显。右侧肾上腺被肝脏下缘遮挡,而膈肌角及腰大肌解剖层次较深,术野暴露通常较困难,操作空间受限。常规腹腔镜器械活动度受限,越过肝下缘进行肾上腺肿物滋养血管游离的难度较大,手术时间较长,第一肝门损伤的风险也增加。当需要进行血管修补时,传统腹腔镜器械的操作受限将更加明显。当肿瘤与膈肌角或腰大肌粘连明显时,视野受限容易造成肿瘤被膜破裂引起肿瘤残留或扩散。机器人辅助腹腔镜技术具有三维视野,可将视野放大10~15倍,能清晰地辨别出肿瘤的血管分布走形,而机械臂灵活的腕力作用,可以精准地对肿瘤及血管进行解剖、剥离及缝合,不用担心因视野及操作受限而误伤血管或导致肿瘤残留[13]。肿物切除后及时将标本置入取物袋中,可大大降低肿瘤种植性转移的风险。
此外,小儿腹腔容积小、腹膜吸收快、对缺氧的耐受差,气腹压力对患者影响较大。传统腹腔镜手术在行儿童肾上腺肿物切除术时,需将气腹压力控制在8~12 mmHg,而机器人辅助腹腔镜手术时由于机械臂的支撑作用,气腹压力维持在6~10 mm-Hg便可进行手术操作,可减少腹压及CO2对小儿呼吸及循环系统的影响。
根治性切除瘤体及术后及时规范的多药联合化疗对于提高神经母细胞瘤患者生存率具有重要意义[14]。传统开放手术由于创伤大,术后并发症多,患者术后2周内接受辅助化疗常较为困难。传统腹腔镜及机器人辅助腹腔镜下行儿童肾上腺肿物切除术,患者恢复快,术后并发症更少,术后病理诊断为恶性肿瘤的患者(如神经母细胞瘤、肾上腺皮质癌等)可以在术后更早接受辅助化疗,可一定程度上降低术后复发率。但由于本研究纳入病例数量有限,其获益及远期疗效仍需要大样本的随机对照试验来评价。
综上所述,与传统开放儿童肾上腺肿物切除术相比,腹腔镜技术可以缩小手术范围,缩短术后恢复时间,且在多数情况下是安全和有效的,手术效果与传统开放手术相当。机器人辅助腹腔镜手术相对于常规腹腔镜技术,具有操作灵活精准、手术视野好等特点,更适合解剖空间狭小的肾上腺肿物切除术。本研究纳入的病例数有限,故需要总结更多病例以及进行随机对照试验来评价该技术的应用价值。
猜你喜欢
中国现代药物应用(2022年16期)2022-09-29
中国药学药品知识仓库(2022年8期)2022-05-09
眼科学报(2022年1期)2022-03-03
现代仪器与医疗(2021年4期)2021-11-05
临床与实验病理学杂志(2021年7期)2021-09-06
感染、炎症、修复(2021年1期)2021-07-28
安徽医药(2021年3期)2021-03-24
幸福家庭(2021年1期)2021-03-08
国际放射医学核医学杂志(2021年10期)2021-02-28
健康必读·下旬刊(2020年2期)2020-03-19