混合光照干扰下静态灰度图像多特征识别仿真
2021-11-17 06:44刘磊,董昕
计算机仿真 2021年4期
刘 磊,董 昕
(电子科技大学成都学院,四川 成都 611731)
1 引言
目前,受混合光照干扰的静态灰度图像通常存在在出处理过程中存在一定的问题,导致图像使用效率不高,由此多特征识别是一个热点话题,在企业机密和航空监控反面更是至关重要。如何能够有效的解决静态灰度图像多特征识别是国内外专家一直挑战的项目。之前Mean Shift均衡算法出现在图像的目标识别中,因为其可以对灰度图像的背景进行稳定跟踪,并有效的识别出其灰度图像中的多特征,从而成为当时的主流算法,但该方法的鲁棒性较差,不能很好的适应复杂的现实环境,导致一些静态灰度图像的特征并不能很好被识别,完整性较差。
文献[1]提出一种基于GLCM和LBP的局部放电灰度图像特征提取,该方法从宏观角度把灰度图像转换为灰度公式矩阵,从而获得高维特征,再建造四种局部放电模型,通过电流法采集静态灰度图像中的多特征,但该方法存在一个严重的弊端,在转换灰度公式矩阵时有很大可能会导致静态灰度图像出现不稳定现象,从而出现电流法采集出来的多特征不完整现象。文献[2]构建一种完整图像灰度信息和纹理特征提取方法,首先采集具有代表性的特征参数,例如灰度平均值、平滑度、对比度、相关性,从上述几种特征参数来识别静态灰度图像的重要特征,但该方法的步骤太过繁琐,需要通过提取大量的特征参数来识别灰度图像中的多特征,导致识别速度慢、效率低。文献[3]提出一种基于图像灰度直方图特征的草莓病虫害识别,该方法首先算出训练集中的直方图,然后提取其中几种重点特征,再对特征进行统一规划处理,最后使用向量机对直方图中的重点特征进行识别,随后将结果转换到静态灰度图像中,从而达到识别的目的,但该方法是从训练集中的直方图提取出多特征进行识别的,随后再转换到静态灰度图像当中,在转换的过程中,容易出现特征不稳定现象,导致静态灰度图像中的特征遭到严重受损。
针对上述问题,提出一种基于Sobel算子和张量分类器的静态灰度图像多特征识别方法,首先使用Sobel算子求取静态灰度图像特征,再将不同方向的向量和灰度图像特征进行融合,得出新的特征,最后用FSTM灰度图像分类器对新的特征进行分类,从而识别出图像中的多特征。实验证明,较比传统方法,使用所提方法识别出的静态灰度图像中多特征更为完整,且识别速度快,鲁棒性具有明显优势,能够为图像的进一步研究提供良好的参考基础。
2 混合光照干扰下静态灰度图像多特征识别
2.1 基于Sobel算子融合图像新特征
采用Sobel算子提取混合光照干扰下静态灰度图像的纹理特征。Sobel算子会依据图像像素点[4]周围区域灰度加权差值,对各个邻域图像块采用卷积核进行卷积操作,获取目标图像梯度信息。Sobel算子的特点是对图像噪声具有平滑作用,得到的数据信息干扰向量较少,使后续识别结果更为精准。Sobel算子使用两组大小为3×3的矩阵与静态灰度图像进行卷积操作,可获得目标图像水平方向和垂直方向亮度差分值,即
(1)
其中,A表示基准图像,Px、Py分别代表水平、垂直方向的图像梯度信息,*代表卷积操作运行过程。静态灰度图像纹理特征根据Sobel算子进行卷积操作运行,将通过上述过程获得的Px和Py融合,即目标图像中的各个像素点Aij含有水平方向和垂直方向的梯度信息{Px(i,j),Py(i,j)}。纹理特征即目标图像目前像素点的纹理特征,采用静态灰度图像像素点纹理特征构建的图像,可以提供准确且清晰的边缘信息,为之后的灰度图像多特征识别提供有效的特征数据。
通过静态灰度图像的水平方向与垂直方向梯度特征和灰度特征结合,组成多特征直方图[5],获取图像的静态特征,进而对多特征精确识别。
对于待配准模板图像构建的静态灰度图像特征模型,是由梯度特征与灰度特征两部分组成。针对待配准模板图像IM(x,y),采用Sobel算子计算IM(x,y)水平方向、垂直方向的梯度特征Px、Py,即静态灰度图像IM(x,y)中各个像素点含有多个特征,IM(x,y)={Px,Py,L},L用于描述灰度值。
通过背景建模的方法,对灰度图像静态特征前景区域进行提取,其前景区域特征视为主要取样特征,减少背景区域特征对主要取样特征的干扰,即
pMask=L[IM(x,y)-C]
(2)
其中,pMask表示加权特征,由加权特征构造的图像即二值化图像,当IM(x,y)像素点位置(x,y)的实质是前景区域的一部分时,计算当前概率密度,当IM(x,y)像素点位置(x,y)的实质为背景区域的一部分时,其概率密度函数的计算选取小概率[6]随机数,确保对加权结果的统计结果可实时更新。
假设,待配准图像像素点Zx,y包含三个特征,可描述为Zx,y={Px,Py,L},对像素点Zx,y建立直方图,目的是减少目标区域,由平移、光照、旋转等因素,所造成的匹配度降低,在对灰度图像特征通过多尺度变换,将变换尺度设定为λ、μ、v,静态灰度图像纹理特征、梯度特征融合后的新特征值为
XI=pMask[λPx+μPy+vL]
(3)
其中,变换尺度通过线性叠加而成,λ=26/32、μ=22/32、v=1/32。
综合上述分析,能够基于Sobel算子完成对灰度图像新特征的提取,为多特征识别提供依据。
2.2 最优质分类张量面的特征识别
设训练样本的数据为Xi∈R(i=1,2,…,l),R为样本数据真子集。分类器函数为一个多重性函数,表示为

(4)
最优质分类的超平面为
(5)

(6)
因为存在多个阶层上的投影,FSTM需要使用迭代算法来代替所有投影。
FSTM在获得投影构成中,要先利用迭代算法。在输入样本是二阶张量的前提下,线性FSTM映射交替算法,即
1)初始化μ=(1,1,…,1)T。
2)建造拉氏函数

(7)
式中,xi为FSTM在v变换尺度上的支持向量[8-9],yi为FSTM在μ变换尺度上的支持向量。求出映射β,构成相似于FSVM问题的求解。
3)得出β之后,令xi=uv,β=v2,和上面相似,u能够经过求解下列问题获得

(8)
式中,ξi表示线性不可分问题所判定的松弛向量。
约束条件为yi(uTxi+b)≥1-ξi,ξi≥0,这同样是FSVM问题,其求出u,按上面的算法迭代至收敛条件,求出最后的映射v与u[10]。
最优质分类张量面表示为uTXiv+b=0,依据最优质分类张量面结果,可得到多特征识别的决策函数[11-12],用下式进行表示
J(Xi)=sign[uTXiv+b]+y(X)
(9)
基于此,能够完成对静态灰度图像的多特征识别。
3 仿真研究
为验证本文方法的有效性,需要进行实验分析,仿真环境为:仿真模拟器:PZPSecuritysimulator,操作系统:windowXP硬件设备:内存ZG,CPU2。
静态灰度图像所提方法的性能包含:识别率、新特征提取率和消耗的时间。识别率是指在干扰条件下,从全部灰度图像中能完整识别出多特征的概率;新特征提取率是指对灰度图像的特征进行融合后,能够获取新特征的概率;消耗的时间是指从静态灰度图像中识别出所有的特征目标所要花费的时间。消耗时间可通过实验测试得到,识别率R和新特征提取率D的计算公式分别如下

(10)
(11)
式中,a1表示识别得到的特征,A表示灰度图像实际存在的特征。a2表示新特征形成数量,Q表示灰度图像特征总量。
为验证所提方法在受到混合光照干扰下的静态灰度图像多特征识别的性能,基于上述实验环境和参数的设定,对本文方法获得的核函数曲面图进行表示,如图1所示。

图1 不同方法的核函数曲面图
依据图1的核函数曲面图,将图像的灰度特征与多特征结合后,把核函数加入进去,可以获得密度函数概率曲面图,如图2所示。
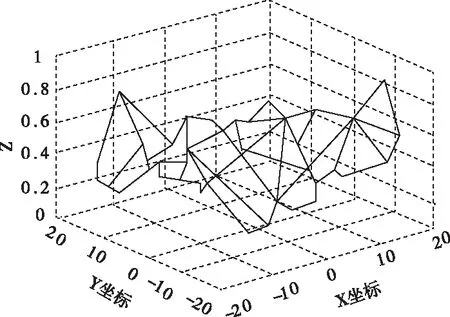
图2 密度函数图
从图2中能够看出,图像中静态灰度特征与周围复杂的环境特征极其相似,假如只利用灰度特征来进行统计核密度,可以得到前景与背景图像的核密度,能够均匀的分散在空间[11]中,不能够突出目标特征,而且目标非常容易丢失,相对来说,图3是通过多特征灰度图像密度特征图而得到的曲线图,从此图中能够看出,其在目标位置附近,该区域位置的核密度非常明显的产生了峰值,因此能够对目标进行更加稳定的跟踪。

图3 多特征灰度图像密度特征图
为了证明所提方法能够完整的识别出静态灰度图像的多个特征,将本文方法和文献[3]方法进行对比,图4所示为同一场景中,不同方法对灰度图像的多特征识别结果。

图4 不同方法识别效果图
通过对图5可以清楚的看出,所提出的方法较文献[3]识别的静态灰度图像,多特征更为完整。表明本文方法性能较好,具有一定的可利用价值。
为进一步验证所提方法在受混合光照干扰下的静态灰度图像多特征识别的优势,将本文与文献[1]方法、文献[2]方法进行性能对比,如表1所示。

表1 性能对比
根据表1数据结果能够看出,所提方法的新特征率高于其它两种方法,同时识别率也要比其它两种方法高,并且在时间的消耗上,所提方法较比其它两种方法用时短,相比其它方法运行速度具有明显优势。
4 结论
本文方法首先使用Soble算子提取图像特征,再把垂直方向、水平方向和静态灰度图像进行融合,得出静态特征,通过加权计算获取融合的新特征,最后通过FSTM灰度图像分类器对新特征进行分类,从而识别出受混合光照干扰的静态灰度图像的多特征。通过实验对比的结果能够看出,所提方法较比传统方法识别速度更快,并且识别结果更加完整,基本不会出现特征受损的问题。
本文主要涉及了Soble算法和FSTM灰度图像分类器,并且取得了一定的成果,但是静态灰度图像多特征识别是一门复杂的研究课题,存在着很多的问题等待广大研究者深入探讨,下面是仅仅就本文遇到的一些问题的讨论和对下一步工作的展望:
1)在灰度图像特征识别中,局部特征的提取提高了分类效果,但是在阴影环境下的静态灰度图像特征识别效果仍然不够理想,有待改善。
2)灰度图像识别要进行搜索全局变换和局部变换,同时还需要构造图像相对特征的分布图,这类算法的复杂性较大,接下来会进一步研究如何提高全局和局部之间的转换效率。
3)在灰度图像识别中,拥有较低的分辨率和较高噪声是其主要得特点,二者之间的融合和识别都存在大量的研究空间。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
集装箱化(2021年1期)2021-04-12
校园英语·上旬(2020年1期)2020-05-09
中国信息技术教育(2020年2期)2020-02-02
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
电脑知识与技术(2018年35期)2018-02-27
卷宗(2017年16期)2017-08-30
科学家(2017年12期)2017-08-10
国外科技新书评介(2014年12期)2015-01-05